Keras搭建分类网络平台VGG16 MobileNet ResNet50
目录
- 分类网络的常见形式
- 分类网络介绍
- 1、VGG16网络介绍
- 2、MobilenetV1网络介绍
- 3、ResNet50网络介绍
- 分类网络的训练
- 1、LOSS介绍
- 2、利用分类网络进行训练
才发现做了这么多的博客和视频,居然从来没有系统地做过分类网络,做一个科学的分类网络,对身体好。
源码下载
https://github.com/bubbliiiing/classification-keras
分类网络的常见形式
常见的分类网络都可以分为两部分,一部分是特征提取部分,另一部分是分类部分。

特征提取部分的功能是对输入进来的图片进行特征提取,优秀的特征可以帮助更容易区分目标,所以特征提取部分一般由各类卷积组成,卷积拥有强大的特征提取能力;
分类部分会利用特征提取部分获取到的特征进行分类,分类部分一般由全连接组成,特征提取部分获取到的特征一般是一维向量,可以直接进行全连接分类。

通常情况下,特征提取部分就是我们平常了解到的各种神经网络,比如VGG、Mobilenet、Resnet等等;而分类部分就是一次或者几次的全连接,最终我们会获得一个长度为num_classes的一维向量。
分类网络介绍
1、VGG16网络介绍
VGG是由Simonyan 和Zisserman在文献《Very Deep Convolutional Networks for Large Scale Image Recognition》中提出卷积神经网络模型,其名称来源于作者所在的牛津大学视觉几何组(Visual Geometry Group)的缩写。
该模型参加2014年的 ImageNet图像分类与定位挑战赛,取得了优异成绩:在分类任务上排名第二,在定位任务上排名第一。
它的结构如下图所示:

这是一个VGG16被用到烂的图,但确实很好的反应了VGG16的结构,整个VGG16由三种不同的层组成,分别是卷积层、最大池化层、全连接层。
VGG16的具体执行方式如下:
1、一张原始图片被resize到(224,224,3)。
2、conv1:进行两次[3,3]卷积网络,输出的特征层为64,输出为(224,224,64),再进行2X2最大池化,输出net为(112,112,64)。
3、conv2:进行两次[3,3]卷积网络,输出的特征层为128,输出net为(112,112,128),再进行2X2最大池化,输出net为(56,56,128)。
4、conv3:进行三次[3,3]卷积网络,输出的特征层为256,输出net为(56,56,256),再进行2X2最大池化,输出net为(28,28,256)。
5、conv4:进行三次[3,3]卷积网络,输出的特征层为512,输出net为(28,28,512),再进行2X2最大池化,输出net为(14,14,512)。
6、conv5:进行三次[3,3]卷积网络,输出的特征层为512,输出net为(14,14,512),再进行2X2最大池化,输出net为(7,7,512)。
7、对结果进行平铺。
8、进行两次神经元为4096的全连接层。
9、全连接到1000维上,用于进行分类。
最后输出的就是每个类的预测。
实现代码如下:
import warnings
from keras.models import Model
from keras.layers import Input,Activation,Dropout,Reshape,Conv2D,MaxPooling2D,Dense,Flatten
from keras import backend as K
def VGG16(input_shape=None, classes=1000):
img_input = Input(shape=input_shape)
# Block 1
x = Conv2D(64, (3, 3),
activation='relu',
padding='same',
name='block1_conv1')(img_input)
x = Conv2D(64, (3, 3),
activation='relu',
padding='same',
name='block1_conv2')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block1_pool')(x)
# Block 2
x = Conv2D(128, (3, 3),
activation='relu',
padding='same',
name='block2_conv1')(x)
x = Conv2D(128, (3, 3),
activation='relu',
padding='same',
name='block2_conv2')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block2_pool')(x)
# Block 3
x = Conv2D(256, (3, 3),
activation='relu',
padding='same',
name='block3_conv1')(x)
x = Conv2D(256, (3, 3),
activation='relu',
padding='same',
name='block3_conv2')(x)
x = Conv2D(256, (3, 3),
activation='relu',
padding='same',
name='block3_conv3')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block3_pool')(x)
# Block 4
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block4_conv1')(x)
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block4_conv2')(x)
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block4_conv3')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block4_pool')(x)
# Block 5
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block5_conv1')(x)
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block5_conv2')(x)
x = Conv2D(512, (3, 3),
activation='relu',
padding='same',
name='block5_conv3')(x)
x = MaxPooling2D((2, 2), strides=(2, 2), name='block5_pool')(x)
x = Flatten(name='flatten')(x)
x = Dense(4096, activation='relu', name='fc1')(x)
x = Dense(4096, activation='relu', name='fc2')(x)
x = Dense(classes, activation='softmax', name='predictions')(x)
inputs = img_input
model = Model(inputs, x, name='vgg16')
return model
2、MobilenetV1网络介绍
MobilenetV1模型是Google针对手机等嵌入式设备提出的一种轻量级的深层神经网络,其使用的核心思想便是depthwise separable convolution(深度可分离卷积块)。
深度可分离卷积块由两个部分组成,分别是深度可分离卷积和1x1普通卷积,深度可分离卷积的卷积核大小一般是3x3的,便于理解的话我们可以把它当作是特征提取,1x1的普通卷积可以完成通道数的调整。
下图为深度可分离卷积块的结构示意图:

深度可分离卷积块的目的是使用更少的参数来代替普通的3x3卷积。
我们可以进行一下普通卷积和深度可分离卷积块的对比:
对于普通卷积而言,假设有一个3×3大小的卷积层,其输入通道为16、输出通道为32。具体为,32个3×3大小的卷积核会遍历16个通道中的每个数据,最后可得到所需的32个输出通道,所需参数为16×32×3×3=4608个。
对于深度可分离卷积结构块而言,假设有一个深度可分离卷积结构块,其输入通道为16、输出通道为32,其会用16个3×3大小的卷积核分别遍历16通道的数据,得到了16个特征图谱。在融合操作之前,接着用32个1×1大小的卷积核遍历这16个特征图谱,所需参数为16×3×3+16×32×1×1=656个。
可以看出来深度可分离卷积结构块可以减少模型的参数。
深度可分离卷积的代码如下:
def _depthwise_conv_block(inputs, pointwise_conv_filters, alpha,
depth_multiplier=1, strides=(1, 1), block_id=1):
pointwise_conv_filters = int(pointwise_conv_filters * alpha)
x = DepthwiseConv2D((3, 3),
padding='same',
depth_multiplier=depth_multiplier,
strides=strides,
use_bias=False,
name='conv_dw_%d' % block_id)(inputs)
x = BatchNormalization(name='conv_dw_%d_bn' % block_id)(x)
x = Activation(relu6, name='conv_dw_%d_relu' % block_id)(x)
x = Conv2D(pointwise_conv_filters, (1, 1),
padding='same',
use_bias=False,
strides=(1, 1),
name='conv_pw_%d' % block_id)(x)
x = BatchNormalization(name='conv_pw_%d_bn' % block_id)(x)
return Activation(relu6, name='conv_pw_%d_relu' % block_id)(x)
通俗地理解深度可分离卷积结构块,就是3x3的卷积核厚度只有一层,然后在输入张量上一层一层地滑动,每一次卷积完生成一个输出通道,当卷积完成后,在利用1x1的卷积调整厚度。
如下就是MobileNet的结构,其中Conv dw就是深度可分离卷积,在其之后都会接一个1x1的卷积进行通道处理,
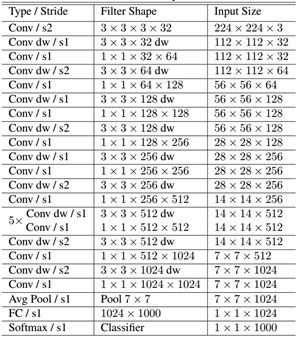
在利用特征提取部分完成输入图片的特征提取后,我们会利用全局平均池化将特征层调整成一个特征长条,我们可以将特征长条进行全连接,获得最终的分类结果。
实现代码如下:
import warnings
from keras.models import Model
from keras.layers import DepthwiseConv2D,Input,Activation,Dropout,Reshape,BatchNormalization,GlobalAveragePooling2D,GlobalMaxPooling2D,Conv2D
from keras import backend as K
def _conv_block(inputs, filters, alpha, kernel=(3, 3), strides=(1, 1)):
filters = int(filters * alpha)
x = Conv2D(filters, kernel,
padding='same',
use_bias=False,
strides=strides,
name='conv1')(inputs)
x = BatchNormalization(name='conv1_bn')(x)
return Activation(relu6, name='conv1_relu')(x)
def _depthwise_conv_block(inputs, pointwise_conv_filters, alpha,
depth_multiplier=1, strides=(1, 1), block_id=1):
pointwise_conv_filters = int(pointwise_conv_filters * alpha)
x = DepthwiseConv2D((3, 3),
padding='same',
depth_multiplier=depth_multiplier,
strides=strides,
use_bias=False,
name='conv_dw_%d' % block_id)(inputs)
x = BatchNormalization(name='conv_dw_%d_bn' % block_id)(x)
x = Activation(relu6, name='conv_dw_%d_relu' % block_id)(x)
x = Conv2D(pointwise_conv_filters, (1, 1),
padding='same',
use_bias=False,
strides=(1, 1),
name='conv_pw_%d' % block_id)(x)
x = BatchNormalization(name='conv_pw_%d_bn' % block_id)(x)
return Activation(relu6, name='conv_pw_%d_relu' % block_id)(x)
def MobileNet(input_shape=None,
alpha=1.0,
depth_multiplier=1,
dropout=1e-3,
classes=1000):
img_input = Input(shape=input_shape)
# 224,224,3 -> 112,112,32
x = _conv_block(img_input, 32, alpha, strides=(2, 2))
# 112,112,32 -> 112,112,64
x = _depthwise_conv_block(x, 64, alpha, depth_multiplier, block_id=1)
# 112,112,64 -> 56,56,128
x = _depthwise_conv_block(x, 128, alpha, depth_multiplier,
strides=(2, 2), block_id=2)
x = _depthwise_conv_block(x, 128, alpha, depth_multiplier, block_id=3)
# 56,56,128 -> 28,28,256
x = _depthwise_conv_block(x, 256, alpha, depth_multiplier,
strides=(2, 2), block_id=4)
x = _depthwise_conv_block(x, 256, alpha, depth_multiplier, block_id=5)
# 28,28,256 -> 14,14,512
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier,
strides=(2, 2), block_id=6)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=7)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=8)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=9)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=10)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=11)
# 14,14,512 -> 7,7,1024
x = _depthwise_conv_block(x, 1024, alpha, depth_multiplier,
strides=(2, 2), block_id=12)
x = _depthwise_conv_block(x, 1024, alpha, depth_multiplier, block_id=13)
# 7,7,1024 -> 1,1,1024
x = GlobalAveragePooling2D()(x)
shape = (1, 1, int(1024 * alpha))
x = Reshape(shape, name='reshape_1')(x)
x = Dropout(dropout, name='dropout')(x)
x = Conv2D(classes, (1, 1),padding='same', name='conv_preds')(x)
x = Activation('softmax', name='act_softmax')(x)
x = Reshape((classes,), name='reshape_2')(x)
inputs = img_input
model = Model(inputs, x, name='mobilenet_%0.2f' % (alpha))
return model
def relu6(x):
return K.relu(x, max_value=6)
if __name__ == '__main__':
model = MobileNet(input_shape=(224, 224, 3))
model.summary()
3、ResNet50网络介绍
a、什么是残差网络
Residual net(残差网络):
将靠前若干层的某一层数据输出直接跳过多层引入到后面数据层的输入部分。
意味着后面的特征层的内容会有一部分由其前面的某一层线性贡献。
其结构如下:
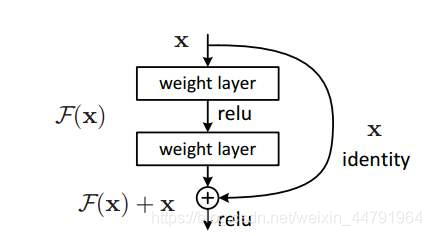
深度残差网络的设计是为了克服由于网络深度加深而产生的学习效率变低与准确率无法有效提升的问题。
b、什么是ResNet50模型
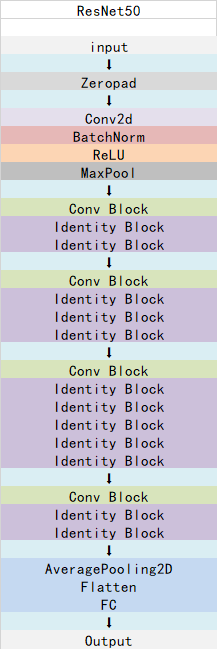
ResNet50有两个基本的块,分别名为Conv Block和Identity Block,其中Conv Block输入和输出的维度是不一样的,所以不能连续串联,它的作用是改变网络的维度;Identity Block输入维度和输出维度相同,可以串联,用于加深网络的。
Conv Block的结构如下,由图可以看出,Conv Block可以分为两个部分,左边部分为主干部分,存在两次卷积、标准化、激活函数和一次卷积、标准化;
右边部分为残差边部分,存在一次卷积、标准化,由于残差边部分存在卷积,所以我们可以利用Conv Block改变输出特征层的宽高和通道数:

实现代码如下:
def conv_block(input_tensor, kernel_size, filters, stage, block, strides=(2, 2)):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
# 降维
x = Conv2D(filters1, (1, 1), strides=strides,
name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
# 3x3卷积
x = Conv2D(filters2, kernel_size, padding='same',
name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
# 升维
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
# 残差边
shortcut = Conv2D(filters3, (1, 1), strides=strides,
name=conv_name_base + '1')(input_tensor)
shortcut = BatchNormalization(name=bn_name_base + '1')(shortcut)
x = layers.add([x, shortcut])
x = Activation('relu')(x)
return x
Identity Block的结构如下,由图可以看出,Identity Block可以分为两个部分,左边部分为主干部分,存在两次卷积、标准化、激活函数和一次卷积、标准化;右边部分为残差边部分,直接与输出相接,由于残差边部分不存在卷积,所以Identity Block的输入特征层和输出特征层的shape是相同的,可用于加深网络:

实现代码如下:
def identity_block(input_tensor, kernel_size, filters, stage, block):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
# 降维
x = Conv2D(filters1, (1, 1), name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
# 3x3卷积
x = Conv2D(filters2, kernel_size,padding='same', name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
# 升维
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x
Conv Block和Identity Block都是残差网络结构。
总的网络结构如下:
实现代码如下:
from __future__ import print_function
import numpy as np
from keras import layers
from keras.layers import Input
from keras.layers import Dense,Conv2D,MaxPooling2D,ZeroPadding2D,AveragePooling2D
from keras.layers import Activation,BatchNormalization,Flatten
from keras.models import Model
def identity_block(input_tensor, kernel_size, filters, stage, block):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
# 降维
x = Conv2D(filters1, (1, 1), name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
# 3x3卷积
x = Conv2D(filters2, kernel_size,padding='same', name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
# 升维
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
x = layers.add([x, input_tensor])
x = Activation('relu')(x)
return x
def conv_block(input_tensor, kernel_size, filters, stage, block, strides=(2, 2)):
filters1, filters2, filters3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
# 降维
x = Conv2D(filters1, (1, 1), strides=strides,
name=conv_name_base + '2a')(input_tensor)
x = BatchNormalization(name=bn_name_base + '2a')(x)
x = Activation('relu')(x)
# 3x3卷积
x = Conv2D(filters2, kernel_size, padding='same',
name=conv_name_base + '2b')(x)
x = BatchNormalization(name=bn_name_base + '2b')(x)
x = Activation('relu')(x)
# 升维
x = Conv2D(filters3, (1, 1), name=conv_name_base + '2c')(x)
x = BatchNormalization(name=bn_name_base + '2c')(x)
# 残差边
shortcut = Conv2D(filters3, (1, 1), strides=strides,
name=conv_name_base + '1')(input_tensor)
shortcut = BatchNormalization(name=bn_name_base + '1')(shortcut)
x = layers.add([x, shortcut])
x = Activation('relu')(x)
return x
def ResNet50(input_shape=[224,224,3], classes=1000):
# 224,224,3
img_input = Input(shape=input_shape)
x = ZeroPadding2D((3, 3))(img_input)
# [112,112,64]
x = Conv2D(64, (7, 7), strides=(2, 2), name='conv1')(x)
x = BatchNormalization(name='bn_conv1')(x)
x = Activation('relu')(x)
x = ZeroPadding2D((1, 1))(x)
# [56,56,64]
x = MaxPooling2D((3, 3), strides=(2, 2))(x)
# [56,56,256]
x = conv_block(x, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1))
x = identity_block(x, 3, [64, 64, 256], stage=2, block='b')
x = identity_block(x, 3, [64, 64, 256], stage=2, block='c')
# [28,28,512]
x = conv_block(x, 3, [128, 128, 512], stage=3, block='a')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='b')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='c')
x = identity_block(x, 3, [128, 128, 512], stage=3, block='d')
# [14,14,1024]
x = conv_block(x, 3, [256, 256, 1024], stage=4, block='a')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='b')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='c')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='d')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='e')
x = identity_block(x, 3, [256, 256, 1024], stage=4, block='f')
# [7,7,2048]
x = conv_block(x, 3, [512, 512, 2048], stage=5, block='a')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='b')
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='c')
# 代替全连接层
x = AveragePooling2D((7, 7), name='avg_pool')(x)
# 进行预测
x = Flatten()(x)
x = Dense(classes, activation='softmax', name='fc1000')(x)
model = Model(img_input, x, name='resnet50')
return model
if __name__ == '__main__':
model = ResNet50()
model.summary()
分类网络的训练
1、LOSS介绍
一般而言,分类网络所使用的损失函数为交叉熵损失函数,英文名为Cross Entropy,实现公式如下。

其中:

2、利用分类网络进行训练
首先前往Github下载对应的仓库,下载完后利用解压软件解压,之后用编程软件打开文件夹。
注意打开的根目录必须正确,否则相对目录不正确的情况下,代码将无法运行。
一定要注意打开后的根目录是文件存放的目录。
a、数据集的准备
datasets文件夹下存放的是训练图片,分为两部分,train里面是训练图片,test里面是测试图片。

在训练之前需要首先准备好数据集,数据集格式为在train和test文件夹下分不同的文件夹,每个文件夹的名称为对应的类别名称,文件夹下面的图片为这个类的图片。


b、数据集的处理
在准备好数据集后,需要在根目录运行txt_annotation.py生成训练所需的cls_train.txt。
运行前需要修改其中的classes,将其修改成自己需要分的类。

c、开始网络训练
通过txt_annotation.py我们已经生成了cls_train.txt以及cls_test.txt,此时我们可以开始训练了。
训练的参数较多,大家可以在下载库后仔细看注释,其中最重要的部分是修改model_data文件夹下的cls_classes.txt,使其也对应自己需要分的类。

在train.py里面调整自己要选择的网络和权重后,就可以开始训练了!

以上就是Keras搭建分类网络平台VGG16 MobileNet ResNet50的详细内容,更多关于Keras搭建分类网络平台的资料请关注我们其它相关文章!
相关推荐
-
在Keras中CNN联合LSTM进行分类实例
我就废话不多说,大家还是直接看代码吧~ def get_model(): n_classes = 6 inp=Input(shape=(40, 80)) reshape=Reshape((1,40,80))(inp) # pre=ZeroPadding2D(padding=(1, 1))(reshape) # 1 conv1=Convolution2D(32, 3, 3, border_mode='same',init='glorot_uniform')(reshape) #model.add(
-
Keras中的多分类损失函数用法categorical_crossentropy
from keras.utils.np_utils import to_categorical 注意:当使用categorical_crossentropy损失函数时,你的标签应为多类模式,例如如果你有10个类别,每一个样本的标签应该是一个10维的向量,该向量在对应有值的索引位置为1其余为0. 可以使用这个方法进行转换: from keras.utils.np_utils import to_categorical categorical_labels = to_categorical(int_
-
Python实现Keras搭建神经网络训练分类模型教程
我就废话不多说了,大家还是直接看代码吧~ 注释讲解版: # Classifier example import numpy as np # for reproducibility np.random.seed(1337) # from keras.datasets import mnist from keras.utils import np_utils from keras.models import Sequential from keras.layers import Dense, Act
-
使用Keras预训练模型ResNet50进行图像分类方式
Keras提供了一些用ImageNet训练过的模型:Xception,VGG16,VGG19,ResNet50,InceptionV3.在使用这些模型的时候,有一个参数include_top表示是否包含模型顶部的全连接层,如果包含,则可以将图像分为ImageNet中的1000类,如果不包含,则可以利用这些参数来做一些定制的事情. 在运行时自动下载有可能会失败,需要去网站中手动下载,放在"~/.keras/models/"中,使用WinPython则在"settings/.ke
-
python神经网络学习使用Keras进行简单分类
目录 学习前言 Keras中分类的重要函数 1.np_utils.to_categorical 2.Activation 3.metrics=[‘accuracy’] 全部代码 学习前言 上一步讲了如何构建回归算法,这一次将怎么进行简单分类. Keras中分类的重要函数 1.np_utils.to_categorical np_utils.to_categorical用于将标签转化为形如(nb_samples, nb_classes)的二值序列. 假设num_classes = 10. 如将[1
-
keras实现多种分类网络的方式
Keras应该是最简单的一种深度学习框架了,入门非常的简单. 简单记录一下keras实现多种分类网络:如AlexNet.Vgg.ResNet 采用kaggle猫狗大战的数据作为数据集. 由于AlexNet采用的是LRN标准化,Keras没有内置函数实现,这里用batchNormalization代替 收件建立一个model.py的文件,里面存放着alexnet,vgg两种模型,直接导入就可以了 #coding=utf-8 from keras.models import Sequential f
-

Keras搭建分类网络平台VGG16 MobileNet ResNet50
目录 分类网络的常见形式 分类网络介绍 1.VGG16网络介绍 2.MobilenetV1网络介绍 3.ResNet50网络介绍 分类网络的训练 1.LOSS介绍 2.利用分类网络进行训练 才发现做了这么多的博客和视频,居然从来没有系统地做过分类网络,做一个科学的分类网络,对身体好. 源码下载 https://github.com/bubbliiiing/classification-keras 分类网络的常见形式 常见的分类网络都可以分为两部分,一部分是特征提取部分,另一部分是分类部分. 特征
-
浅谈keras使用预训练模型vgg16分类,损失和准确度不变
问题keras使用预训练模型vgg16分类,损失和准确度不变. 细节:使用keras训练一个两类数据,正负比例1:3,在vgg16后添加了几个全链接并初始化了.并且对所有层都允许训练. 但是准确度一直是0.75. 数据预先处理已经检查过格式正确 再将模型中relu改成sigmoid就正常了. 数据处理程序 import os import pickle import numpy as np import DataFile import SelectiveSearch import Generat
-
Keras搭建M2Det目标检测平台示例
目录 什么是M2det目标检测算法 M2det实现思路 一.预测部分 1.主干网络介绍 2.FFM1特征初步融合 3.细化U型模块TUM 4.FFM2特征加强融合 5.注意力机制模块SFAM 6.从特征获取预测结果 7.预测结果的解码 8.在原图上进行绘制 二.训练部分 1.真实框的处理 2.利用处理完的真实框与对应图片的预测结果计算loss 训练自己的M2Det模型 一.数据集的准备 二.数据集的处理 三.开始网络训练 四.训练结果预测 什么是M2det目标检测算法 一起来看看M2det的ke
-
python神经网络Keras搭建RFBnet目标检测平台
目录 什么是RFBnet目标检测算法 RFBnet实现思路 一.预测部分 1.主干网络介绍 2.从特征获取预测结果 3.预测结果的解码 4.在原图上进行绘制 二.训练部分 1.真实框的处理 2.利用处理完的真实框与对应图片的预测结果计算loss 训练自己的RFB模型 一.数据集的准备 二.数据集的处理 三.开始网络训练 四.训练结果预测 什么是RFBnet目标检测算法 RFBnet是SSD的一种加强版,主要是利用了膨胀卷积这一方法增大了感受野,相比于普通的ssd,RFBnet也是一种加强吧 RF
-
Keras搭建Efficientdet目标检测平台的实现思路
学习前言 一起来看看Efficientdet的keras实现吧,顺便训练一下自己的数据. 什么是Efficientdet目标检测算法 最近,谷歌大脑 Mingxing Tan.Ruoming Pang 和 Quoc V. Le 提出新架构 EfficientDet,结合 EfficientNet(同样来自该团队)和新提出的 BiFPN,实现新的 SOTA 结果. 源码下载 https://github.com/bubbliiiing/efficientdet-keras 喜欢的可以点个star噢
-
Keras搭建孪生神经网络Siamese network比较图片相似性
目录 什么是孪生神经网络 孪生神经网络的实现思路 一.预测部分 1.主干网络介绍 2.比较网络 二.训练部分 1.数据集的格式 2.Loss计算 训练自己的孪生神经网络 1.训练本文所使用的Omniglot例子 2.训练自己相似性比较的模型 什么是孪生神经网络 最近学习了一下如何比较两张图片的相似性,用到了孪生神经网络,一起来学习一下. 简单来说,孪生神经网络(Siamese network)就是“连体的神经网络”,神经网络的“连体”是通过共享权值来实现的,如下图所示. 所谓权值共享就是当神经网
-
Keras搭建Mask R-CNN实例分割平台实现源码
目录 什么是Mask R-CNN Mask R-CNN实现思路 一.预测部分 1.主干网络介绍 2.特征金字塔FPN的构建 3.获得Proposal建议框 4.Proposal建议框的解码 5.对Proposal建议框加以利用(Roi Align) 6.预测框的解码 7.mask语义分割信息的获取 二.训练部分 1.建议框网络的训练 2.Classiffier模型的训练 3.mask模型的训练 训练自己的Mask-RCNN模型 1.数据集准备 2.参数修改 3.模型训练 什么是Mask R-CN
-
Pytorch 搭建分类回归神经网络并用GPU进行加速的例子
分类网络 import torch import torch.nn.functional as F from torch.autograd import Variable import matplotlib.pyplot as plt # 构造数据 n_data = torch.ones(100, 2) x0 = torch.normal(3*n_data, 1) x1 = torch.normal(-3*n_data, 1) # 标记为y0=0,y1=1两类标签 y0 = torch.zero
-
Keras搭建自编码器操作
简介: 传统机器学习任务任务很大程度上依赖于好的特征工程,但是特征工程往往耗时耗力,在视频.语音和视频中提取到有效特征就更难了,工程师必须在这些领域有非常深入的理解,并且需要使用专业算法提取这些数据的特征.深度学习则可以解决人工难以提取有效特征的问题,大大缓解机器学习模型对特征工程的依赖. 深度学习在早期一度被认为是一种无监督的特征学习过程,模仿人脑对特征逐层抽象的过程.这其中两点很重要:一是无监督学习:二是逐层训练.例如在图像识别问题中,假定我们有许多汽车图片,要如何利用计算机进行识别任务呢?