opencv3/C++图像像素操作详解
RGB图像转灰度图
RGB图像转换为灰度图时通常使用:

进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像。
#include<opencv2/opencv.hpp>
#include<math.h>
using namespace cv;
int main()
{
//像素操作
Mat src,dst;
src = imread("E:/image/image/daibola.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input");
imshow("input",src);
dst.create(src.size(), src.type());
for(int row = 0; row < src.rows; row++)
{
for(int col = 0; col < src.cols; col++)
{
int b = src.at<Vec3b>(row, col)[0];
int g = src.at<Vec3b>(row, col)[1];
int r = src.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = max(r,max(g,b));
dst.at<Vec3b>(row, col)[1] = max(r,max(g,b));
dst.at<Vec3b>(row, col)[2] = max(r,max(g,b));
}
}
namedWindow("output");
imshow("output",dst);
waitKey();
}

同理使用min(r,min(g,b))可以看到由于选择了较小的灰度值图像会明显变暗:

图像线性增强
通过对图像像素操作(线性变换),实现图像的线性增强。
#include<opencv2/opencv.hpp>
#include<math.h>
using namespace cv;
int main()
{
Mat src1, dst;
src1 = imread("E:/image/image/im1.jpg");
if(src1.empty())
{
printf("can not load im1 \n");
return -1;
}
double alpha = 1.2, beta = 50;
dst = Mat::zeros(src1.size(), src1.type());
for(int row = 0; row < src1.rows; row++)
{
for(int col = 0; col < src1.cols; col++)
{
if(src1.channels() == 3)
{
int b = src1.at<Vec3b>(row, col)[0];
int g = src1.at<Vec3b>(row, col)[1];
int r = src1.at<Vec3b>(row, col)[2];
dst.at<Vec3b>(row, col)[0] = saturate_cast<uchar>(b*alpha + beta);
dst.at<Vec3b>(row, col)[1] = saturate_cast<uchar>(g*alpha + beta);
dst.at<Vec3b>(row, col)[2] = saturate_cast<uchar>(r*alpha + beta);
}
else if (src1.channels() == 1)
{
float v = src1.at<uchar>(row, col);
dst.at<uchar>(row, col) = saturate_cast<uchar>(v*alpha + beta);
}
}
}
namedWindow("output",CV_WINDOW_AUTOSIZE);
imshow("output", dst);
waitKey();
return 0;
}
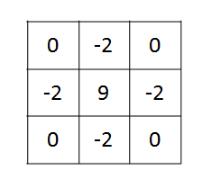
掩膜操作调整图像对比度
使用一个3×3掩模增强图像对比度:
#include<opencv2/opencv.hpp>
#include<math.h>
using namespace cv;
int main()
{
Mat src, dst;
src = imread("E:/image/image/daibola.jpg");
CV_Assert(src.depth() == CV_8U);
if(!src.data)
{
printf("can not load image \n");
return -1;
}
src.copyTo(dst);
for(int row = 1; row<(src.rows - 1); row++)
{
const uchar* previous = src.ptr<uchar>(row - 1);
const uchar* current = src.ptr<uchar>(row);
const uchar* next = src.ptr<uchar>(row + 1);
uchar* output = dst.ptr<uchar>(row);
for(int col = src.channels(); col < (src.cols - 1)*src.channels(); col++)
{
*output = saturate_cast<uchar>(9 * current[col] - 2*previous[col] - 2*next[col] - 2*current[col - src.channels()] - 2*current[col + src.channels()]);
output++;
}
}
namedWindow("image", CV_WINDOW_AUTOSIZE);
imshow("image",dst);
waitKey();
return 0;
}

像素重映射
利用cv::remap实现像素重映射;
cv::remap参数说明:
Remap( InputArray src,// 输入图像 OutputArray dst,// 输出图像 InputArray map1,// 映射表1(CV_32FC1/CV_32FC2) InputArray map2,// 映射表2(CV_32FC1/CV_32FC2) int interpolation,// 选择的插值 int borderMode,// 边界类型(BORDER_CONSTANT) const Scalar borderValue// 颜色 )
插值方法:
CV_INTER_NN =0, CV_INTER_LINEAR =1, CV_INTER_CUBIC =2, CV_INTER_AREA =3, CV_INTER_LANCZOS4 =4
通过像素重映射实现图像垂直翻转:
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src,dst;
src = imread("E:/image/image/daibola.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
Mat mapx,mapy;
mapx.create(src.size(), CV_32FC1);
mapy.create(src.size(), CV_32FC1);
for(int row = 0; row < src.rows; row++)
{
for(int col = 0; col < src.cols; col++)
{
mapx.at<float>(row, col) = col;
mapy.at<float>(row, col) = src.rows - row - 1;
}
}
remap(src, dst, mapx, mapy, CV_INTER_NN, BORDER_CONSTANT, Scalar(0,255,255));
namedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output",dst);
waitKey();
return 0;
}

以上这篇opencv3/C++图像像素操作详解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
opencv3/C++图像像素操作详解
RGB图像转灰度图 RGB图像转换为灰度图时通常使用: 进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像. #include<opencv2/opencv.hpp> #include<math.h> using namespace cv; int main() { //像素操作 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(src.empty()) { printf
-
opencv3/C++视频中叠加透明图片的实现
如下所示: 大致思路:获取摄像头画面后,通过在图像上循环叠加一组背景透明的PNG图片,在图像上产生类似GIF的动图效果. #include<opencv2/opencv.hpp> using namespace cv; //PNG透明图片叠加到视频 int main() { Mat frame; VideoCapture capture; capture.open(0); if(!capture.isOpened()) { printf("can not open the camea
-
opencv3/C++图像边缘提取方式
canny算子实现 使用track bar 调整canny算子参数,提取到合适的图像边缘. #include<iostream> #include<opencv2/opencv.hpp> using namespace cv; void trackBar(int, void*); int s1=0,s2=0; Mat src, dst; int main() { src = imread("E:/image/image/daibola.jpg"); if(src
-
opencv3/C++ 将图片转换为视频的实例
现有一些图片按顺序放置在一文件夹jogging1\下,如图: 需要将其合并转换为一个视频. 示例: 环境:Win7+OpenCV3+VS2012 #include<opencv2/opencv.hpp> #include <stdio.h> #include <io.h> #include <string> #include <iostream> #include <fstream> using namespace std; usin
-

基于Qt OpenCV的图像灰度化像素操作详解
效果图 实现代码 #ifndef WIDGET_H #define WIDGET_H #include <QWidget> #include<opencv2/opencv.hpp> using namespace cv; QT_BEGIN_NAMESPACE namespace Ui { class Widget; } QT_END_NAMESPACE class Widget : public QWidget { Q_OBJECT public: Widget(QWidget *
-
opencv3/python 鼠标响应操作详解
鼠标回调函数: def setMouseCallback( windowName, #窗口名称 onMouse, #鼠标响应处理函数 param=None) #处理函数的ID event鼠标事件: event: EVENT_LBUTTONDBLCLK = 7 左键双击 EVENT_LBUTTONDOWN = 1 左键点击 EVENT_LBUTTONUP = 4 左键释放 EVENT_MBUTTONDBLCLK = 9 中间释放 EVENT_MBUTTONDOWN = 3 中间点击 EVENT_M
-
Python常用图像形态学操作详解
目录 腐蚀 膨胀 开运算与闭运算 开运算 闭运算 梯度运算 礼帽与黑帽 礼帽 黑帽 腐蚀 在一些图像中,会有一些异常的部分,比如这样的毛刺: 对于这样的情况,我们就可以应用复式操作了.需要注意的是,腐蚀操作只能处理二值图像,即像素矩阵的值只有0(黑色)和255(白色).我们先看看代码和效果: import cv2 import numpy as np img = cv2.imread('dagongren.png') # 腐蚀的代码 kernel = np.ones((3,3),np.uint8
-
Android Bitmap像素级操作详解
一:什么是Bitmap像素级的操作 相信大家都知道一张jpg或png放大后会是一个个小格子,称为一个像素(px),而且一个小格子是一种颜色,也就是一张jpg或png图片就是很多颜色的合集,而这些合集信息都被封装到了Bitmap类中.你可以使用Bitmap获取任意像素点,并修改它,对与某像素点而言,颜色信息是其主要的部分.所以像素级操作就是对一个个点的颜色超过. 二:载入与像素读写 在Android SDK中,图像的像素读写能够通过getPixel与setPixel两个Bitmap的API实现.
-
opencv3/Python 稠密光流calcOpticalFlowFarneback详解
光流是由物体或相机的运动引起的图像对象在两个连续帧之间的视在运动模式.光流方法计算在t和 t+Δtt+Δt时刻拍摄的两个图像帧之间的每个像素的运动位置.这些方法被称为差分,因为它们基于图像信号的局部泰勒级数近似; 也就是说,它们使用关于空间和时间坐标的偏导数. 和稀疏光流相比,稠密光流不仅仅是选取图像中的某些特征点(一般用角点)进行计算;而是对图像进行逐点匹配,计算所有点的偏移量,得到光流场,从而进行配准.因此其计算量会显著大于稀疏光流,但效果一般优于稀疏光流. 函数: def calcOpti
-
opencv3/C++ PHash算法图像检索详解
PHash算法即感知哈希算法/Perceptual Hash algorithm,计算基于低频的均值哈希.对每张图像生成一个指纹字符串,通过对该字符串比较可以判断图像间的相似度. PHash算法原理 将图像转为灰度图,然后将图片大小调整为32*32像素并通过DCT变换,取左上角的8*8像素区域.然后计算这64个像素的灰度值的均值.将每个像素的灰度值与均值对比,大于均值记为1,小于均值记为0,得到64位哈希值. PHash算法实现 将图片转为灰度值 将图片尺寸缩小为32*32 resize(src
-
OpenCV图像分割之分水岭算法与图像金字塔算法详解
目录 前言 一.使用分水岭算法分割图像 1.cv2.distanceTransform()函数 2.cv2.connectedComponents()函数 3.cv2.watershed()函数 二.图像金字塔 1.高斯金字塔向下采样 2.高斯金字塔向上采样 3.拉普拉斯金字塔 4.应用图像金字塔实现图像的分割和融合 前言 主要介绍OpenCV中的分水岭算法.图像金字塔对图像进行分割的方法. 一.使用分水岭算法分割图像 分水岭算法的基本原理为:将任意的灰度图像视为地形图表面,其中灰度值高的部分表
-
Python图像处理之图像量化处理详解
目录 一.图像量化处理原理 二.图像量化实现 三.图像量化等级对比 四.K-Means聚类实现量化处理 五.总结 一.图像量化处理原理 量化(Quantization)旨在将图像像素点对应亮度的连续变化区间转换为单个特定值的过程,即将原始灰度图像的空间坐标幅度值离散化.量化等级越多,图像层次越丰富,灰度分辨率越高,图像的质量也越好:量化等级越少,图像层次欠丰富,灰度分辨率越低,会出现图像轮廓分层的现象,降低了图像的质量.图8-1是将图像的连续灰度值转换为0至255的灰度级的过程[1-3]. 如果
-
OpenCV学习之图像形态学处理详解
目录 1.腐蚀操作 2.膨胀操作 3.开闭运算 4.梯度运算 5.Top Hat Black Hat运算 本文是OpenCV图像视觉入门之路的第11篇文章,本文详细的在图像形态学进行了图像处理,例如:腐蚀操作.膨胀操作.开闭运算.梯度运算.Top Hat Black Hat运算等操作. 1.腐蚀操作 从下面代码中可以看到有三幅腐蚀程度不同的图,腐蚀越严重像素就越模糊 import cv2 import numpy as np from numpy import unicode if __name