python opencv进行图像拼接
本文实例为大家分享了python opencv进行图像拼接的具体代码,供大家参考,具体内容如下
思路和方法
思路
1、提取要拼接的两张图片的特征点、特征描述符;
2、将两张图片中对应的位置点找到,匹配起来;
3、如果找到了足够多的匹配点,就能将两幅图拼接起来,拼接前,可能需要将第二幅图透视旋转一下,利用找到的关键点,将第二幅图透视旋转到一个与第一幅图相同的可以拼接的角度;
4、进行拼接;
5、进行拼接后的一些处理,让效果看上去更好。
实现方法
1、提取图片的特征点、描述符,可以使用opencv创建一个SIFT对象,SIFT对象使用DoG方法检测关键点,并对每个关键点周围的区域计算特征向量。在实现时,可以使用比SIFT快的SURF方法,使用Hessian算法检测关键点。因为只是进行全景图拼接,在使用SURF时,还可以调节它的参数,减少一些关键点,只获取64维而不是128维的向量等,加快速度。
2、在分别提取好了两张图片的关键点和特征向量以后,可以利用它们进行两张图片的匹配。在拼接图片中,可以使用Knn进行匹配,但是使用FLANN快速匹配库更快,图片拼接,需要用到FLANN的单应性匹配。
3、单应性匹配完之后可以获得透视变换H矩阵,用这个的逆矩阵来对第二幅图片进行透视变换,将其转到和第一张图一样的视角,为下一步拼接做准备。
4、透视变换完的图片,其大小就是最后全景图的大小,它的右边是透视变换以后的图片,左边是黑色没有信息。拼接时可以比较简单地处理,通过numpy数组选择直接把第一张图加到它的左边,覆盖掉重叠部分,得到拼接图片,这样做非常快,但是最后效果不是很好,中间有一条分割痕迹非常明显。使用opencv指南中图像金字塔的代码对拼接好的图片进行处理,整个图片平滑了,中间的缝还是特别突兀。
5、直接拼效果不是很好,可以把第一张图叠在左边,但是对第一张图和它的重叠区做一些加权处理,重叠部分,离左边图近的,左边图的权重就高一些,离右边近的,右边旋转图的权重就高一些,然后两者相加,使得过渡是平滑地,这样看上去效果好一些,速度就比较慢。如果是用SURF来做,时间主要画在平滑处理上而不是特征点提取和匹配。
python_opencv中主要使用的函数
0、基于python 3.7和对应的python-opencv
1、cv2.xfeatures2d.SURF_create ([hessianThreshold[, nOctaves[, nOctaveLayers[, extended[, upright]]]]])
该函数用于生成一个SURF对象,在使用时,为提高速度,可以适当提高hessianThreshold,以减少检测的关键点的数量,可以extended=False,只生成64维的描述符而不是128维,令upright=True,不检测关键点的方向。
2、cv2.SURF.detectAndCompute(image, mask[, descriptors[, useProvidedKeypoints]])
该函数用于计算图片的关键点和描述符,需要对两幅图都进行计算。
3、flann=cv2.FlannBasedMatcher(indexParams,searchParams)
match=flann.knnMatch(descrip1,descrip2,k=2)
flann快速匹配器有两个参数,一个是indexParams,一个是searchParams,都用手册上建议的值就可以。在创建了匹配器得到匹配数组match以后,就可以参考Lowe给出的参数,对匹配进行过滤,过滤掉不好的匹配。其中返回值match包括了两张图的描述符距离distance 、训练图(第二张)的描述符索引trainIdx 、查询的图(第一张)的描述符索引queryIdx 这几个属性。
4、M,mask=cv2.findHomography(srcPoints, dstPoints[, method[, ransacReprojThreshold[, mask]]])
这个函数实现单应性匹配,返回的M是一个矩阵,即对关键点srcPoints做M变换能变到dstPoints的位置。
5、warpImg=cv2.warpPerspective(src,np.linalg.inv(M),dsize[,dst[,flags[,borderMode[,borderValue]]]])
用这个函数进行透视变换,变换视角。src是要变换的图片,np.linalg.inv(M)是④中M的逆矩阵,得到方向一致的图片。
6、a=b.copy() 实现深度复制,Python中默认是按引用复制,a=b是a指向b的内存。
7、draw_params = dict(matchColor = (0,255,0),singlePointColor = (255,0,0),matchesMask = matchMask,flags = 2),img3 = cv2.drawMatches(img1,kp1,img2,kp2,good,None,**draw_params)
使用drawMatches可以画出匹配的好的关键点,matchMask是比较好的匹配点,之间用绿色线连接起来。
核心代码
import cv2
import numpy as np
from matplotlib import pyplot as plt
import time
MIN = 10
starttime=time.time()
img1 = cv2.imread('1.jpg') #query
img2 = cv2.imread('2.jpg') #train
#img1gray=cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
#img2gray=cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY)
surf=cv2.xfeatures2d.SURF_create(10000,nOctaves=4,extended=False,upright=True)
#surf=cv2.xfeatures2d.SIFT_create()#可以改为SIFT
kp1,descrip1=surf.detectAndCompute(img1,None)
kp2,descrip2=surf.detectAndCompute(img2,None)
FLANN_INDEX_KDTREE = 0
indexParams = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5)
searchParams = dict(checks=50)
flann=cv2.FlannBasedMatcher(indexParams,searchParams)
match=flann.knnMatch(descrip1,descrip2,k=2)
good=[]
for i,(m,n) in enumerate(match):
if(m.distance<0.75*n.distance):
good.append(m)
if len(good)>MIN:
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1,1,2)
ano_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1,1,2)
M,mask=cv2.findHomography(src_pts,ano_pts,cv2.RANSAC,5.0)
warpImg = cv2.warpPerspective(img2, np.linalg.inv(M), (img1.shape[1]+img2.shape[1], img2.shape[0]))
direct=warpImg.copy()
direct[0:img1.shape[0], 0:img1.shape[1]] =img1
simple=time.time()
#cv2.namedWindow("Result", cv2.WINDOW_NORMAL)
#cv2.imshow("Result",warpImg)
rows,cols=img1.shape[:2]
for col in range(0,cols):
if img1[:, col].any() and warpImg[:, col].any():#开始重叠的最左端
left = col
break
for col in range(cols-1, 0, -1):
if img1[:, col].any() and warpImg[:, col].any():#重叠的最右一列
right = col
break
res = np.zeros([rows, cols, 3], np.uint8)
for row in range(0, rows):
for col in range(0, cols):
if not img1[row, col].any():#如果没有原图,用旋转的填充
res[row, col] = warpImg[row, col]
elif not warpImg[row, col].any():
res[row, col] = img1[row, col]
else:
srcImgLen = float(abs(col - left))
testImgLen = float(abs(col - right))
alpha = srcImgLen / (srcImgLen + testImgLen)
res[row, col] = np.clip(img1[row, col] * (1-alpha) + warpImg[row, col] * alpha, 0, 255)
warpImg[0:img1.shape[0], 0:img1.shape[1]]=res
final=time.time()
img3=cv2.cvtColor(direct,cv2.COLOR_BGR2RGB)
plt.imshow(img3,),plt.show()
img4=cv2.cvtColor(warpImg,cv2.COLOR_BGR2RGB)
plt.imshow(img4,),plt.show()
print("simple stich cost %f"%(simple-starttime))
print("\ntotal cost %f"%(final-starttime))
cv2.imwrite("simplepanorma.png",direct)
cv2.imwrite("bestpanorma.png",warpImg)
else:
print("not enough matches!")
运行结果
原图1.jpg

原图2.jpg

特征点匹配

直接拼接和平滑对比
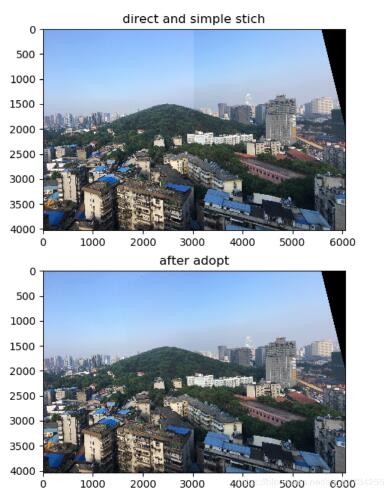
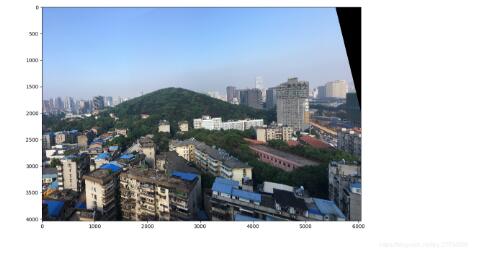
效果
本文已被收录到专题《python图片处理操作》,欢迎大家点击学习更多精彩内容。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-
python实现图像全景拼接
图像的全景拼接包括三大部分:特征点提取与匹配.图像配准.图像融合. 1.基于SIFT的特征点的提取与匹配 利用Sift提取图像的局部特征,在尺度空间寻找极值点,并提取出其位置.尺度.方向信息. 具体步骤: 1). 生成高斯差分金字塔(DOG金字塔),尺度空间构建 2). 空间极值点检测(关键点的初步查探) 3). 稳定关键点的精确定位 4). 稳定关键点方向信息分配 5). 关键点描述 6). 特征点匹配 2.图像配准 图像配准是一种确定待拼接图像间的重叠区域以及重叠位置的技术,它是整个图像拼接
-
python实现单张图像拼接与批量图片拼接
本文实例为大家分享了python实现图像拼接的具体代码,供大家参考,具体内容如下 一.效果 二.代码 1.单张图片拼接 # 图片拼接 from PIL import Image # pil paste可以进行图片拼接 import cv2 import numpy as np path="F:/out/"+str(0)+".jpg" img_out=cv2.imread(path) num=5 for i in range(1,num): path="F
-
python+OpenCV实现图像拼接
本文实例为大家分享了利用python和OpenCV实现图像拼接,供大家参考,具体内容如下 python+OpenCV实现image stitching 在最新的OpenCV官方文档中可以找到C++版本的Stitcher类的说明, 但是python版本的还没有及时更新, 本篇对python版本的实现做一个简单的介绍. 由于官方文档中还没有python版本的Stitcher类的说明, 因此只能自己去GitHub源码上找, 以下是stitching的样例: from __future__ import
-
python实现图像拼接
本文实例为大家分享了python实现图像拼接的具体代码,供大家参考,具体内容如下 1.待拼接的图像 2. 基于SIFT特征点和RANSAC方法得到的图像特征点匹配结果 3.图像变换结果 4.代码及注意事项 import cv2 import numpy as np def cv_show(name, image): cv2.imshow(name, image) cv2.waitKey(0) cv2.destroyAllWindows() def detectAndCompute(image):
-
python+gdal+遥感图像拼接(mosaic)的实例
作为摄影测量与遥感的从业者,笔者最近开始深入研究gdal,为工作打基础!个人觉得gdal也是没有什么技术含量,调用别人的api.但是想想这也是算法应用的一个技能,多学无害! 关于遥感图像的镶嵌,主要分为6大步骤: step1: 1)对于每一幅图像,计算其行与列: 2)获取左上角X,Y 3)获取像素宽和像素高 4)计算max X 和 min Y,切记像素高是负值 maxX1 = minX1 + (cols1 * pixelWidth) minY1 = maxY1 + (rows1 * pixelH
-
python opencv 图像拼接的实现方法
初级的图像拼接为将两幅图像简单的粘贴在一起,仅仅是图像几何空间的转移与合成,与图像内容无关.高级图像拼接也叫作基于特征匹配的图像拼接,拼接时消去两幅图像相同的部分,实现拼接合成全景图. 具有相同尺寸的图A和图B含有相同的部分与不同的部分,如图所示: 用基于特征的图像拼接实现后: 设图像高为h,相同部分的宽度为wx 拼接后图像的宽w=wA+wB-wx 因此,可以先构建一个高为h,宽为W*2的空白图像,将左图像向右平移wx,右图像粘贴在右侧.则右图像刚好覆盖左图像中的相同部分
-
python实现图像拼接功能
利用Python将Market1501的分割图片和原图两张图片进行拼接成一左一右一张图片,并将图片的像素值调整成256*128. 所有文件夹: 文件夹下的所有原图: 文件夹下的所有的分割图片: 代码如下: import PIL.Image as Image import os IMAGES_PATH = 'E:/gyx/Learning/Practice/4/data/market1501_seg_1/test/ori_img/' # 原图片集地址 IMAGES_PATH_1 = 'E:/gyx
-
Python+OpenCV实现图像的全景拼接
本文实例为大家分享了Python+OpenCV实现图像的全景拼接的具体代码,供大家参考,具体内容如下 环境:python3.5.2 + openCV3.4 1.算法目的 将两张相同场景的场景图片进行全景拼接. 2.算法步骤 本算法基本步骤有以下几步: 步骤1:将图形先进行桶形矫正 没有进行桶形变换的图片效果可能会像以下这样: 图片越多拼接可能就会越夸张. 本算法是将图片进行桶形矫正.目的就是来缩减透视变换(Homography)之后图片产生的变形,从而使拼接图片变得畸形. 步骤2:特征点匹配 本
-
python opencv进行图像拼接
本文实例为大家分享了python opencv进行图像拼接的具体代码,供大家参考,具体内容如下 思路和方法 思路 1.提取要拼接的两张图片的特征点.特征描述符: 2.将两张图片中对应的位置点找到,匹配起来: 3.如果找到了足够多的匹配点,就能将两幅图拼接起来,拼接前,可能需要将第二幅图透视旋转一下,利用找到的关键点,将第二幅图透视旋转到一个与第一幅图相同的可以拼接的角度: 4.进行拼接: 5.进行拼接后的一些处理,让效果看上去更好. 实现方法 1.提取图片的特征点.描述符,可以使用opencv创
-

Python图像处理之图像拼接
一.前言 图像拼接技术就是将数张有重叠部分的图像(可能是不同时间.不同视角或者不同传感器获得的)拼成一幅无缝的全景图或高分辨率图像的技术. 二.特征点匹配 特征点具有局部差异性 动机:特征点具有局部差异性 图像梯度 Harris矩阵 以每个点为中心取一个窗口,窗口大小为55或者77,如果这个点具有差异性,往周围任意方向移动,周围的环境变化都是会比较大的,如果满足这个特性,我们就认为这个特征点具有明显的局部差异性.在工事中,I表示像素,如果是 彩色图像就是RGB,灰色图像就是灰度.(u,v)表示方
-
Python OpenCV学习之特征点检测与匹配详解
目录 背景 一.Harris角点 二.Shi-Tomasi角点检测 三.SIFT关键点 四.SIFT描述子 五.SURF 六.ORB 七.暴力特征匹配(BF) 八.FLANN特征匹配 九.图像查找 总结 背景 提取图像的特征点是图像领域中的关键任务,不管在传统还是在深度学习的领域中,特征代表着图像的信息,对于分类.检测任务都是至关重要的: 特征点应用的一些场景: 图像搜索:以图搜图(电商.教育领域) 图像拼接:全景拍摄(关联图像拼接) 拼图游戏:游戏领域 一.Harris角点 哈里斯角点检测主要
-
python+opencv实现的简单人脸识别代码示例
# 源码如下: #!/usr/bin/env python #coding=utf-8 import os from PIL import Image, ImageDraw import cv def detect_object(image): '''检测图片,获取人脸在图片中的坐标''' grayscale = cv.CreateImage((image.width, image.height), 8, 1) cv.CvtColor(image, grayscale, cv.CV_BGR2GR
-
python+opencv实现动态物体识别
注意:这种方法十分受光线变化影响 自己在家拿着手机瞎晃的成果图: 源代码: # -*- coding: utf-8 -*- """ Created on Wed Sep 27 15:47:54 2017 @author: tina """ import cv2 import numpy as np camera = cv2.VideoCapture(0) # 参数0表示第一个摄像头 # 判断视频是否打开 if (camera.isOpened()
-
python opencv之SURF算法示例
本文介绍了python opencv之SURF算法示例,分享给大家,具体如下: 目标: SURF算法基础 opencv总SURF算法的使用 原理: 上节课使用了SIFT算法,当时这种算法效率不高,需要更快速的算法.在06年有人提出了SURF算法"加速稳定特征",从名字上来看,他是SIFT算法的加速版本. (原文) 在SIFT算法当中使用高斯差分方程(Difference of Gaussian)对高斯拉普拉斯方程( Laplacian of Gaussian)进行近似.然而,SURF使
-
Python OpenCV 直方图的计算与显示的方法示例
本篇文章介绍如何用OpenCV Python来计算直方图,并简略介绍用NumPy和Matplotlib计算和绘制直方图 直方图的背景知识.用途什么的就直接略过去了.这里直接介绍方法. 计算并显示直方图 与C++中一样,在Python中调用的OpenCV直方图计算函数为cv2.calcHist. cv2.calcHist的原型为: cv2.calcHist(images, channels, mask, histSize, ranges[, hist[, accumulate ]]) #返回his
-
python OpenCV学习笔记之绘制直方图的方法
本篇文章主要介绍了python OpenCV学习笔记之绘制直方图的方法,小编觉得挺不错的,现在分享给大家,也给大家做个参考.一起跟随小编过来看看吧 官方文档 – https://docs.opencv.org/3.4.0/d1/db7/tutorial_py_histogram_begins.html 直方图会让你对图像的强度分布有一个全面的认识.它是一个在x轴上带有像素值(从0到255,但不总是),在y轴上的图像中对应的像素数量的图. 这只是理解图像的另一种方式.通过观察图像的直方图,你可以直