C++利用Opencv实现多个圆形检测
主要是利用霍夫圆检测、面积筛选等完成多个圆形检测,具体代码及结果如下。
第一部分是头文件(common.h):
#pragma once #include<opencv2/opencv.hpp> #include<opencv2/highgui.hpp> #include<iostream> using namespace std; using namespace cv; extern Mat src; void imageBasicInformation(Mat& src);//图像基本信息 const Mat houghCirclePre(Mat& srcPre);//霍夫圆检测预处理 void houghCircle(Mat& srcPreHough);//霍夫圆检测 const Mat RectCirclePre(Mat& srcPre);//面积筛选拟合圆的预处理 void AreaCircles(Mat& AreaInput);//面积筛选拟合圆检测
第二部分是主函数:
#include"common.h"
Mat src;
int main()
{
src = imread("1.jpg",1);
if (src.empty())
{
cout << "图像不存在!" << endl;
}
else
{
namedWindow("原图", 1);
imshow("原图", src);
imageBasicInformation(src);
Mat srcPreHough = houghCirclePre(src);
houghCircle(srcPreHough);
Mat RectCir = RectCirclePre(src);
AreaCircles(RectCir);
waitKey(0);
destroyAllWindows();
}
return 0;
}
第三部分为霍夫圆检测函数(hough.cpp)
主要包括输出图像的基本信息函数:void imageBasicInformation(Mat& src)
霍夫圆检测预处理函数:const Mat houghCirclePre(Mat& srcPre)
霍夫圆检测函数:void houghCircle(Mat& srcPreHough)
#include"common.h"
Mat graySrc, srcPre;//灰度图,霍夫检测预处理,
Mat threshold_grayaSrc;//二值化图
Mat erode_threshold_graySrc, dilate_threshold_graySrc;//二值化后腐蚀,二值化后膨胀
void imageBasicInformation(Mat& src)
{
int cols = src.cols;
int rows = src.rows;
int channels = src.channels();
cout << "图像宽为:" << cols << endl;
cout << "图像高为:" << rows << endl;
cout << "图像通道数:" << channels << endl;
}
const Mat houghCirclePre(Mat& srcPre)
{
double houghCirclePreTime = static_cast<double>(getTickCount());
cvtColor(srcPre, graySrc, COLOR_BGR2GRAY);
GaussianBlur(graySrc, graySrc, Size(3, 3), 2, 2);//滤波
threshold(graySrc, threshold_grayaSrc, 150, 255, 1);//二值化
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15));
dilate(threshold_grayaSrc, dilate_threshold_graySrc, element);//膨胀
erode(dilate_threshold_graySrc, erode_threshold_graySrc, element);//腐蚀
houghCirclePreTime = ((double)getTickCount() - houghCirclePreTime) / getTickFrequency();
cout << "霍夫圆预处理时间为:" << houghCirclePreTime << "秒" << endl;
return erode_threshold_graySrc;
}
void houghCircle(Mat& srcPreHough)
{
cout << "进入霍夫圆检测" << endl;
vector<Vec3f> circles;
HoughCircles(srcPreHough, circles, HOUGH_GRADIENT, 1, 60, 1, 35, 0, 0);
cout << "圆的个数" << circles.size() << endl;
for (size_t i = 0;i < circles.size();i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0);//画圆心
circle(src, center, radius, Scalar(0, 0, 255), 3, 8, 0);//画圆
}
namedWindow("霍夫检测结果", 0);
imshow("霍夫检测结果", src);
imwrite("霍夫圆检测结果.jpg", src);//保存检测结果
}
第四部分为利用面积筛选拟合圆检测(AreaCircle.cpp)
主要包括预处理函数:const Mat RectCirclePre(Mat& srcPre)
面积筛选拟合圆检测函数:void AreaCircles(Mat& AreaInput)
#include"common.h"
Mat graySrcArea, thresholdGraySrc;//灰度图像,二值化图像
Mat dilateThresholdGraySrc, erodeThresholdGraySrc;//二值化后膨胀图像,膨胀之后的腐蚀图像
const Mat RectCirclePre(Mat& srcPre)
{
cvtColor(srcPre, graySrcArea, COLOR_BGR2GRAY);
GaussianBlur(graySrcArea, graySrcArea, Size(3, 3), 2, 2);
threshold(graySrcArea, thresholdGraySrc, 100, 255, 1);//二值化,阈值要根据自己的图像自己调整
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15));
dilate(thresholdGraySrc, dilateThresholdGraySrc, element);//膨胀
erode(dilateThresholdGraySrc, erodeThresholdGraySrc, element);//腐蚀
return erodeThresholdGraySrc;
}
void AreaCircles(Mat& AreaInput)
{
vector<vector<Point>> RectContours;
vector<Vec4i> Hierarchy;
findContours(AreaInput, RectContours, Hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat drawing = Mat::zeros(src.size(), CV_8UC3);
for (int i = 0;i < RectContours.size();i++)
{
double area = contourArea(RectContours[i]);
cout << area << endl;//输出所有计算出来的面积,方便下一步设置阈值
if (area > 15000 && area < 100000)//根据上一步计算的阈值设置范围
{
drawContours(drawing, RectContours, i, Scalar(0, 255, 0), 2,8, Hierarchy, 0, Point());
RotatedRect Rect = fitEllipse(RectContours[i]);
circle(src, Rect.center, 2, Scalar(0, 255, 0), 2, 8, 0);//在原图画出圆心
ellipse(src, Rect, Scalar(0, 0, 255), 2);//在原图画出轮廓
}
}
namedWindow("面积筛选拟合圆", 0);
imshow("面积筛选拟合圆", src);
imwrite("面积筛选拟合圆.jpg", src);//保存检测结果
}
结果如下(自己画的两个圆):
原图:

以下为霍夫圆检测结果:
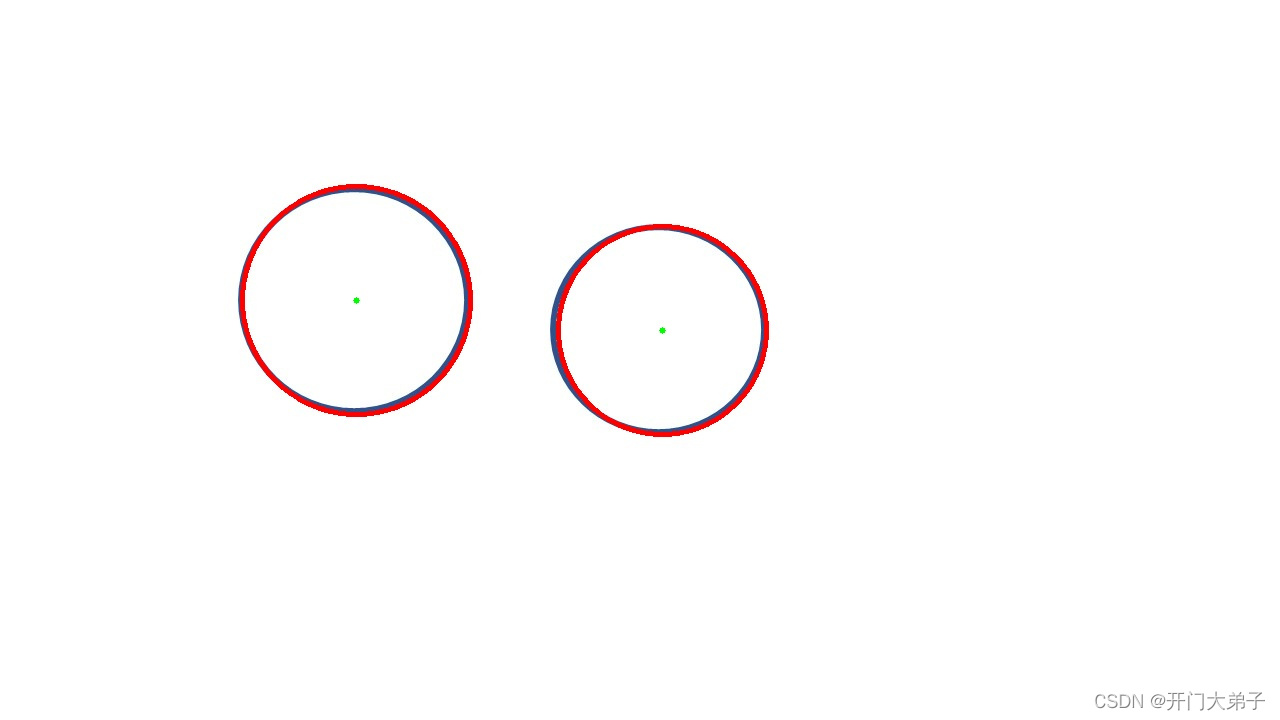
以下为面积筛选拟合圆结果:

到此这篇关于C++利用Opencv实现多个圆形检测的文章就介绍到这了,更多相关C++ Opencv圆形检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
opencv3/C++ 实现SURF特征检测
SURF即Speeded Up Robust Features加速鲁棒特征: SURF可以用于对象定位和识别.人脸识别.3D重建.对象跟踪和提取兴趣点等. 工作原理: 1.选择图像中POI(Points of Interest) Hessian Matrix; 2.在不同的尺度空间发现关键点,非最大信号压制; 3.发现特征点方法.旋转不变性要求; 4.生成特征向量; 类SURF中成员函数create()参数说明: static Ptr<SURF> create( double hessianT
-

C++ OpenCV实战之车道检测
目录 前言 一.获取车道ROI区域 二.车道检测 1.灰度.阈值 2.获取非零像素点 3.绘制车道线 总结 前言 本文将使用OpenCV C++ 进行车道检测. 一.获取车道ROI区域 原图如图所示. 使用下面代码段获取ROI区域.该ROI区域点集根据图像特征自己设定.通过fillPoly填充ROI区域,最终通过copyTo在原图中扣出ROI. void GetROI(Mat src, Mat &image) { Mat mask = Mat::zeros(src.size(), src
-
C++利用opencv实现人脸检测
小编所有的帖子都是基于unbuntu系统的,当然稍作修改同样试用于windows的,经过小编的绞尽脑汁,把刚刚发的那篇python 实现人脸和眼睛的检测的程序用C++ 实现了,当然,也参考了不少大神的博客,下面我们就一起来看看: Linux系统下安装opencv我就再啰嗦一次,防止有些人没有安装没调试出来喷小编的程序是个坑, sudo apt-get install libcv-dev sudo apt-get install libopencv-dev 看看你的usr/share/opencv
-
C++ OpenCV实战之标记点检测的实现
在实际应用中,能够直接利用霍夫圆检测这些理想方法的应用场景是非常少的,更多的是利用拟合的办法去寻找圆形. 大致思路如下,首先先选择要处理的ROI部分,记录下该图的左上点在原图的坐标,如果原图过大,要先进行等比例缩放:然后利用自适应阈值和Canny边缘提取进行处理,再进行闭运算与轮廓检测,计算点集面积,通过筛选面积阈值去除杂点,最后进行轮廓检测,拟合椭圆,效果如下: 1.导入原图: 2.截取ROI 3.进行自适应阈值化与Canny边缘提取 4.进行闭运算,然后轮廓检测,然后计算点集面积,通过面积阈
-
opencv3/C++实现霍夫圆/直线检测
霍夫直线检测 参数说明: cv::HoughLinesP( InputArray src, // 输入图像(8位灰度图像) OutputArray lines, // 输出直线两点坐标(vector<Vec4i>) double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长(一般取CV_PI/180) int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线 double minLineLength=0;//
-
C++ OpenCV实战之网孔检测的实现
目录 前言 一.HSV通道转换 二.图像修复 2.1 OpenCV函数实现 2.2 MyFunction 三.轮廓提取 四.效果显示 五.源码 总结 前言 前段时间,有位粉丝私信我,给我发了一张图片,如下图所示: 在这里贴出他的原话. 从他给的图片分析,该图存在遮挡,所以不能简单的二值化,然后提取图像轮廓去寻找结果.所以,我就想如何去掉这些遮挡物(即图像修复).从图像可知,该遮挡物是黄色的线,所以,我就想可否使用hsv色彩空间提取出黄色,然后得到二值掩模图像,最后对原图进行修复.接下来,就一起看
-
C++ opencv霍夫圆检测使用案例详解
本程序是一个最简单的霍夫圆检测函数的使用案例,刚刚学会的用法,发一下,可以参考,参数啥的可根据图片调节. #pragma once #include<quickopencv.h> #include<vector> #include <stdio.h> #include <iostream> #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgpr
-
C++ OpenCV实现二维码检测功能
目录 前言 一.二维码检测 二.二维码识别 三.二维码绘制 四.源码 总结 前言 本文将使用OpenCV C++ 进行二维码检测. 一.二维码检测 首先我们要先将图像进行预处理,通过灰度.滤波.二值化等操作提取出图像轮廓.在这里我还添加了形态学操作,消除噪点,有效将矩形区域连接起来. Mat gray; cvtColor(src, gray, COLOR_BGR2GRAY); Mat blur; GaussianBlur(gray, blur, Size(3, 3), 0); Mat bin;
-
C++ opencv图像处理实现图片边缘检测示例
目录 边缘检测简介 一.边缘检测步骤 二.Canny 1.函数 2.代码 二.Sobel 1.函数 2.代码 三.Scharr 1.函数 2.代码 四.Laplacian 1.函数 2.代码 总结 边缘检测简介 边缘检测是图像处理和计算机视觉中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点. 图像边缘检测大幅度地减少了数据量,并且剔除量不相关的信息,保留了图像重要的结构属性. 一.边缘检测步骤 1.图像获取 2.图像滤波 3.图像增强 4.图像检测 5.图像定位 二.Canny 1.
-
C++利用Opencv实现多个圆形检测
主要是利用霍夫圆检测.面积筛选等完成多个圆形检测,具体代码及结果如下. 第一部分是头文件(common.h): #pragma once #include<opencv2/opencv.hpp> #include<opencv2/highgui.hpp> #include<iostream> using namespace std; using namespace cv; extern Mat src; void imageBasicInformation(Mat&am
-
如何基于OpenCV&Python实现霍夫变换圆形检测
简述 基于python使用opencv实现在一张图片中检测出圆形,并且根据坐标和半径标记出圆.不涉及理论,只讲应用. 霍夫变换检测圆形的原理 其实检测圆形和检测直线的原理差别不大,只不过直线是在二维空间,因为y=kx+b,只有k和b两个自由度.而圆形的一般性方程表示为(x-a)²+(y-b)²=r².那么就有三个自由度圆心坐标a,b,和半径r.这就意味着需要更多的计算量,而OpenCV中提供的cvHoughCircle()函数里面可以设定半径r的取值范围,相当于有一个先验设定,在每一个r来说,在
-
Python+OpenCV实现图片中的圆形检测
效果展示 中心的三个没检测到 import cv2 import numpy as np import matplotlib.pyplot as plt w = 20 h = 5 params = cv2.SimpleBlobDetector_Params() # Setup SimpleBlobDetector parameters. print('params') print(params) print(type(params)) # Filter by Area. params.filte
-
python利用opencv调用摄像头实现目标检测
目录 使用到的库 实现思路 实现代码 2020/4/26更新:FPS计算 FPS记录的原理 FPS实现代码 使用到的库 好多人都想了解一下如何对摄像头进行调用,然后进行目标检测,于是我做了这个小BLOG. opencv-python==4.1.2.30 Pillow==6.2.1 numpy==1.17.4 这些都是通用的库,版本不同问题应该也不大. 实现思路 利用opencv调用摄像头,读取每一帧传入目标检测网络检测,将检测结果呈现. 由于本文所用的检测格式为RGB格式,CV2读取的时候会使用
-
利用Opencv中Houghline方法实现直线检测
利用Opencv中的Houghline方法进行直线检测-python语言 这是给Python部落翻译的文章,请在这里看原文. 在图像处理中,霍夫变换用来检测任意能够用数学公式表达的形状,即使这个形状被破坏或者有点扭曲. 下面我们将看到利用HoughLine算法来阐述霍夫变化进行直线检测的原理,把此算法应用到特点图像的边缘检测是可取的.边缘检测方法请参考这篇文章–边缘检测. Houghline算法基础 直线可以表示为y=mx+c,或者以极坐标形式表示为r=xcosθ+ysinθ,其中r是原点到直线
-
python利用opencv实现颜色检测
本文实例为大家分享了python利用opencv实现颜色检测的具体代码,供大家参考,具体内容如下 需要实现倒车辅助标记检测的功能,倒车辅助标记颜色已经确定了,所以不需要使用深度学习的方法,那样成本太高了,直接可以使用颜色检测的方法. 1.首先需要确定待检测目标的HSV值 import cv2 img = cv2.imread('l3.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) hsv = cv2.cvtColor(img, cv2.COL
-
Android 利用OpenCV制作人脸检测APP
目录 前言 第一步:下载并安装Android studio 第二步:下载SDK tools 第三步:新建一个Android APP项目 第四步:下载Opencv 第五步:导入OpenCV 第六步:添加代码 第七步:连接手机运行程序 前言 本篇文章手把手教大家使用OpenCV来实现一个能在安卓手机上运行的人脸检测APP.其实不仅仅是能检测人脸,还能检测鼻子,嘴巴,眼睛和耳朵.花了不少精力写这篇文章,希望点赞收藏关注. 无图无真相,先把APP运行的结果给大家看看. 如上图所示,APP运行后,点击"选
-
利用OpenCV实现YOLO对象检测方法详解
目录 前言 什么是YOLO物体检测器? 项目结构 检测图像 检测视频 前言 本文将教你如何使用YOLOV3对象检测器.OpenCV和Python实现对图像和视频流的检测.用到的文件有yolov3.weights.yolov3.cfg.coco.names,这三个文件的github链接如下: GitHub - pjreddie/darknet: Convolutional Neural Networks https://pjreddie.com/media/files/yolov3.weights
-
Android 利用OpenCV制作人脸检测APP
目录 前言 第一步:下载并安装Android studio 第二步:下载SDK tools 第三步:新建一个Android APP项目 第四步:下载Opencv 第五步:导入OpenCV 第六步:添加代码 第七步:连接手机运行程序 前言 本篇文章手把手教大家使用OpenCV来实现一个能在安卓手机上运行的人脸检测APP.其实不仅仅是能检测人脸,还能检测鼻子,嘴巴,眼睛和耳朵.花了不少精力写这篇文章,希望点赞收藏关注. 无图无真相,先把APP运行的结果给大家看看. 如上图所示,APP运行后,点击"选
-
Python使用Opencv实现边缘检测以及轮廓检测的实现
边缘检测 Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化. Canny边缘检测器算法基本步骤: 平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声. 计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直.水平和斜对角.这一步的输出用于在下一步中计算真正的边缘. 非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于