Python使用OpenCV进行标定
本文结合OpenCV官方样例,对官方样例中的代码进行修改,使其能够正常运行,并对自己采集的数据进行实验和讲解。
一、准备
OpenCV使用棋盘格板进行标定,如下图所示。为了标定相机,我们需要输入一系列三维点和它们对应的二维图像点。在黑白相间的棋盘格上,二维图像点很容易通过角点检测找到。而对于真实世界中的三维点呢?由于我们采集中,是将相机放在一个地方,而将棋盘格定标板进行移动变换不同的位置,然后对其进行拍摄。所以我们需要知道(X,Y,Z)的值。但是简单来说,我们定义棋盘格所在平面为XY平面,即Z=0。对于定标板来说,我们可以知道棋盘格的方块尺寸,例如30mm,这样我们就可以把棋盘格上的角点坐标定义为(0,0,0),(30,0,0),(60,0,0),···,这个结果的单位是mm。
3D点称为object points,2D图像点称为image points。
二、检测棋盘格角点
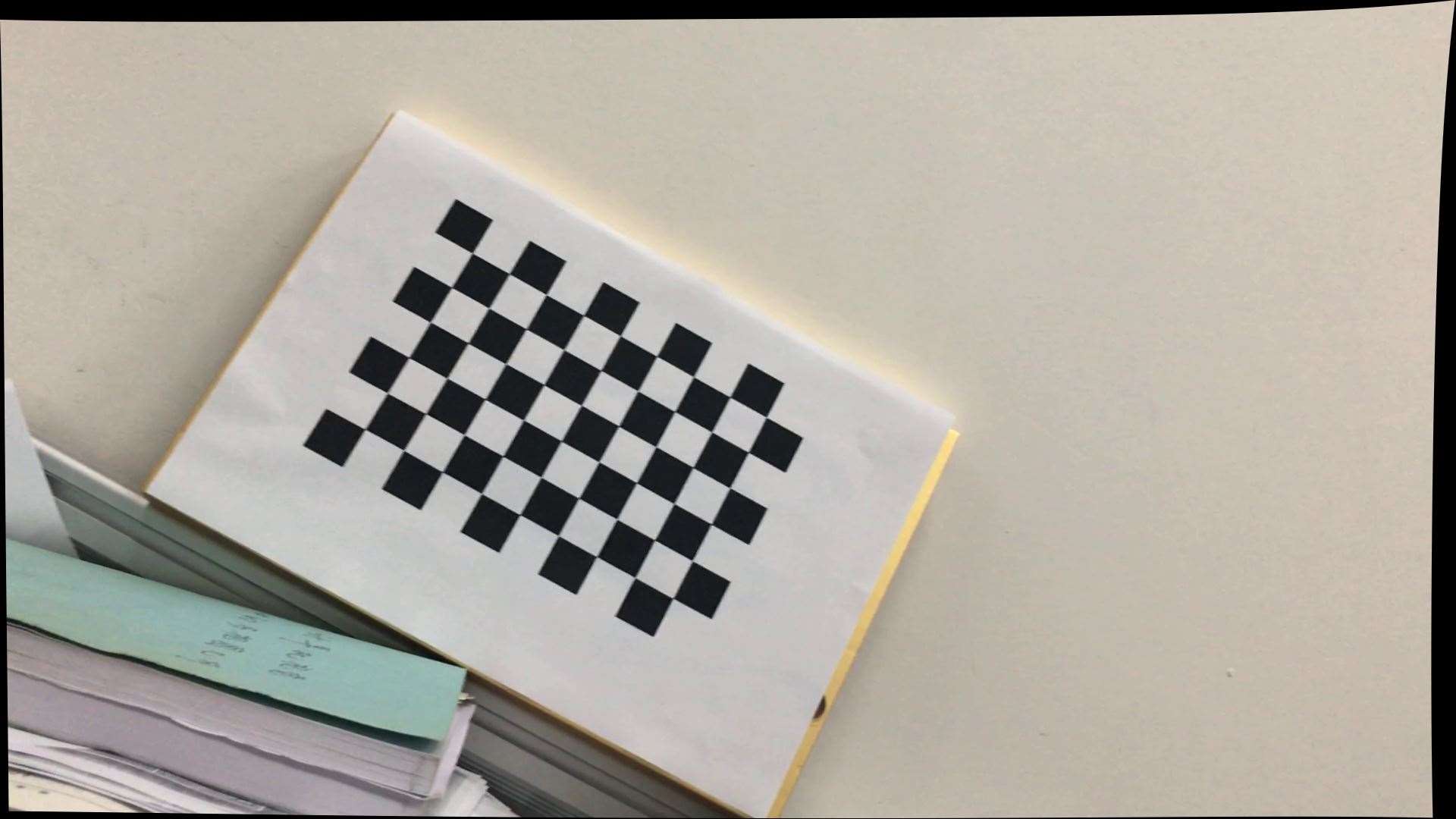
为了找到棋盘格模板,我们使用openCV中的函数cv2.findChessboardCorners()。我们也需要告诉程序我们使用的模板是什么规格的,例如8*8的棋盘格或者5*5棋盘格等,建议使用x方向和y方向个数不相等的棋盘格模板。下面实验中,我们使用的是10*7的棋盘格,每个方格边长是20mm,即含有9*6的内部角点。这个函数如果检测到模板,会返回对应的角点,并返回true。当然不一定所有的图像都能找到需要的模板,所以我们可以使用多幅图像进行定标。除了使用棋盘格,我们还可以使用圆点阵,对应的函数为cv2.findCirclesGrid()。
找到角点后,我们可以使用cv2.cornerSubPix()可以得到更为准确的角点像素坐标。我们也可以使用cv2.drawChessboardCorners()将角点绘制到图像上显示。如下图所示:

三、标定
通过上面的步骤,我们得到了用于标定的三维点和与其对应的图像上的二维点对。我们使用cv2.calibrateCamera()进行标定,这个函数会返回标定结果、相机的内参数矩阵、畸变系数、旋转矩阵和平移向量。
四、去畸变
第三步我们已经得到了相机内参和畸变系数,在将图像去畸变之前,我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,通过设定自由自由比例因子alpha。当alpha设为0的时候,将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉。
然后我们就可以使用新得到的内参数矩阵和畸变系数对图像进行去畸变了。有两种方法进行去畸变:
(1)使用cv2.undistort()
这是一个最直接的办法,只用直接调用函数就可以得到去畸变的图像,使用上面的ROI可以对其进行剪裁。代码如下:
# undistort
dst = cv2.undistort(img, mtx, dist, None, newcameramtx)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
下图显示将一张图片去畸变后,保留黑色像素的结果:
(2)使用remmaping
这是一个分两步的方法,首先计算一个从畸变图像到非畸变图像的映射,然后使用这个映射关系对图像进行去畸变。
代码如下:
# undistort
mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
# crop the image
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
五、反投影误差
通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
代码
所有步骤的代码如下所示:
#coding:utf-8
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
#棋盘格模板规格
w = 9
h = 6
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
images = glob.glob('calib/*.png')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.imshow('findCorners',img)
cv2.waitKey(1)
cv2.destroyAllWindows()
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# 去畸变
img2 = cv2.imread('calib/00169.png')
h, w = img2.shape[:2]
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
#x,y,w,h = roi
#dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.png',dst)
# 反投影误差
total_error = 0
for i in xrange(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)
total_error += error
print "total error: ", total_error/len(objpoints)
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
您可能感兴趣的文章:
- 聊一聊OpenCV相机标定
相关推荐
-
聊一聊OpenCV相机标定
相机标定:简单的说,就是获得相机参数的过程.参数如:相机内参数矩阵,投影矩阵,旋转矩阵和平移矩阵等 什么叫相机参数? 简单的说,将现实世界中的人.物,拍成一张图像(二维).人或物在世界中的三维坐标,和图像上对应的二维坐标间的关系.表达两种不同维度坐标间的关系用啥表示?用相机参数. 相机的成像原理 先来看一下,相机的成像原理: 如图所示,这是一个相机模型.将物体简化看成一个点.来自物体的光,通过镜头,击中图像平面(图像传感器),以此成像.d0是物体到镜头的距离,di时镜头到图像平面的距离,f是镜头
-
Python使用OpenCV进行标定
本文结合OpenCV官方样例,对官方样例中的代码进行修改,使其能够正常运行,并对自己采集的数据进行实验和讲解. 一.准备 OpenCV使用棋盘格板进行标定,如下图所示.为了标定相机,我们需要输入一系列三维点和它们对应的二维图像点.在黑白相间的棋盘格上,二维图像点很容易通过角点检测找到.而对于真实世界中的三维点呢?由于我们采集中,是将相机放在一个地方,而将棋盘格定标板进行移动变换不同的位置,然后对其进行拍摄.所以我们需要知道(X,Y,Z)的值.但是简单来说,我们定义棋盘格所在平面为XY平面,即Z=
-

在树莓派2或树莓派B+上安装Python和OpenCV的教程
我的Raspberry Pi 2昨天刚邮到,这家伙看上去很小巧可爱. 这小家伙有4核900MHZ的处理器,1G内存.要知道,Raspberry Pi 2 可比我中学电脑实验室里大多数电脑快多了. 话说,自从Raspberry Pi 2发布以来,我收到了很多请求,要求我能写一个在它上面安装OpenCV和Python的详细说明. 因此如果你想在Raspberry Pi启动运行OpenCV和Python,就往下面看! 在博文的剩余部分,我将提供在Raspberry Pi 2 和Raspberry Pi
-
python使用opencv读取图片的实例
安装好环境后,开始了第一个Hello word 例子,如何读取图片,保存图品 import cv2 import numpy as np import matplotlib.pyplot as plt #读取图片代码 img = cv2.imread('test.jpg',cv2.IMREAD_GRAYSCALE) #IMREAD_COLOR = 1 #IMREAD_UNCHANGED = -1 #展示图片 cv2.imshow('image',img) cv2.waitKey(0) cv2.d
-
利用Python和OpenCV库将URL转换为OpenCV格式的方法
今天的博客是直接来源于我自己的个人工具函数库. 过去几个月,有些PyImageSearch读者电邮问我:"如何获取URL指向的图片并将其转换成OpenCV格式(不用将其写入磁盘再读回)".这篇文章我将展示一下怎么实现这个功能. 额外的,我们也会看到如何利用scikit-image从URL下载一幅图像.当然前行之路也会有一个常见的错误,它可能让你跌个跟头. 继续往下阅读,学习如何利用利用Python和OpenCV将URL转换为图像 方法1:OpenCV.NumPy.urllib 第一个方
-
python通过opencv实现批量剪切图片
上一篇文章中,我们介绍了python实现图片处理和特征提取详解,这里我们再来看看Python通过OpenCV实现批量剪切图片,具体如下. 做图像处理需要大批量的修改图片尺寸来做训练样本,为此本程序借助opencv来实现大批量的剪切图片. import cv2 import os def cutimage(dir,suffix): for root,dirs,files in os.walk(dir): for file in files: filepath = os.path.join(root
-
Python通过OpenCV的findContours获取轮廓并切割实例
1 获取轮廓 OpenCV2获取轮廓主要是用cv2.findContours import numpy as np import cv2 im = cv2.imread('test.jpg') imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours, hierarchy = cv2.findContours(thresh,cv2.RETR_T
-
python使用opencv按一定间隔截取视频帧
关于opencv OpenCV 是 Intel 开源计算机视觉库 (Computer Version) .它由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法. OpenCV 拥有包括 300 多个 C 函数的跨平台的中.高层 API .它不依赖于其它的外部库 -- 尽管也可以使用某些外部库. OpenCV 对非商业应用和商业应用都是免费 的.同时 OpenCV 提供了对硬件的访问,可以直接访问摄像头,并且 opencv 还提供了一个简单的 GUI(graph
-
Python实现OpenCV的安装与使用示例
本文实例讲述了Python实现OpenCV的安装与使用.分享给大家供大家参考,具体如下: 由于下一步要开始研究下深度学习,而深度学习领域很多的算法和应用都是用Python来实现的,把Python转成C++代码耗时太多,不如直接学习下Python直接医用Python的代码.搭建Python环境的过程是很耗时的,但是现在回头来看又觉得其实没有多少步骤,主要是在自己不明白的时候老是会出现各种各样奇奇怪怪的问题.现在只是对正确的步骤做个记录吧. 环境搭建: 1.Python的安装,没什么可说的,一直下一
-
使用Python的OpenCV模块识别滑动验证码的缺口(推荐)
最近终于找到一个好的方法,使用Python的OpenCV模块识别滑动验证码的缺口,可以将滑动验证码中的缺口识别出来了. 测试使用如下两张图片: target.jpg template.png 现在想要通过"template.png"在"target.jpg"中找到对应的缺口,代码实现如下: # encoding=utf8 import cv2 import numpy as np def show(name): cv2.imshow('Show', name) cv
-
Python基于OpenCV实现人脸检测并保存
本文实例为大家分享了Python基于OpenCV实现人脸检测,并保存的具体代码,供大家参考,具体内容如下 安装opencv 如果安装了pip的话,Opencv的在windows的安装可以直接通过cmd命令pip install opencv-python(只需要主要模块),也可以输入命令pip install opencv-contrib-python(如果需要main模块和contrib模块) 详情可以点击此处 导入opencv import cv2 所有包都包含haarcascade文件.这