opencv3/C++基于颜色的目标跟踪方式
inRange函数
void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst);
src:输入图像;
lowerb:下边界数组,阈值下限;
upperb:上边界数组,阈值上限;
dst:输出图像;
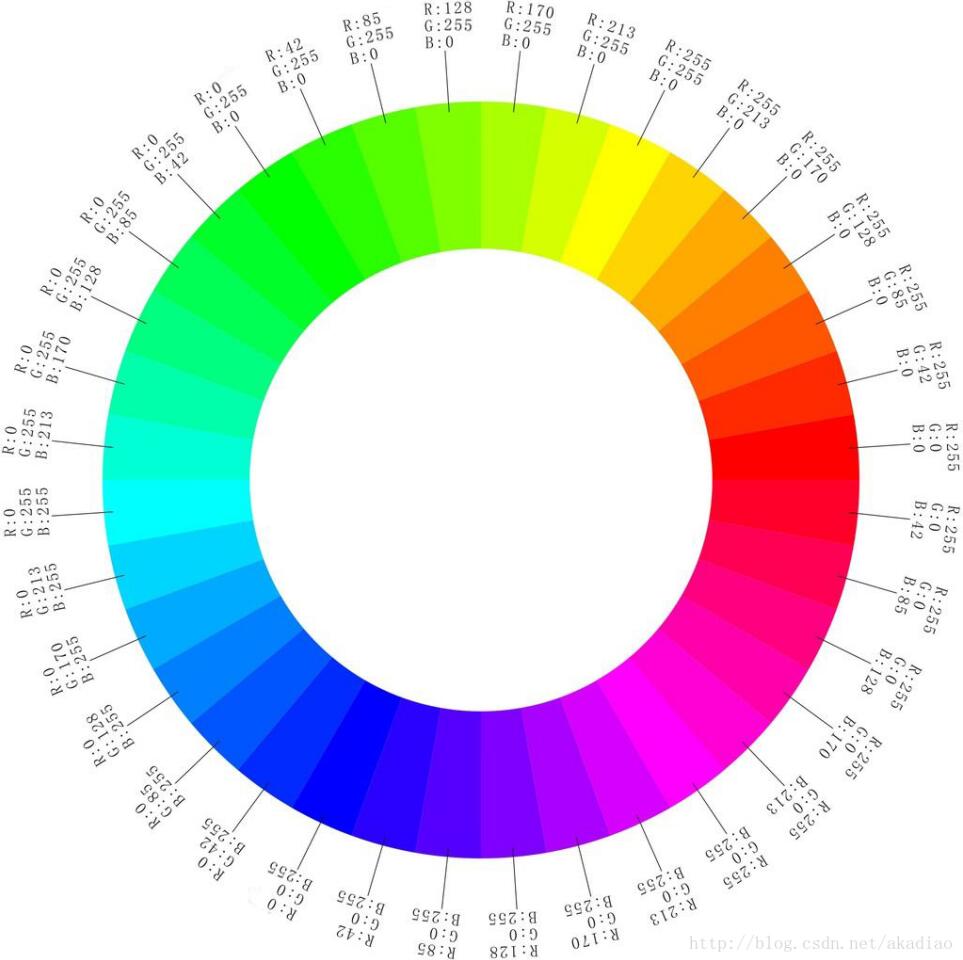
颜色范围如图:
示例:
捕获摄像头中的黄色方块
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
VideoCapture capture;
capture.open(0);
if(!capture.isOpened())
{
printf("can not open video file \n");
return -1;
}
Mat frame, dst;
Mat kernel;
//开操作处理
kernel = getStructuringElement(MORPH_RECT, Size(5, 5));
namedWindow("input", CV_WINDOW_AUTOSIZE);
namedWindow("output", CV_WINDOW_AUTOSIZE);
std::vector<std::vector<Point>> contours;
std::vector<Vec4i> hireachy;
Rect rect;
Point2f center;
float radius=20;
while (capture.read(frame))
{
//blur(frame, dst, Size(5,5));
inRange(frame, Scalar(0,80,80), Scalar(50,255,255), dst);
//开操作
morphologyEx(dst,dst,MORPH_OPEN,kernel);
//获取边界
findContours(dst, contours, hireachy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0,0));
//框选面积最大的边界
if (contours.size() > 0)
{
double maxArea=0;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[static_cast<int>(i)]);
if (area > maxArea)
{
maxArea = area;
rect = boundingRect(contours[static_cast<int>(i)]);
minEnclosingCircle(contours[static_cast<int>(i)], center, radius);
}
}
}
//矩形框
//rectangle(frame,rect, Scalar(0,255,0),2);
//圆形框
circle(frame, Point(center.x,center.y), (int)radius, Scalar(0,255,0), 2);
imshow("input", frame);
imshow("output", dst);
waitKey(100);
}
capture.release();
return 0;
}

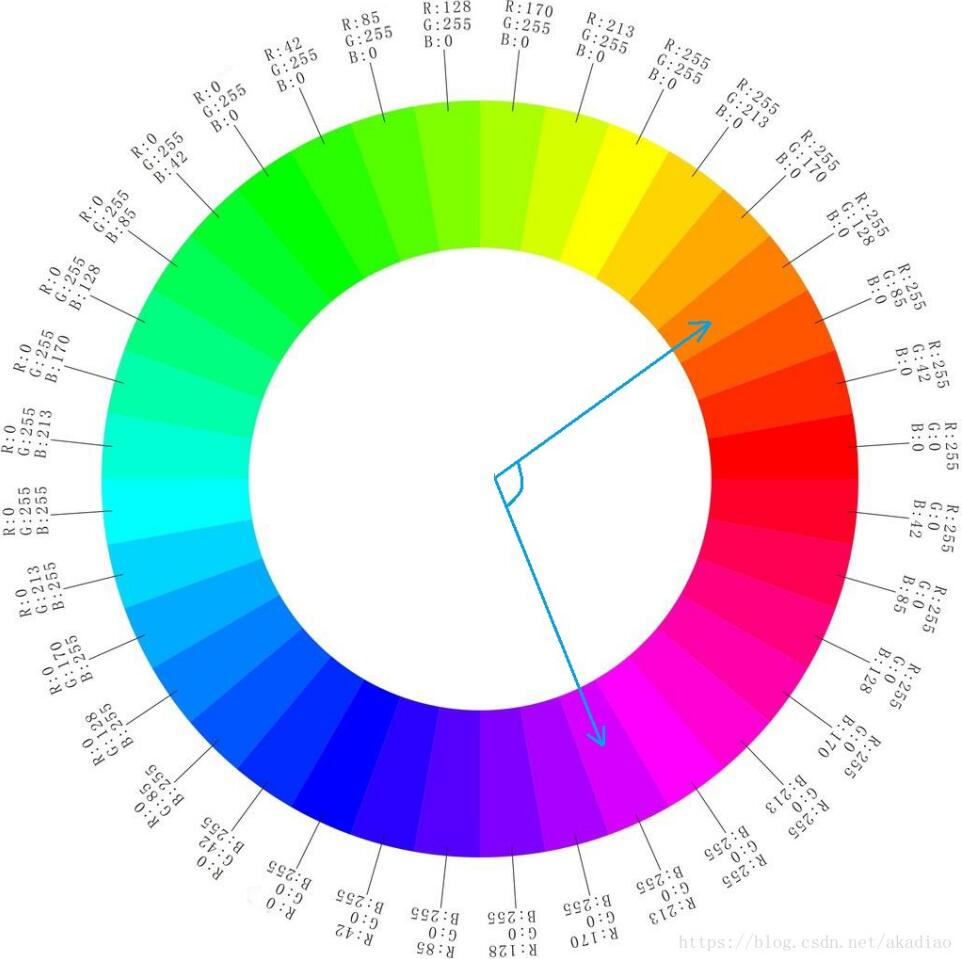
关于颜色范围的选取:
有朋友问颜色范围的事,比如我们选择某个偏红色的范围,如色环图中这个区间即BGR(0,128,255)到BGR(255,0,213);则B、G、R这三个通道的范围分别为0-255,0-128,213-255。因此阈值下限lowerb=Scalar(0,0,213),阈值上限upperb=Scalar(255,128,255)。
以上这篇opencv3/C++基于颜色的目标跟踪方式就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
基于C++实现kinect+opencv 获取深度及彩色数据
开发环境 vs2010+OPENCV2.4.10 首先,下载最新的Kinect 2 SDK http://www.microsoft.com/en-us/kinectforwindows/develop/downloads-docs.aspx 下载之后不要插入Kinect,最好也不用插入除了键盘鼠标以外的其它USB设备,然后安装SDK,安装完成之后插入Kinect,会有安装新设备的提示.安装完成之后可以去"开始"那里找到两个新安装的软件,一个是可以显示Kinect深度图,另外一个软件
-
opencv3/C++ 使用Tracker实现简单目标跟踪
简介 MIL: TrackerMIL 以在线方式训练分类器将对象与背景分离;多实例学习避免鲁棒跟踪的漂移问题. OLB: TrackerBoosting 基于AdaBoost算法的在线实时对象跟踪.分类器在更新步骤中使用周围背景作为反例以避免漂移问题. MedianFlow: TrackerMedianFlow 跟踪器适用于非常平滑和可预测的运动,物体在整个序列中可见. TLD: TrackerTLD 将长期跟踪任务分解为跟踪,学习和检测.跟踪器在帧之间跟踪对象.探测器本地化所观察到的所有外观,
-
opencv3/C++实现光流点追踪
光流金字塔 calcOpticalFlowPyrLK()函数参数说明: void calcOpticalFlowPyrLK( InputArray prevImg, //第一个8位输入图像或者通过 buildOpticalFlowPyramid()建立的金字塔 InputArray nextImg,//第二个输入图像或者和prevImg相同尺寸和类型的金字塔 InputArray prevPts, //二维点向量存储找到的光流:点坐标必须是单精度浮点数 InputOutputArray next
-
opencv3/C++图像像素操作详解
RGB图像转灰度图 RGB图像转换为灰度图时通常使用: 进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像. #include<opencv2/opencv.hpp> #include<math.h> using namespace cv; int main() { //像素操作 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(src.empty()) { printf
-
opencv3/C++ HOG特征提取方式
HOG特征 HOG(Histograms of Oriented Gradients)梯度方向直方图 通过利用梯度信息能反映图像目标的边缘信息并通过局部梯度的大小将图像局部的外观和形状特征化.在论文Histograms of Oriented Gradients for Human Detection中被提出. HOG特征的提取过程为: Gamma归一化: 计算梯度: 划分cell 组合成block,统计block直方图: 梯度直方图归一化: 收集HOG特征. Gamma归一化: 对图像颜色进行
-
opencv3/C++基于颜色的目标跟踪方式
inRange函数 void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst); src:输入图像: lowerb:下边界数组,阈值下限: upperb:上边界数组,阈值上限: dst:输出图像: 颜色范围如图: 示例: 捕获摄像头中的黄色方块 #include<opencv2/opencv.hpp> using namespace cv; int main() { VideoCaptu
-

基于OpenCV目标跟踪实现人员计数器
目录 1.了解对象检测与对象跟踪 2.结合对象检测和对象跟踪 3.项目结构 4.结合对象跟踪算法 5.创建可追踪对象 6.使用OpenCV+Python实现我们的人员计数器 7.完整代码 people_counter.py centroidtracker.py trackableobject.py 8.运行结果 9.改进我们的人员计数器应用程序 BONUS 在本教程中,您将学习如何使用 OpenCV 和 Python 构建人员计数器.使用 OpenCV,我们将实时计算进或出百货商店的人数. 在今
-
基于OpenCV4.2实现单目标跟踪
目录 1.什么是目标跟踪 2.跟踪与检测 3.使用OpenCV4实现对象跟踪 3.1使用OpenCV4实现对象跟踪C++代码 3.2使用OpenCV4实现对象跟踪Python代码 4.跟踪算法解析 4.1BOOSTINGTracker 4.2MILTracker 4.3KCFTracker 4.4TLDTracker 4.5MEDIANFLOWTracker 4.6GOTURNtracker 4.7MOSSEtracker 4.8CSRTtracker 在本教程中,我们将学习使用OpenCV跟踪
-
Python+OpenCV目标跟踪实现基本的运动检测
目标跟踪是对摄像头视频中的移动目标进行定位的过程,有着非常广泛的应用.实时目标跟踪是许多计算机视觉应用的重要任务,如监控.基于感知的用户界面.增强现实.基于对象的视频压缩以及辅助驾驶等. 有很多实现视频目标跟踪的方法,当跟踪所有移动目标时,帧之间的差异会变的有用:当跟踪视频中移动的手时,基于皮肤颜色的均值漂移方法是最好的解决方案:当知道跟踪对象的一方面时,模板匹配是不错的技术. 本文代码是做一个基本的运动检测 考虑的是"背景帧"与其它帧之间的差异 这种方法检测结果还是挺不错的,但是需要
-
50行Python代码实现视频中物体颜色识别和跟踪(必须以红色为例)
目前计算机视觉(CV)与自然语言处理(NLP)及语音识别并列为人工智能三大热点方向,而计算机视觉中的对象检测(objectdetection)应用非常广泛,比如自动驾驶.视频监控.工业质检.医疗诊断等场景. 目标检测的根本任务就是将图片或者视频中感兴趣的目标提取出来,目标的识别可以基于颜色.纹理.形状.其中颜色属性运用十分广泛,也比较容易实现.下面就向大家分享一个我做的小实验---通过OpenCV的Python接口来实现从视频中进行颜色识别和跟踪. 下面就是我们完整的代码实现(已调试运行): i
-
python目标检测基于opencv实现目标追踪示例
目录 主要代码 信息封装类 更新utils python-opencv3.0新增了一些比较有用的追踪器算法,这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 主要代码 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视者模块,负责入侵检测,目标跟踪 ''' class WatchDo
-
opencv3/C++轮廓的提取与筛选方式
轮廓提取 findContours发现轮廓 findContours( InputOutputArray binImg, //输入8bit图像,0值像素值不变,非0的像素看成1:(变为二值图像) OutputArrayOfArrays contours,//输出找到的轮廓对象 OutputArray, hierachy// 图像的拓扑结构 int mode, //轮廓返回的模式(RETR_TREE等) int method,//发现方法(CHAIN_APPROX_SIMPLE等) Point o
-
Python+OpenCV实现基于颜色的目标识别
目录 任务 主要代码 效果展示 学习了一点opencv的知识于是找了个小项目来实践一下.这里先说明一下,我的实现方法不见得是最好的(因为这只是一个用于练习的项目)仅作参考,也欢迎各位大佬指正. 任务 让摄像头识别到视野范围内的气球并返回每个气球的中心点坐标. 因为场地固定,背景单一,所以省下来很多操作和处理.于是就有两种解决思路:第一种是基于气球形状做轮廓提取,只要是闭合椭圆或圆形形就认为是目标物体:第二种是基于气球颜色,只要符合目标物体的颜色就认为是目标物体. 因为摄像头是装在四足机器人(它的
-
python+opencv实现目标跟踪过程
目录 python opencv实现目标跟踪 这里根据官网示例写了一个追踪器类 python opencv实现目标跟踪 python-opencv3.0新增了一些比较有用的追踪器算法 这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视