OpenCV实现背景分离(证件照背景替换)
目录
- 实现原理
- 功能函数代码
- C++测试代码
- 完整改进代码
本文主要介绍了OpenCV实现背景分离(证件照背景替换),具有一定的参考价值,感兴趣的可以了解一下
实现原理
图像背景分离是常见的图像处理方法之一,属于图像分割范畴。如何较优地提取背景区域,难点在于两个:
- 背景和前景的分割。针对该难点,通过人机交互等方法获取背景色作为参考值,结合差值均方根设定合理阈值,实现前景的提取,PS上称为蒙版;提取过程中,可能会遇到前景像素丢失的情况,对此可通过开闭运算或者提取外部轮廓线的方式,将前景内部填充完毕。
- 前景边缘轮廓区域的融合。如果不能很好地融合,就能看出明显的抠图痕迹,所以融合是很关键的一步。首先,对蒙版区(掩膜)进行均值滤波,其边缘区会生成介于0-255之间的缓存区;其次,通过比例分配的方式对缓存区的像素点上色,我固定的比例为前景0.3背景0.7,因为背景为单色区,背景比例高,可以使得缓存区颜色倾向于背景区,且实现较好地过渡;最后,蒙版为0的区域上背景色,蒙版为255的区域不变。
至此,图像实现了分割,完成背景分离。C++实现代码如下。
功能函数代码
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(100, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(mask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(mask, contour, -1, Scalar(255), FILLED,4);
// 闭运算
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
cv::morphologyEx(mask, mask, MORPH_CLOSE, element);
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
C++测试代码
#include <opencv2/opencv.hpp>
#include <iostream>
#include <algorithm>
#include <time.h>
using namespace cv;
using namespace std;
// 输入参数
struct Inputparama {
int thresh = 30; // 背景识别阈值,该值越小,则识别非背景区面积越大,需有合适范围,目前为5-60
int transparency = 255; // 背景替换色透明度,255为实,0为透明
int size = 7; // 非背景区边缘虚化参数,该值越大,则边缘虚化程度越明显
cv::Point p = cv::Point(0, 0); // 背景色采样点,可通过人机交互获取,也可用默认(0,0)点颜色作为背景色
cv::Scalar color = cv::Scalar(255, 255, 255); // 背景色
};
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input);
// 计算差值均方根
int geiDiff(uchar b,uchar g,uchar r,uchar tb,uchar tg,uchar tr)
{
return int(sqrt(((b - tb)*(b - tb) + (g - tg)*(g - tg) + (r - tr)*(r - tr))/3));
}
int main()
{
cv::Mat src = imread("111.jpg");
Inputparama input;
input.thresh = 100;
input.transparency = 255;
input.size = 6;
input.color = cv::Scalar(0, 0, 255);
clock_t s, e;
s = clock();
cv::Mat result = BackgroundSeparation(src, input);
e = clock();
double dif = e - s;
cout << "time:" << dif << endl;
imshow("original", src);
imshow("result", result);
imwrite("result1.png", result);
waitKey(0);
return 0;
}
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(100, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(mask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(mask, contour, -1, Scalar(255), FILLED,4);
// 闭运算
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
cv::morphologyEx(mask, mask, MORPH_CLOSE, element);
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
测试效果

图1 原图和红底色效果图对比
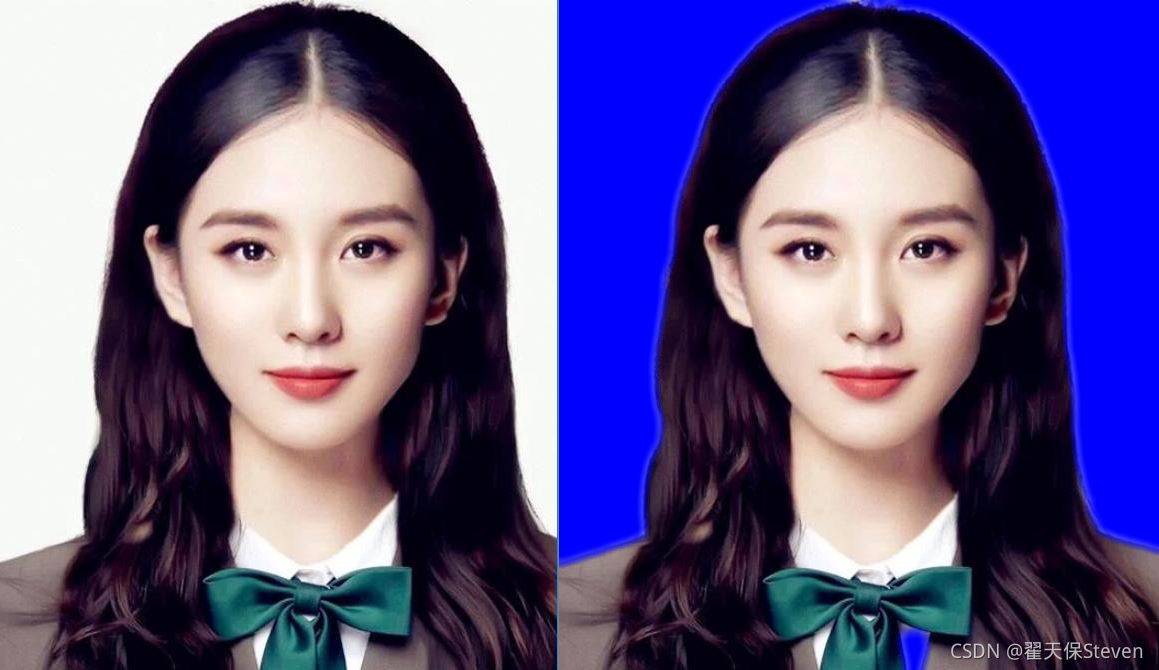
图2 原图和蓝底色效果图对比

图3 原图和透明底色效果图对比
如源码所示,函数输入参数共有5项,其说明如下:
- thresh为背景识别阈值,该值范围为5-100,用来区分背景区和前景区,合理设置,不然可能出现前景区大片面积丢失的情况。
- p为背景色采样点,可通过人机交互的方式人为选中背景区颜色,默认为图像原点的颜色。
- color为重绘背景色。
- transparency为重绘背景色的透明度,255为实色,0为全透明。
- size为边缘虚化参数,控制均值滤波的窗口尺寸,范围为0-30。
我对比了百度搜索证件照一键改色网站的效果,基本一致,它们处理一次4块钱,我们这是免费的,授人以鱼不如授人以渔对吧,学到就是赚到。当然人家的功能肯定更强大,估计集成了深度学习一类的框架,我们还需要调参。美中不足的地方就由兄弟们一起改进了。
细心的biliy发现了我贴图的问题,如图1图2图3所示,领口处被当做背景色了,这样当然不行,接下来开始改进功能。
1)首先分析原因,之所以领口被当做背景色,是因为领口为白色,同背景色一致,且连接图像边缘处,进行轮廓分析时,错将这个领口识别为轮廓外,如图4所示。
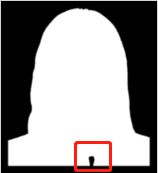
图4 识别失败
2)正如图4所示,仅仅用闭运算是无法有效补偿的,如果将窗口尺寸加大还可能使其他位置过度填充,接下来考虑如何只填充这类大洞。先将处理图像的宽高各扩展50个pixel,这样做的好处是令轮廓的识别更精准和清晰,并且避免了头顶处因贴近图像边缘,而导致的过度膨胀现象。
cv::Mat tmask = cv::Mat::zeros(row + 50, col + 50, CV_8UC1); mask.copyTo(tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)));
3)之后进行黑帽运算,即闭运算减原图,得到图5。

图5 黑帽运算
4)用Clear_MicroConnected_Area函数清除小面积连通区,得到图6。
(该函数介绍见:https://www.jb51.net/article/221904.htm)

图6 清除小面积连通区
5)黑帽运算结果加至原轮廓图,并截取实际图像尺寸。
// 黑帽运算获取同背景色类似的区域,识别后填充 cv::Mat hat; cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(31, 31)); cv::morphologyEx(tmask, hat, MORPH_BLACKHAT, element); hat.setTo(255, hat > 0); cv::Mat hatd; // 清除小面积区域 Clear_MicroConnected_Areas(hat, hatd, 450); tmask = tmask + hatd; // 截取实际尺寸 mask = tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)).clone();
6)至此,就得到完整的轮廓了,如图7所示,完整代码见后方。

图7 完整轮廓图
完整改进代码
#include <opencv2/opencv.hpp>
#include <iostream>
#include <algorithm>
#include <time.h>
using namespace cv;
using namespace std;
// 输入参数
struct Inputparama {
int thresh = 30; // 背景识别阈值,该值越小,则识别非背景区面积越大,需有合适范围,目前为5-60
int transparency = 255; // 背景替换色透明度,255为实,0为透明
int size = 7; // 非背景区边缘虚化参数,该值越大,则边缘虚化程度越明显
cv::Point p = cv::Point(0, 0); // 背景色采样点,可通过人机交互获取,也可用默认(0,0)点颜色作为背景色
cv::Scalar color = cv::Scalar(255, 255, 255); // 背景色
};
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input);
void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area);
// 计算差值均方根
int geiDiff(uchar b,uchar g,uchar r,uchar tb,uchar tg,uchar tr)
{
return int(sqrt(((b - tb)*(b - tb) + (g - tg)*(g - tg) + (r - tr)*(r - tr))/3));
}
int main()
{
cv::Mat src = imread("111.jpg");
Inputparama input;
input.thresh = 100;
input.transparency = 255;
input.size = 6;
input.color = cv::Scalar(0, 0, 255);
clock_t s, e;
s = clock();
cv::Mat result = BackgroundSeparation(src, input);
e = clock();
double dif = e - s;
cout << "time:" << dif << endl;
imshow("original", src);
imshow("result", result);
imwrite("result1.png", result);
waitKey(0);
return 0;
}
// 背景分离
cv::Mat BackgroundSeparation(cv::Mat src, Inputparama input)
{
cv::Mat bgra, mask;
// 转化为BGRA格式,带透明度,4通道
cvtColor(src, bgra, COLOR_BGR2BGRA);
mask = cv::Mat::zeros(bgra.size(), CV_8UC1);
int row = src.rows;
int col = src.cols;
// 异常数值修正
input.p.x = max(0, min(col, input.p.x));
input.p.y = max(0, min(row, input.p.y));
input.thresh = max(5, min(200, input.thresh));
input.transparency = max(0, min(255, input.transparency));
input.size = max(0, min(30, input.size));
// 确定背景色
uchar ref_b = src.at<Vec3b>(input.p.y, input.p.x)[0];
uchar ref_g = src.at<Vec3b>(input.p.y, input.p.x)[1];
uchar ref_r = src.at<Vec3b>(input.p.y, input.p.x)[2];
// 计算蒙版区域(掩膜)
for (int i = 0; i < row; ++i)
{
uchar *m = mask.ptr<uchar>(i);
uchar *b = src.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if ((geiDiff(b[3*j],b[3*j+1],b[3*j+2],ref_b,ref_g,ref_r)) >input.thresh)
{
m[j] = 255;
}
}
}
cv::Mat tmask = cv::Mat::zeros(row + 50, col + 50, CV_8UC1);
mask.copyTo(tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)));
// 寻找轮廓,作用是填充轮廓内黑洞
vector<vector<Point>> contour;
vector<Vec4i> hierarchy;
// RETR_TREE以网状结构提取所有轮廓,CHAIN_APPROX_NONE获取轮廓的每个像素
findContours(tmask, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(tmask, contour, -1, Scalar(255), FILLED,16);
// 黑帽运算获取同背景色类似的区域,识别后填充
cv::Mat hat;
cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(31, 31));
cv::morphologyEx(tmask, hat, MORPH_BLACKHAT, element);
hat.setTo(255, hat > 0);
cv::Mat hatd;
Clear_MicroConnected_Areas(hat, hatd, 450);
tmask = tmask + hatd;
mask = tmask(cv::Range(25, 25 + mask.rows), cv::Range(25, 25 + mask.cols)).clone();
// 掩膜滤波,是为了边缘虚化
cv::blur(mask, mask, Size(2 * input.size+1, 2 * input.size + 1));
// 改色
for (int i = 0; i < row; ++i)
{
uchar *r = bgra.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
// 蒙版为0的区域就是标准背景区
if (m[j] == 0)
{
r[4 * j] = uchar(input.color[0]);
r[4 * j + 1] = uchar(input.color[1]);
r[4 * j + 2] = uchar(input.color[2]);
r[4 * j + 3] = uchar(input.transparency);
}
// 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理
else if (m[j] != 255)
{
// 边缘处按比例上色
int newb = (r[4 * j] * m[j] * 0.3 + input.color[0] * (255 - m[j])*0.7) / ((255 - m[j])*0.7+ m[j] * 0.3);
int newg = (r[4 * j+1] * m[j] * 0.3 + input.color[1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newr = (r[4 * j + 2] * m[j] * 0.3 + input.color[2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
int newt = (r[4 * j + 3] * m[j] * 0.3 + input.transparency * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3);
newb = max(0, min(255, newb));
newg = max(0, min(255, newg));
newr = max(0, min(255, newr));
newt = max(0, min(255, newt));
r[4 * j] = newb;
r[4 * j + 1] = newg;
r[4 * j + 2] = newr;
r[4 * j + 3] = newt;
}
}
}
return bgra;
}
void Clear_MicroConnected_Areas(cv::Mat src, cv::Mat &dst, double min_area)
{
// 备份复制
dst = src.clone();
std::vector<std::vector<cv::Point> > contours; // 创建轮廓容器
std::vector<cv::Vec4i> hierarchy;
// 寻找轮廓的函数
// 第四个参数CV_RETR_EXTERNAL,表示寻找最外围轮廓
// 第五个参数CV_CHAIN_APPROX_NONE,表示保存物体边界上所有连续的轮廓点到contours向量内
cv::findContours(src, contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_NONE, cv::Point());
if (!contours.empty() && !hierarchy.empty())
{
std::vector<std::vector<cv::Point> >::const_iterator itc = contours.begin();
// 遍历所有轮廓
while (itc != contours.end())
{
// 定位当前轮廓所在位置
cv::Rect rect = cv::boundingRect(cv::Mat(*itc));
// contourArea函数计算连通区面积
double area = contourArea(*itc);
// 若面积小于设置的阈值
if (area < min_area)
{
// 遍历轮廓所在位置所有像素点
for (int i = rect.y; i < rect.y + rect.height; i++)
{
uchar *output_data = dst.ptr<uchar>(i);
for (int j = rect.x; j < rect.x + rect.width; j++)
{
// 将连通区的值置0
if (output_data[j] == 255)
{
output_data[j] = 0;
}
}
}
}
itc++;
}
}
}
改进效果

图8 原图与红底对比图

图9 原图与蓝底对比图

图10 原图与透明底对比图
到此这篇关于OpenCV实现背景分离(证件照背景替换)的文章就介绍到这了,更多相关OpenCV 背景分离内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
基于OpenCV python3实现证件照换背景的方法
简述 生活中经常要用到各种要求的证件照电子版,红底,蓝底,白底等,大部分情况我们只有其中一种,所以通过技术手段进行合成,用ps处理证件照,由于技术不到位,有瑕疵,所以想用python&openCV通过代码的方式实现背景颜色替换,加强一下对于openCV的学习,锻炼一下编码水平. 软件环境: python3.5 opencv2 windows 10 图像载入 导入opencv库,使用imread函数读取图片 import cv2 import numpy as np img=cv2.imread(
-
opencv3/C++实现视频背景去除建模(BSM)
视频背景建模主要使用到: 高斯混合模型(Mixture Of Gauss,MOG) createBackgroundSubtractorMOG2(int history=500, double varThreshold=16,bool detectShadows=true); K最近邻(k-NearestNeighbor,kNN) createBackgroundSubtractorKNN(int history=500, double dist2Threshold=400.0, bool de
-
python3基于OpenCV实现证件照背景替换
本文实例为大家分享了python3实现证件照背景替换的具体代码,供大家参考,具体内容如下 import cv2 import numpy as np img=cv2.imread('zjz.jpg') #缩放 rows,cols,channels = img.shape img=cv2.resize(img,None,fx=0.5,fy=0.5) rows,cols,channels = img.shape cv2.imshow('img',img) #转换hsv hsv=cv2.cvtColo
-
Opencv实现抠图背景图替换功能
本文实例为大家分享了Opencv实现抠图替换背景图的具体代码,供大家参考,具体内容如下 下面简单图片演示一下: 提取mask: ===> 替换背景: + = python的opencv代码如下: # coding=utf-8 import cv2 import numpy as np img=cv2.imread('lp.jpg') img_back=cv2.imread('back.jpg') #日常缩放 rows,cols,channels = img_back.shape img_bac
-
用opencv给图片换背景色的示例代码
图像平滑 模糊/平滑图片来消除图片噪声 OpenCV函数:cv2.blur(), cv2.GaussianBlur(), cv2.medianBlur(), cv2.bilateralFilter() 2D 卷积 OpenCV中用cv2.filter2D()实现卷积操作,比如我们的核是下面这样(3×3区域像素的和除以10): img = cv2.imread('lena.jpg') # 定义卷积核 kernel = np.ones((3, 3), np.float32) / 10 # 卷积操作,
-
Python + opencv对拍照得到的图片进行背景去除的实现方法
有时候我们没办法得到pdf或者word文档,这个时候会使用手机或者相机进行拍照,往往会出现背景,打印出来就是灰色的或者有黑色的背景,这个时候影响视野观看,通过代码实现对背景去除,还原清晰图像.代码如下: #!/usr/bin/python3.6 # -*- coding: utf-8 -*- # @Time : 2020/11/17 19:06 # @Author : ptg # @Email : zhxwhchina@163.com # @File : 去背景.py # @Software:
-

OpenCV实现背景分离(证件照背景替换)
目录 实现原理 功能函数代码 C++测试代码 完整改进代码 本文主要介绍了OpenCV实现背景分离(证件照背景替换),具有一定的参考价值,感兴趣的可以了解一下 实现原理 图像背景分离是常见的图像处理方法之一,属于图像分割范畴.如何较优地提取背景区域,难点在于两个: 背景和前景的分割.针对该难点,通过人机交互等方法获取背景色作为参考值,结合差值均方根设定合理阈值,实现前景的提取,PS上称为蒙版:提取过程中,可能会遇到前景像素丢失的情况,对此可通过开闭运算或者提取外部轮廓线的方式,将前景内部填充完毕
-
OpenCV4 实现背景分离的详细步骤(背景减法模型)
目录 定义: 背景建模包括两个主要步骤: OpenCV中三个背景分离的重要函数 BackgroundSubtractorMOG() BackgroundSubtractorMOG2 BackgroundSubtractorGMG BackgroundSubtractorKNN C++实现: python实现: 利用图像减法函数实现(python版本): 定义: 背景分离,又称背景减法模型. 背景分离(BS)是一种通过使用静态相机来生成前景掩码(即包含属于场景中的移动对象像素的二进制图像)的常用技
-
OpenCV实战之AI照片背景替换
目录 导语 正文 1)附主程序 2)展示其他 总结 导语 不少人在生活中都有抠人像图换背景的需求.那怎么抠图呢? 相信不少人第一时间就想到了 PS 抠图大法,为了学会 PS 抠图很多人还花费不少精力,而且学会后大家想必都有共同感触:PS 抠图在制作抠图选区这个步骤太耗费时间!!就跟我减肥似的! 今天木木子就手把手教大家编写一款抠图人像技术—— 这款小程序实现一键智能抠取人像图的功能,非常强大! 比 PS 慢慢抠图效率可提升了太多了,而且还能让不会 PS 的群体也能轻松学会抠人像图. 吹了这么多,
-
利用OpenCV实现绿幕视频背景替换
目录 前言 一.图像预处理 二.HSV色彩空间转换 1. cvtColor色彩空间转换 2. inRange抠图 三.背景替换 四.源码 总结 前言 本文将使用OpenCV C++ 进行绿幕视频背景替换. 一.图像预处理 背景 绿幕视频 首先,我们需要使用resize API将背景图尺寸修改与视频尺寸大小.这样才能进行后续的像素赋值操作. Mat bg = imread("background.jpg"); //背景图 VideoCapture capture; //读取待处理的绿幕视
-
用Python替换证件照背景颜色
目录 前言 思路: 完整代码 总结 前言 本文教大家通过Python程序替换证件照背景颜色,以后更换证件照背景就不会再苦恼了. 思路: 先去掉原照片的背景颜色 再添上新的背景颜色 步骤很简单,思路清晰,操作起来也很简单,十行代码就可以搞定,保证看完你肯定会! 1.去掉原图背景颜色 import os # 去掉背景颜色 os.system('backgroundremover -i "'+str(in_path)+'" -o "cg_output.jpg"') in_
-
opencv转换颜色空间更改图片背景
本文实例为大家分享了opencv转换颜色空间更改图片背景的具体代码,供大家参考,具体内容如下 思路: 1.将BGR转换为HSV颜色空间 2.设置掩模 3.位运算 这里以更改摩托罗拉logo背景为例,图片在必应图片搜索得知,具体代码如下: import numpy as np import cv2 from imageio import imread import matplotlib.pyplot as plt def show(img,winname = "img"): cv2.na
-
android 仿QQ动态背景、视频背景的示例代码
本文介绍了android 仿QQ动态背景.视频背景的示例代码,分享给大家,具体如下: 效果如下: 如上图类似效果图: 1, 自定义视频类 继承VideoView public class CustomVideoView extends VideoView { public CustomVideoView(Context context) { super(context); } public CustomVideoView(Context context, AttributeSet attrs)
-
pyqt5实现按钮添加背景图片以及背景图片的切换方法
简介 对与控件QPushButton中的可以使用setStyleSheet设置它背景图片.具体设置背景图片的方法有两种 self.button.setStyleSheet("QPushButton{background-image: url(img/1.png)}") 然而对于这种方法背景图片无法进行边框的自适应,可以使用下面的方法 self.button.setStyleSheet("QPushButton{border-image: url(img/1.png)}&quo
-
Android基于opencv实现多通道分离与合并
目录 多通道分离 API 操作 通道合并 API 操作 结果 源码 多通道分离 API public static void split(Mat m, List<Mat> mv) 参数一:m,待分离的多通道图像 参数二:mv,分离后的单通道图像 操作 override fun onCreate(savedInstanceState: Bundle?) { super.onCreate(savedInstanceState) mBinding = DataBindingUtil.setConte