Python动态演示旋转矩阵的作用详解
目录
- 先新建一组散点充当坐标轴
- 旋转矩阵与初步演示
- 转动次序对旋转的影响
- 动态演示旋转过程
- 总结
先新建一组散点充当坐标轴
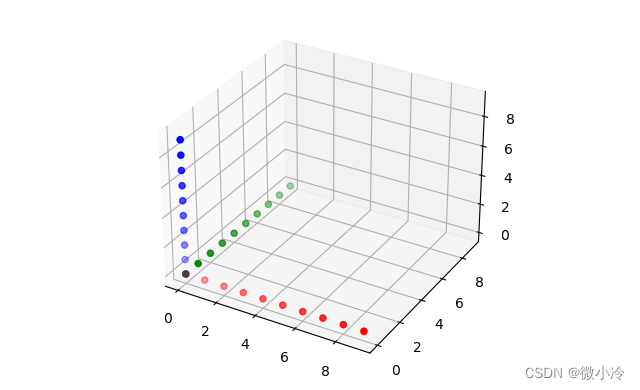
为了比较直观地展示旋转过程,这里通过散点来新建三个坐标轴,通过对这三个坐标轴的转动,来直观地展现转动矩阵对坐标变换的影响。
import numpy as np
import matplotlib.pyplot as plt
def setAxis(N, axis=0):
xs = np.arange(N)
ys = np.zeros_like(xs)
zs = np.zeros_like(xs)
if axis==0 : return [xs, ys, zs]
elif axis==1 : return [ys, xs, zs]
else: return [ys, zs, xs]
def drawAxis(X,Y,Z):
ax = plt.subplot(projection='3d')
ax.scatter(*X, c='r')
ax.scatter(*Y, c='g')
ax.scatter(*Z, c='b')
plt.show()
X = setAxis(10, 0)
Y = setAxis(10, 1)
Z = setAxis(10, 2)
drawAxis(X, Y, Z)
效果为
旋转矩阵与初步演示
欧拉角是用来唯一地确定定点转动刚体位置的三个一组独立角参量,由章动角θ、进动角ψ和自转角φ组成,为L.欧拉首先提出,故得名。
为了尽快进入演示部分,故对原理的介绍从略,仅从二维平面上的旋转矩阵出发,做一个简单的推导,而三维旋转矩阵,至少在形式上与二维是雷同的。
假设坐标系中有一个向量 ( x , y ),其模长为 ,角度为
,角度为 。若将其围绕坐标原点逆时针旋转 θ \theta θ,则其坐标变为
。若将其围绕坐标原点逆时针旋转 θ \theta θ,则其坐标变为

由于  ,则上式可以写为
,则上式可以写为

写成矩阵形式即为

也就是说,在平面直角坐标系上,向量绕原点顺时针旋转 θ \theta θ,相当于左乘一个旋转矩阵。
推广到三维,为了限制 x y xy xy坐标平面上的旋转,要将其旋转中心从原点扩展为绕着 z z z轴旋转,从而三维旋转矩阵可推广为

同理可得到绕三个轴转动的旋转矩阵,为了书写方便,记 ,可列出下表。
,可列出下表。

下面用lambda表达式来实现,用以描述单个轴的旋转过程。
import numpy as np
# 将角度转弧度后再求余弦
cos = lambda th : np.cos(np.deg2rad(th))
sin = lambda th : np.sin(np.deg2rad(th))
# 即 Rx(th) => Matrix
Rx = lambda th : np.array([
[1, 0, 0],
[0, cos(th), -sin(th)],
[0, sin(th), cos(th)]])
Ry = lambda th : np.array([
[cos(th), 0, sin(th)],
[0 , 1, 0],
[-sin(th), 0, cos(th)]
])
Rz = lambda th : np.array([
[cos(th) , sin(th), 0],
[-sin(th), cos(th), 0],
[0 , 0, 1]])
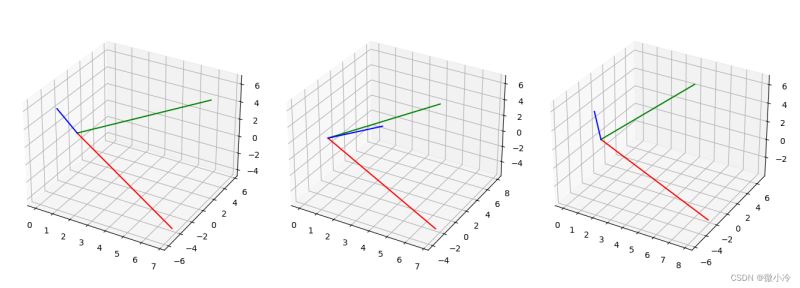
有了旋转矩阵,就可以旋转,接下来让坐标轴沿着三个轴分别旋转30°,其效果如下

代码如下
def drawAxis(X, Y, Z, fig, i):
ax = fig.add_subplot(1,3,i,projection='3d')
ax.plot(*X, c='r')
ax.plot(*Y, c='g')
ax.plot(*Z, c='b')
Xx, Yx, Zx = Rx(30) @ X, Rx(30) @ Y, Rx(30) @ Z
Xy, Yy, Zy = Ry(30) @ X, Ry(30) @ Y, Ry(30) @ Z
Xz, Yz, Zz = Rz(30) @ X, Rz(30) @ Y, Rz(30) @ Z
fig = plt.figure("rotate")
drawAxis(Xx, Yx, Zx, fig, 1)
drawAxis(Xy, Yy, Zy, fig, 2)
drawAxis(Xz, Yz, Zz, fig, 3)
plt.show()
转动次序对旋转的影响
由于旋转被建模成了矩阵,而众所周知矩阵乘法是不可交换的,也就是说,就算绕着三个坐标轴旋转相同的角度,也会因为转动次序不同而引发不同的结果。
XYZ = [X, Y, Z]
R_xyz = [Rz(30) @ Ry(30) @ Rx(30) @ R for R in XYZ]
R_zyx = [Rx(30) @ Ry(30) @ Rz(30) @ R for R in XYZ]
R_yxz = [Rz(30) @ Rx(30) @ Ry(30) @ R for R in XYZ]
fig = plt.figure("rotate")
drawAxis(*R_xyz, fig, 1)
drawAxis(*R_zyx, fig, 2)
drawAxis(*R_yxz, fig, 3)
plt.show()
得到下图
动态演示旋转过程
30°的转动之后,坐标轴变得面目全非,接下来要做的就是动态绘制这三个坐标轴的旋转过程
from numpy.random import rand
from matplotlib import animation
Rot = [Rx, Ry, Rz]
# 根据指定坐标轴顺序来以指定角度旋转向量
def rotVec(vec, axis, degs):
for i in range(len(axis)):
vec = Rot[axis[i]](degs[i]) @ vec
return vec
# 若x在[a,b]区间,则对a取模,若小于a置0,大于b为b-a
def truncMod(x, a, b):
if x < a : return 0
elif x >= b : return b-a
else : return x%(b-a)
# 三个坐标轴
XYZ = [setAxis(10,i) for i in range(3)]
fig = plt.figure(figsize=(5,5))
ax = fig.add_subplot(projection='3d')
ax.grid()
lines = [ax.plot([],[],[], '-', lw=0.5, c=c)[0]
for c in 'rgb']
def animate(n):
# 按照xyz顺序旋转
axis = [2,1,0]
degs = [truncMod(n, st, st + 30) for st in [0,30,60]]
newXYZ = [rotVec(x, axis, degs) for x in XYZ]
for i in range(3):
lines[i].set_data(newXYZ[i][0],newXYZ[i][1])
lines[i].set_3d_properties(newXYZ[i][2])
return lines
ani = animation.FuncAnimation(fig, animate,
range(90), interval=50, blit=True)
#plt.show()
ani.save("zyx.gif")
效果如下
x-y-z

z-y-x

总结
到此这篇关于Python动态演示旋转矩阵作用的文章就介绍到这了,更多相关Python动态演示旋转矩阵内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python实现回旋矩阵方式(旋转矩阵)
我们知道Python中是没有数组 这种数据结构的,所以要想实现回旋矩阵,需要先导入一个numpy包, 它是一个由多维数组对象和用于处理数组的例程集合组成的python扩充程序库,可以用来做数组算数和逻辑运算 思路: 首先创建一个n*m全为零的矩阵,然后按照旋转规律依次替换里面的值 最外层的循环代表替换一圈数据,这一圈数据在数组中的形状是一个矩形,我们分析可以知道,最后一轮循环有两种情况: 1.替换一圈(矩形)数据 2.替换一个数据 如果是第一种情况,我们让循环正常运行就可以了,但是如果是第二种,
-
对Python的zip函数妙用,旋转矩阵详解
Python的zip函数 示例1: x = [1, 2, 3] y = [4, 5, 6] z = [7, 8, 9] xyz = zip(x, y, z) print xyz 运行的结果是: [(1, 4, 7), (2, 5, 8), (3, 6, 9)] 从这个结果可以看出zip函数的基本运作方式. 示例2: x = [1, 2, 3] y = [4, 5, 6] z = [7, 8, 9] xyz = zip(x, y, z) u = zip(*xyz) print u 运行的结果是:
-
Python3实现的旋转矩阵图像算法示例
本文实例讲述了Python3实现的旋转矩阵图像算法.分享给大家供大家参考,具体如下: 问题: 给定一个 n × n 的二维矩阵表示一个图像. 将图像顺时针旋转 90 度. 方案一:先按X轴对称旋转, 再用zip()解压,最后用list重组. # -*- coding:utf-8 -*- #! python3 class Solution: def rotate(self, matrix): """ :type matrix: List[List[int]] :rtype: v
-
python将四元数变换为旋转矩阵的实例
如下所示: import numpy as np from autolab_core import RigidTransform # 写上用四元数表示的orientation和xyz表示的position orientation = {'y': -0.6971278819736084, 'x': -0.716556549511624, 'z': -0.010016582945017661, 'w': 0.02142651612120239} position = {'y': -0.2602268
-
python 和c++实现旋转矩阵到欧拉角的变换方式
在摄影测量学科中,国际摄影测量遵循OPK系统,即是xyz转角系统,而工业中往往使用zyx转角系统. 旋转矩阵的意义:描述相对地面的旋转情况,yaw-pitch-roll对应zyx对应k,p,w #include <iostream> #include<stdlib.h> #include<eigen3/Eigen/Core> #include<eigen3/Eigen/Dense> #include<stdlib.h> using namespa
-
Python根据欧拉角求旋转矩阵的实例
利用numpy和scipy,我们可以很容易根据欧拉角求出旋转矩阵,这里的旋转轴我们你理解成四元数里面的旋转轴 import numpy as np import scipy.linalg as linalg import math #参数分别是旋转轴和旋转弧度值 def rotate_mat(self, axis, radian): rot_matrix = linalg.expm(np.cross(np.eye(3), axis / linalg.norm(axis) * radian)) a
-
python命名关键字参数的作用详解
1.说明 *,nkw表示命名关键字参数,是用户想输入的关键字参数名称,定义方式是在nkw前追加*, 2.作用 限制调用者传达的参数名称. 3.实例 # 命名关键字参数 def print_info4(name, age=18, height=178, *, weight, **kwargs): ''' 打印信息函数4,加入命名关键字参数 :param name: :param age: :param height: :param weight: :param kwargs: :return: '
-
Python动态语言与鸭子类型详解
今天来说说编程语言中的动态类型语言与鸭子类型. 动态语言 维基百科对动态语言的定义: 动态编程语言是一类在运行时可以改变其结构的语言:例如新的函数.对象.甚至代码可以被引进,已有的函数可以被删除或是其他结构上的变化.动态语言目前非常具有活力如PHP.Ruby.Python 都属于动态语言,而C.C++.Java等语言则不属于动态语言. 这个解释很抽象,其实动态语言是相对静态语言而言的,静态语言的特点是在程序执行前,代码编译时从代码中就可以知道一切,比如变量的类型,方法的返回值类型: String
-
python中的decorator的作用详解
1.概念 装饰器(decorator)就是:定义了一个函数,想在运行时动态增加功能,又不想改动函数本身的代码.可以起到复用代码的功能,避免每个函数重复性编写代码,简言之就是拓展原来函数功能的一种函数.在python中,装饰器(decorator)分为 函数装饰器 和 类装饰器 两种.python中内置的@语言就是为了简化装饰器调用. 列出几个装饰器函数: 打印日志:@log 检测性能:@performance 数据库事务:@transaction URL路由:@post('/register')
-
Python中__init__.py文件的作用详解
__init__.py 文件的作用是将文件夹变为一个Python模块,Python 中的每个模块的包中,都有__init__.py 文件. 通常__init__.py 文件为空,但是我们还可以为它增加其他的功能.我们在导入一个包时,实际上是导入了它的__init__.py文件.这样我们可以在__init__.py文件中批量导入我们所需要的模块,而不再需要一个一个的导入. # package # __init__.py import re import urllib import sys impo
-
对Python模块导入时全局变量__all__的作用详解
Python中一个py文件就是一个模块,"__all__"变量是一个特殊的变量,可以在py文件中,也可以在包的__init__.py中出现. 1.在普通模块中使用时,表示一个模块中允许哪些属性可以被导入到别的模块中, 如:全局变量,函数,类.如下,test1.py和main.py test1.py __all__=["test"] def test(): print('----test-----') def test1(): print('----test1----
-
对python中的*args与**kwgs的含义与作用详解
在定义函数的时候参数通常会使用 *args与**kwgs,形参与实参的区别不再赘述,我们来解释一下这两个的作用. *args是非关键字参数,用于元组,**kw是关键字参数 例如下面的代码 def foo(*args,**kwargs): print 'args is',args print 'kwargs is',kwargs foo(1,2) foo(k=1,w=2,a=3,r=4,g=5,s=6) foo(1,2,a=1,b=2,c=2) foo('a',1,None,a=1,b='2',c
-
Python编程中*args与**kwargs区别作用详解
相信学Python的小伙伴肯定有这样的尴尬局面,给一个函数不会用, 原因是:不知道参数列表中的类型是什么意思,比如初学者都会疑问的:*args和**kwargs到底是怎么用. 当你知道这个时,我猜你肯定能会用好多函数了! #*args的用法:当传入的参数个数未知,且不需要知道参数名称时. def func_arg(farg, *args): print("formal arg:", farg) for arg in args: print("another arg:"
-
Python音频操作工具PyAudio上手教程详解
0.引子 当需要使用Python处理音频数据时,使用python读取与播放声音必不可少,下面介绍一个好用的处理音频PyAudio工具包. PyAudio是Python开源工具包,由名思义,是提供对语音操作的工具包.提供录音播放处理等功能,可以视作语音领域的OpenCv. 1.简介 PyAudio为跨平台音频I / O库 PortAudio 提供 Python 绑定.使用PyAudio,您可以轻松地使用Python在各种平台上播放和录制音频,例如GNU / Linux,Microsoft Wi
-
对python中的高效迭代器函数详解
python中内置的库中有个itertools,可以满足我们在编程中绝大多数需要迭代的场合,当然也可以自己造轮子,但是有现成的好用的轮子不妨也学习一下,看哪个用的顺手~ 首先还是要先import一下: #import itertools from itertools import * #最好使用时用上面那个,不过下面的是为了演示比较 常用的,所以就直接全部导入了 一.无限迭代器: 由于这些都是无限迭代器,因此使用的时候都要设置终止条件,不然会一直运行下去,也就不是我们想要的结果了. 1.coun
-

Python OpenCV学习之图像滤波详解
目录 背景 一.卷积相关概念 二.卷积实战 三.均值滤波 四.高斯滤波 五.中值滤波 六.双边滤波 七.Sobel算子 八.Scharr算子 九.拉普拉斯算子 十.Canny算法 背景 图像滤波的作用简单来说就是将一副图像通过滤波器得到另一幅图像:明确一个概念,滤波器又被称为卷积核,滤波的过程又被称为卷积:实际上深度学习就是训练许多适应任务的滤波器,本质上就是得到最佳的参数:当然在深度学习之前,也有一些常见的滤波器,本篇主要介绍这些常见的滤波器: 一.卷积相关概念 卷积核大小一般为奇数的原因: