FreeRTOS实时操作系统移植操作示例指南
目录
- 1.添加FreeRTOS源码
- 2.向工程分组中添加文件
- 附上delay.c和delay.h的代码
1.添加FreeRTOS源码
在基础工程中新建一个名为 FreeRTOS 的文件夹,将 FreeRTOS 的源码(source文件夹下的内容)添加到这个文件夹中
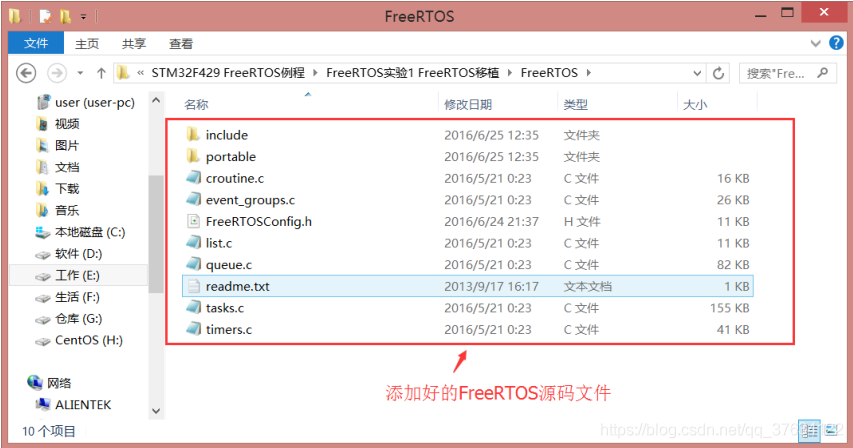
portable文件夹中,只需留下 keil、MemMang 和 RVDS这三个文件夹,其他的都可以删除掉。
2.向工程分组中添加文件
打开基础工程,新建分组 FreeRTOS_CORE 和 FreeRTOS_PORTABLE,然后向这两个分组中添加文件
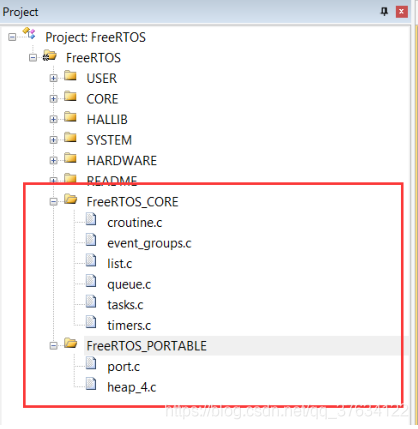
port.c 是 RVDS 文件夹下的 ARM_CM4F 中的文件,因为 STM32F429 是 Cortex-M4 内核并且带有 FPU,因此要选择 ARM_CM4F 中的 port.c 文件。heap_4.c 是 MemMang 文件夹中的,MemMang 文件夹中的五个内存管理方案后面再讲。
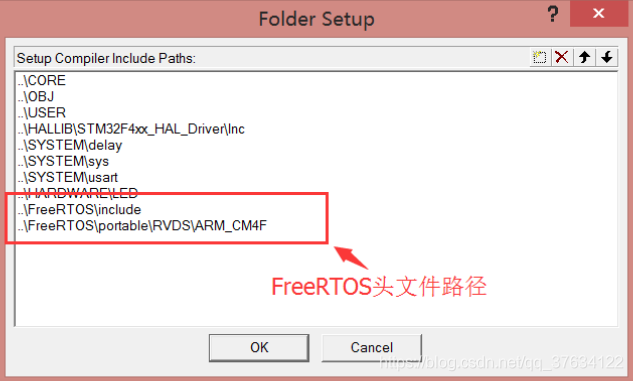
添加完 FreeRTOS 源码中的 C 文件以后再添加 FreeRTOS 源码的头文件路径。
编译后发现,缺少“FreeRTOSConfig.h”这个文件,这可文件可以去FreeRTOS的官方Demo中拷贝一份过来。本人已经对其做了相应的修改,并注释好,里面的内容我将在下一章贴上并对其进行相应的注解。
然后,由于FreeRTOS已经帮我们实现了PendSV_Handler()和SVC_Handler()函数,所以我们在stm32f4xx_it.c中注释掉这两个函数。而SysTickHandler()这个函数我们不需要FreeRTOS帮我们实现,而是我们自行在delay.c中实现,
附上delay.c和delay.h的代码
#include "delay.h"
#include "FreeRTOS.h"
#include "task.h"
extern void xPortSysTickHandler(void);
void SysTick_Handler(void)
{
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数
void delay_init()
{
u32 reload;
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK);
fac_us=SystemCoreClock/1000000; //系统还没运行,以Systick计时
reload=SystemCoreClock/configTICK_RATE_HZ; //configTICK_RATE_HZ=1000
fac_ms=1000/configTICK_RATE_HZ; //系统已经运行,这就是个节拍数,用于给系统提供的延迟函数
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//开启SYSTICK中断
SysTick->LOAD=reload; //每1/configTICK_RATE_HZ断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
}
//延迟us,不会引起任务切换
//注意:nus的值,不要大于23860929us(最大值即2^32/fac_us@fac_us=180)
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
}
//延时nms,其实就是对会vTaskDelay的简单封装,会引起任务调度
//nms:要延时的ms数
//nms:0~65535
void delay_ms(u32 nms)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系统已经运行
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
vTaskDelay(nms); //FreeRTOS延时:vTaskDelay演示固定的时钟节拍,由于前面设定了频率为1000HZ,所以一个节拍就是1ms
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
//延时nms,不会引起任务切换
//nms:要延时的ms数
void delay_xms(u32 nms)
{
u32 i;
for(i=0;i<nms;i++) delay_us(1000);
}
//延时ms:不会引起任务切换
//注意nms的范围
//SysTick->LOAD为24位寄存器
//对180M条件下,nms<=23860ms (最大值即2^32/fac_ms@fac_ms=180*1000)
/*void delay_ms(u16 nms)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nms*fac_ms; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
}*/
以上就是FreeRTOS移植操作示例指南的详细内容,更多关于FreeRTOS移植的资料请关注我们其它相关文章!
相关推荐
-

C语言 Freertos的递归锁详解
目录 1.死锁的概念 2.自我死锁 3.递归锁 4.代码 5.运行流程分析 6.运行结果 总结 1.死锁的概念 假设有 2 个互斥量 M1. M2, 2 个任务 A. B: A 获得了互斥量 M1 B 获得了互斥量 M2 A 还要获得互斥量 M2 才能运行,结果 A 阻塞 B 还要获得互斥量 M1 才能运行,结果 B 阻塞 A. B 都阻塞,再无法释放它们持有的互斥量 死锁发生! 2.自我死锁 任务 A 获得了互斥锁 M 它调用一个函数 函数要去获取同一个互斥锁 M,于是它阻塞:任务 A 休眠,
-
freertos实时操作系统空闲任务阻塞延时示例解析
阻塞态:如果一个任务当前正在等待某个外部事件,则称它处于阻塞态. rtos中的延时叫阻塞延时,即任务需要延时的时候,会放弃CPU的使用权,进入阻塞状态.在任务阻塞的这段时间,CPU可以去执行其它的任务(如果其它的任务也在延时状态,那么 CPU 就将运行空闲任务),当任务延时时间到,重新获取 CPU 使用权,任务继续运行. 空闲任务:处理器空闲的时候,运行的任务.当系统中没有其他就绪任务时,空闲任务开始运行,空闲任务的优先级是最低的. 空闲任务 定义空闲任务: #define portSTACK_
-
FreeRTOS操作系统的配置示例解析
目录 1. FreeRTOSConfig.h 文件 2. “INCLUDE_” 开始的宏 3.“config”开始的宏 FreeRTOS 的系统配置文件为 FreeRTOSConfig.h,在此配置文件中可以完成 FreeRTOS 的裁剪和配置. 1. FreeRTOSConfig.h 文件 FreeRTOS 的配置基本是通过在 FreeRTOSConfig.h 中使用“#define”这样的语句来定义宏定义实现的.在 FreeRTOS 的官方 demo 中,每个工程都有一个 FreeRTOS
-
FreeRTOS实时操作系统临界段保护场合示例
目录 临界段保护场合 非中断场合 中断场合 临界段保护场合 FreeRTOS中临界段保护有2种场合,中断和非中断,通过关中断(或者关部分中断)来实现临界保护. 非中断场合 task.h 中 #define taskENTER_CRITICAL()portENTER_CRITICAL() #define taskEXIT_CRITICAL()portEXIT_CRITICAL() portmacro.h中 #define portENTER_CRITICAL()vPortEnterCritical
-
FreeRTOS实时操作系统特点介绍
目录 1.什么是FreeRTOS? 2.为什么择 选择 FreeRTOS ? 3.FreeRTOS 特点 FreeRTOS资料与源码下载 FreeRTOS源码文件介绍 1.什么是FreeRTOS? Free 即免费的,RTOS 全称是 Real Time Operating System,中文就是实时操作系统.注意,RTOS 不是指某一个确定的系统,而是指一类系统.比如 uC/OS,FreeRTOS,RTX,RT-Thread 等这些都是 RTOS 类操作系统. 操作系统允许多个任务同时运行,这
-
FreeRTOS实时操作系统结构示例
目录 1.查找相关文档页 2.获取RTOS源代码 3.FreeRTOS源码目录结构 移植层目录举例: 演示例程目录举例: 4.编译工程 5.运行演示例程 FreeRTOS可以被移植到很多不同架构的处理器和编译器.每一个RTOS移植都附带一个已经配置好的演示例程,可以方便快速启动开发.更好的是,每个演示例程都附带一个说明网页,提供如何定位RTOS演示工程源代码.如何编译演示例程.如何配置硬件平台的全部信息. 演示例程说明网页还提供基本的RTOS移植细节信息,包括如何编写FreeRTOS兼容的中断服
-
FreeRTOS实时操作系统移植操作示例指南
目录 1.添加FreeRTOS源码 2.向工程分组中添加文件 附上delay.c和delay.h的代码 1.添加FreeRTOS源码 在基础工程中新建一个名为 FreeRTOS 的文件夹,将 FreeRTOS 的源码(source文件夹下的内容)添加到这个文件夹中 portable文件夹中,只需留下 keil.MemMang 和 RVDS这三个文件夹,其他的都可以删除掉. 2.向工程分组中添加文件 打开基础工程,新建分组 FreeRTOS_CORE 和 FreeRTOS_PORTABLE,然后向
-
FreeRTOS实时操作系统支持时间片示例详解
目录 什么是时间片 时间片实现关键 taskSELECT_HIGHEST_PRIORITY_TASK() taskRESET_READY_PRIORITY() 什么是时间片 时间片就是同一个优先级下可以有多个任务,每个任务轮流地享有相同的 CPU 时间, 享有 CPU 的时间我们叫时间片.在 RTOS 中,最小的时间单位为一个 tick,即 SysTick 的中断周期,与其说 FreeRTOS 支持时间片,倒不如说它的时间片就是正常的任务调度. 时间片实现关键 时间片实现关键在这两个宏. tas
-
FreeRTOS实时操作系统的内核控制示例解析
目录 前言 1.强制上下文切换宏 2.进入临界区宏 3.退出临界区宏 4.禁止可屏蔽中断宏 5.使能可屏蔽中断宏 6.启动调度器 6.1函数描述 7.停止调度器 7.1函数描述 8.挂起调度器 8.1函数描述 9.恢复被挂起的调度器 9.1函数描述 9.2返回值 9.3用法举例 10.调整系统节拍 10.1函数描述 10.2参数描述 10.3用法举例 前言 内核控制的一些功能需要移植层提供,为了方便移植,这些API函数用宏来实现,比如上下文切换.进入和退出临界区.禁止和使能可屏蔽中断.内核控制函
-
FreeRTOS实时操作系统队列的API函数讲解
目录 FreeRTOS为操作队列提供了非常丰富的API函数,包括队列的创建.删除,灵活的入队和出队方式.带中断保护的入队和出队等等.下面就来详细讲述这些API函数. 1.获取队列入队信息数目1.1函数描述 UBaseType_t uxQueueMessagesWaiting( QueueHandle_t xQueue ); 返回队列中存储的信息数目.具有中断保护的版本为uxQueueMessagesWaitingFromISR(),原型为:UBaseType_t uxQueueMessagesW
-
freertos实时操作系统临界段保护开关中断及进入退出
目录 中断的基础知识 嵌套: 优先级: 中断的悬起与解悬: 咬尾中断Tail‐Chaining: 晚到的高优先级异常: 进入临界段和退出临界段 中断的基础知识 嵌套: 嵌套向量中断控制器 NVIC(Nested Vectored Interrupt Controller与内核是紧耦合的.提供如下的功能:可嵌套中断支持.向量中断支持.动态优先级调整支持.中断延迟大大缩短. 中断可屏蔽. 所有的外部中断和绝大多数系统异常均支持可嵌套中断.异常都可以被赋予不同的优先级,当前优先级被存储在 xPSR的专
-
FreeRTOS实时操作系统多任务管理基础知识
目录 什么是多任务系统? FreeRTOS 任务与协程 1.任务(Task) 的特性 2.协程(Co-routine)的特性 任务状态 运行态 就绪态 阻塞态 挂起态 任务优先级 任务实现 任务控制块 任务堆栈 RTOS 系统的核心就是任务管理,FreeRTOS 也不例外,而且大多数学习 RTOS 系统的工程师或者学生主要就是为了使用 RTOS 的多任务处理功能,初步上手 RTOS 系统首先必须掌握的也是任务的创建.删除.挂起和恢复等操作,由此可见任务管理的重要性. 什么是多任务系统? 回想一
-
FreeRTOS实时操作系统Cortex-M内核使用注意事项
前言 在阅读本文之前,有两个定义在FreeRTOSConfig.h中的宏,你必须先明白它们是什么意思,<FreeRTOS内核配置说明>一文中,讲解了这两个宏: configKERNEL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY FreeRTOS与Cortex-M内核可谓是绝配,以至于让移植和使用FreeRTOS都变得更简单起来.根据FreeRTOS官方反馈,在Cortex-M内核上使用FreeRTOS大多数的问题点是由不正确