opencv实现图形轮廓检测
要想实现轮廓检测,首先我们需要对待检测的图像进行图像处理:
图像灰度化、高斯滤波、Canny 边缘检测、边缘检测放大处理、提取轮廓。
一、实现简单的全图型检测
即只要将drawContours第三个参数设置为-1 既能实现图像的全图型检测。
程序:
#include <iostream>
#include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚
#include <opencv2/imgcodecs.hpp> // 图像头文件
#include <opencv2/imgproc.hpp> // 图像处理头文件
using namespace std;
using namespace cv;
/*要进行图像形貌检测之前
*首先要二值化,再进行滤波处理,再进行Canny边缘检测
*最后才能检测出图形轮廓
*/
Mat imgGray, imgBlur, imgCanny,imgDil;
void getContours(Mat imgDil,Mat& img);
int main()
{
string path = "resources/shapes.png"; // 导入图形的时候,先要在右边点击显示所有文件!!!
Mat img = imread(path); // 在opencv 中所有的图像信息都使用Mat
// pre-processing image 图像预处理
cvtColor(img, imgGray, COLOR_BGR2GRAY);
GaussianBlur(imgGray, imgBlur,Size(3,3),3,0); // 高斯滤波
Canny(imgBlur, imgCanny, 25, 75);// Canny 边缘检测
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); // 其中 Size 和 边缘检测的放大倍数有关系
dilate(imgCanny, imgDil, kernel);
getContours(imgDil,img); // 第一个参数 是寻找轮廓的参数, 第二个参数是显示图案的参数
imshow("Image", img);
waitKey(0); // 延时,0即相当于无穷大
}
void getContours(Mat imgDil, Mat& img)
{
/* contour is a vector inside that vector there is more vector
* {{Point(20,30),Point(50,60)},{},{}} each vector like a contour and each contour have some points
*
**/
vector<vector<Point>> contours;
vector<Vec4i> hierarchy; // Vec4i 即代表该向量内有4个 int 变量typedef Vec<int, 4> Vec4i; 这四个向量每一层级代表一个轮廓
findContours(imgDil, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); // CV_CHAIN_APPROX_SIMPLE - 简单的链式接近法
drawContours(img, contours, -1, Scalar(255,0,255),2); // contouridx = -1 代表需要绘制所检测的所有轮廓
}
运行结果:
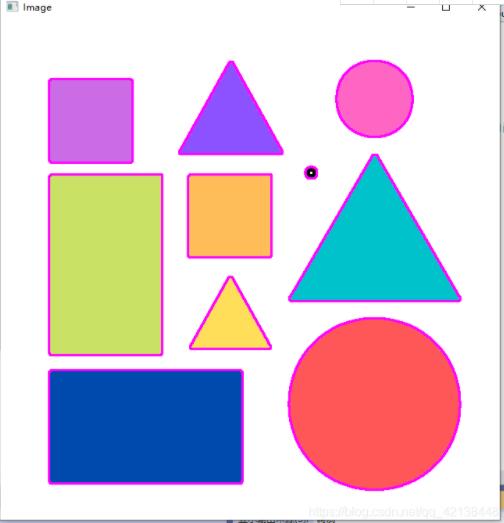
细心的读者会发现,该程序还将微小的瑕疵检测到了。
二、去除轮廓瑕疵
去除瑕疵的方法很简单,即先检测所有图形的面积,发现图形中的最小面积,即为瑕疵面积(假设我们已知该瑕疵面积<1000),之后使用if进行面积过滤。
程序:
#include <iostream>
#include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚
#include <opencv2/imgcodecs.hpp> // 图像头文件
#include <opencv2/imgproc.hpp> // 图像处理头文件
using namespace std;
using namespace cv;
/*要进行图像形貌检测之前
*首先要二值化,再进行滤波处理,再进行Canny边缘检测
*最后才能检测出图形轮廓
*/
Mat imgGray, imgBlur, imgCanny,imgDil;
void getContours(Mat imgDil,Mat& img);
int main()
{
string path = "resources/shapes.png"; // 导入图形的时候,先要在右边点击显示所有文件!!!
Mat img = imread(path); // 在opencv 中所有的图像信息都使用Mat
// pre-processing image 图像预处理
cvtColor(img, imgGray, COLOR_BGR2GRAY);
GaussianBlur(imgGray, imgBlur,Size(3,3),3,0); // 高斯滤波
Canny(imgBlur, imgCanny, 25, 75);// Canny 边缘检测
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); // 其中 Size 和 边缘检测的放大倍数有关系
dilate(imgCanny, imgDil, kernel);
getContours(imgDil,img); // 第一个参数 是寻找轮廓的参数, 第二个参数是显示图案的参数
imshow("Image", img);
waitKey(0); // 延时,0即相当于无穷大
}
void getContours(Mat imgDil, Mat& img)
{
/* contour is a vector inside that vector there is more vector
* {{Point(20,30),Point(50,60)},{},{}} each vector like a contour and each contour have some points
*
**/
vector<vector<Point>> contours;
vector<Vec4i> hierarchy; // Vec4i 即代表该向量内有4个 int 变量typedef Vec<int, 4> Vec4i; 这四个向量每一层级代表一个轮廓
findContours(imgDil, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); // CV_CHAIN_APPROX_SIMPLE - 简单的链式接近法
drawContours(img, contours, -1, Scalar(255,0,255),2); // contouridx = -1 代表需要绘制所检测的所有轮廓
for(int i = 0;i <contours.size();i++)
{
int area = contourArea(contours[i]) ; // 计算轮廓面积函数
if(area > 1000)
{
drawContours(img,contours,i,Scalar(255, 0, 255), 2);
}
}
}
运行结果:
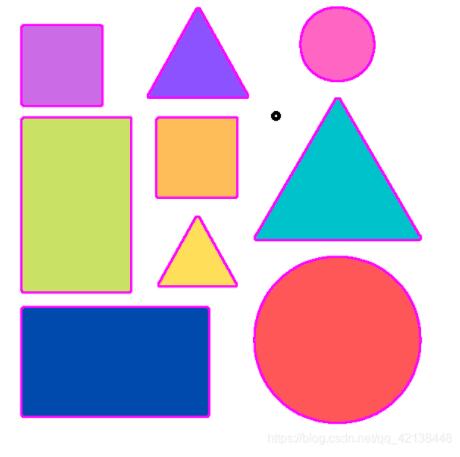
可见我们已经成功将瑕疵滤除。
三、判断轮廓形状
判断轮廓之前,我们先要将图形的拐角点计算出来,如三角形有三个拐角点,矩形有四个拐角点,圆形有多个拐角点,所以如何得到拐角点是我们检测轮廓形状的前提。检测拐角的核心函数为approxPolyDP(contours[i],conpoly[i],0.02* peri,true);即多边形拟合函数。
程序:
#include <iostream>
#include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚
#include <opencv2/imgcodecs.hpp> // 图像头文件
#include <opencv2/imgproc.hpp> // 图像处理头文件
using namespace std;
using namespace cv;
/*要进行图像形貌检测之前
*首先要二值化,再进行滤波处理,再进行Canny边缘检测
*最后才能检测出图形轮廓
*/
Mat imgGray, imgBlur, imgCanny,imgDil;
void getContours(Mat imgDil,Mat& img);
int main()
{
string path = "resources/shapes.png"; // 导入图形的时候,先要在右边点击显示所有文件!!!
Mat img = imread(path); // 在opencv 中所有的图像信息都使用Mat
// pre-processing image 图像预处理
cvtColor(img, imgGray, COLOR_BGR2GRAY);
GaussianBlur(imgGray, imgBlur,Size(3,3),3,0); // 高斯滤波
Canny(imgBlur, imgCanny, 25, 75);// Canny 边缘检测
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); // 其中 Size 和 边缘检测的放大倍数有关系
dilate(imgCanny, imgDil, kernel);
getContours(imgDil,img); // 第一个参数 是寻找轮廓的参数, 第二个参数是显示图案的参数
imshow("Image", img);
//imshow("Image Gray", imgGray);
//imshow("Image Blur", imgBlur);
//imshow("Image Canny", imgCanny);
//imshow("Image Dilate", imgDil); // 图像放大之后的边缘检测效果要明显好于 Canny 边缘检测,这也是为什么大佬热衷于dilation的原因
waitKey(0); // 延时,0即相当于无穷大
}
// 因为一开始参数不同,所以电脑直接将其视为重载函数
void getContours(Mat imgDil, Mat& img)
{
/* contour is a vector inside that vector there is more vector
* {{Point(20,30),Point(50,60)},{},{}} each vector like a contour and each contour have some points
*
**/
vector<vector<Point>> contours;
vector<Vec4i> hierarchy; // Vec4i 即代表该向量内有4个 int 变量typedef Vec<int, 4> Vec4i; 这四个向量每一层级代表一个轮廓
findContours(imgDil, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); // CV_CHAIN_APPROX_SIMPLE - 简单的链式接近法
//drawContours(img, contours, -1, Scalar(255,0,255),2); // contouridx = -1 代表需要绘制所检测的所有轮廓
vector<vector<Point>> conpoly(contours.size());// conpoly(paprameter1) ,paprameter1便代表vector对象的行数,而其列数中的vector 是使用了point点集但其只包含图形的拐角点集
vector<Rect> boundRect(contours.size());// Rect 类中x y 函数描述的是图形左上角的坐标
string objType; // 记录物体形状
// 为了滤除微小噪声,因此计算area 的面积
for (int i = 0; i < contours.size(); i++) // 关于contours.size()为什么是返回二维数组的行,因为 vector::size()函数只接受vector 对象的调用而contours的所有行(不管列)均为其对象
{
int area = contourArea(contours[i]);
if (area > 1000)
{
float peri = arcLength(contours[i], true);// 该函数计算轮廓的长度,后面的bool值表面轮廓曲线是否闭合若为true 则轮廓曲线闭合
//寻找角点
// conpoly 同样为轮廓点集但它第二个数组中只有1-9个参数为了描述各个轮廓的拐角点
approxPolyDP(contours[i],conpoly[i],0.02* peri,true); // conpoly[i]是输出array 0.02*peri 这个参数理解不了就不要理解!!! 最后一个参数仍然是询问是否闭合
cout << conpoly[i].size() << endl; // 输出图像轮廓中的拐角点
boundRect[i] = boundingRect(conpoly[i]); // 针对conpoly[i] 进行boundingRect 以
drawContours(img, conpoly, i, Scalar(255, 0, 255), 2);
//rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5);
}
}
}
运行结果:
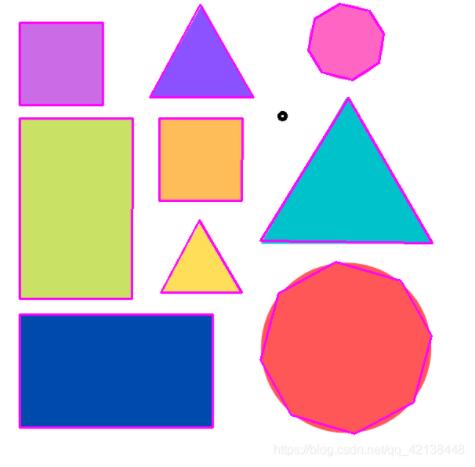
当检测出所有图形都应具有拐角点数之后,在加个if 判断图形的点数,之后通过puttext函数去显示,图形的形状。
程序:
#include <iostream>
#include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚
#include <opencv2/imgcodecs.hpp> // 图像头文件
#include <opencv2/imgproc.hpp> // 图像处理头文件
using namespace std;
using namespace cv;
/*要进行图像形貌检测之前
*首先要二值化,再进行滤波处理,再进行Canny边缘检测
*最后才能检测出图形轮廓
*/
Mat imgGray, imgBlur, imgCanny,imgDil;
void getContours(Mat imgDil,Mat& img);
int main()
{
string path = "resources/shapes.png"; // 导入图形的时候,先要在右边点击显示所有文件!!!
Mat img = imread(path); // 在opencv 中所有的图像信息都使用Mat
// pre-processing image 图像预处理
cvtColor(img, imgGray, COLOR_BGR2GRAY);
GaussianBlur(imgGray, imgBlur,Size(3,3),3,0); // 高斯滤波
Canny(imgBlur, imgCanny, 25, 75);// Canny 边缘检测
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); // 其中 Size 和 边缘检测的放大倍数有关系
dilate(imgCanny, imgDil, kernel);
getContours(imgDil,img); // 第一个参数 是寻找轮廓的参数, 第二个参数是显示图案的参数
imshow("Image", img);
//imshow("Image Gray", imgGray);
//imshow("Image Blur", imgBlur);
//imshow("Image Canny", imgCanny);
//imshow("Image Dilate", imgDil); // 图像放大之后的边缘检测效果要明显好于 Canny 边缘检测,这也是为什么大佬热衷于dilation的原因
waitKey(0); // 延时,0即相当于无穷大
}
// 因为一开始参数不同,所以电脑直接将其视为重载函数
void getContours(Mat imgDil, Mat& img)
{
/* contour is a vector inside that vector there is more vector
* {{Point(20,30),Point(50,60)},{},{}} each vector like a contour and each contour have some points
*
**/
vector<vector<Point>> contours;
vector<Vec4i> hierarchy; // Vec4i 即代表该向量内有4个 int 变量typedef Vec<int, 4> Vec4i; 这四个向量每一层级代表一个轮廓
findContours(imgDil, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); // CV_CHAIN_APPROX_SIMPLE - 简单的链式接近法
//drawContours(img, contours, -1, Scalar(255,0,255),2); // contouridx = -1 代表需要绘制所检测的所有轮廓
vector<vector<Point>> conpoly(contours.size());// conpoly(paprameter1) ,paprameter1便代表vector对象的行数,而其列数中的vector 是使用了point点集但其只包含图形的拐角点集
vector<Rect> boundRect(contours.size());// Rect 类中x y 函数描述的是图形左上角的坐标
string objType; // 记录物体形状
// 为了滤除微小噪声,因此计算area 的面积
for (int i = 0; i < contours.size(); i++) // 关于contours.size()为什么是返回二维数组的行,因为 vector::size()函数只接受vector 对象的调用而contours的所有行(不管列)均为其对象
{
int area = contourArea(contours[i]);
if (area > 1000)
{
float peri = arcLength(contours[i], true);// 该函数计算轮廓的长度,后面的bool值表面轮廓曲线是否闭合若为true 则轮廓曲线闭合
//寻找角点
// conpoly 同样为轮廓点集但它第二个数组中只有1-9个参数为了描述各个轮廓的拐角点
approxPolyDP(contours[i],conpoly[i],0.02* peri,true); // conpoly[i]是输出array 0.02*peri 这个参数理解不了就不要理解!!! 最后一个参数仍然是询问是否闭合
//drawContours(img, contours , i, Scalar(255, 0, 255), 2);
// 通过conpoly 而绘制的轮廓中只存在程序认为应该存在的点
cout << conpoly[i].size() << endl; // 输出图像轮廓中的拐角点
boundRect[i] = boundingRect(conpoly[i]); // 针对conpoly[i] 进行boundingRect 以便拟合相切矩形
//rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5); // 使用
int objCor = (int)conpoly[i].size(); // 计算物体边角数
if (3 == objCor) objType = "Triangle";
else
if (4 == objCor)
{ // 计算float对象,一定要记得使用 float 强转符号
float aspRatio = (float)boundRect[i].width/(float)boundRect[i].height;
if(aspRatio<1.05 && aspRatio>0.95)
objType = "Square";
else objType = "Rectangle";
}
else if (objCor > 4) objType = "Circle";
putText(img, objType, Point(boundRect[i].x, boundRect[i].y-5), FONT_HERSHEY_PLAIN, 1, Scalar(0, 69, 255), 1);
drawContours(img, conpoly, i, Scalar(255, 0, 255), 2);
//rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5);
}
}
}
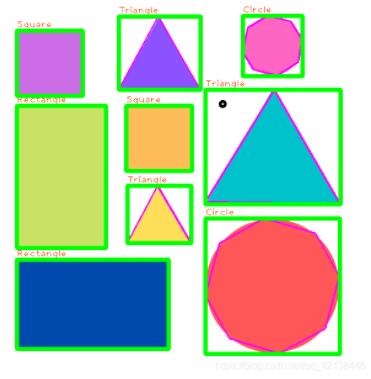
运行结果:
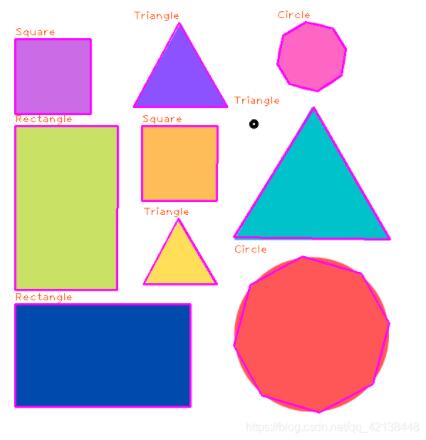
四、给被检测图形套上一个检测框
核心函数,使用rectangle()进行矩形绘画。
程序:
#include <iostream>
#include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚
#include <opencv2/imgcodecs.hpp> // 图像头文件
#include <opencv2/imgproc.hpp> // 图像处理头文件
using namespace std;
using namespace cv;
/*要进行图像形貌检测之前
*首先要二值化,再进行滤波处理,再进行Canny边缘检测
*最后才能检测出图形轮廓
*/
Mat imgGray, imgBlur, imgCanny,imgDil;
void getContours(Mat imgDil,Mat& img);
int main()
{
string path = "resources/shapes.png"; // 导入图形的时候,先要在右边点击显示所有文件!!!
Mat img = imread(path); // 在opencv 中所有的图像信息都使用Mat
// pre-processing image 图像预处理
cvtColor(img, imgGray, COLOR_BGR2GRAY);
GaussianBlur(imgGray, imgBlur,Size(3,3),3,0); // 高斯滤波
Canny(imgBlur, imgCanny, 25, 75);// Canny 边缘检测
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3)); // 其中 Size 和 边缘检测的放大倍数有关系
dilate(imgCanny, imgDil, kernel);
getContours(imgDil,img); // 第一个参数 是寻找轮廓的参数, 第二个参数是显示图案的参数
imshow("Image", img);
//imshow("Image Gray", imgGray);
//imshow("Image Blur", imgBlur);
//imshow("Image Canny", imgCanny);
//imshow("Image Dilate", imgDil); // 图像放大之后的边缘检测效果要明显好于 Canny 边缘检测,这也是为什么大佬热衷于dilation的原因
waitKey(0); // 延时,0即相当于无穷大
}
// 因为一开始参数不同,所以电脑直接将其视为重载函数
void getContours(Mat imgDil, Mat& img)
{
/* contour is a vector inside that vector there is more vector
* {{Point(20,30),Point(50,60)},{},{}} each vector like a contour and each contour have some points
*
**/
vector<vector<Point>> contours;
vector<Vec4i> hierarchy; // Vec4i 即代表该向量内有4个 int 变量typedef Vec<int, 4> Vec4i; 这四个向量每一层级代表一个轮廓
findContours(imgDil, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); // CV_CHAIN_APPROX_SIMPLE - 简单的链式接近法
//drawContours(img, contours, -1, Scalar(255,0,255),2); // contouridx = -1 代表需要绘制所检测的所有轮廓
vector<vector<Point>> conpoly(contours.size());// conpoly(paprameter1) ,paprameter1便代表vector对象的行数,而其列数中的vector 是使用了point点集但其只包含图形的拐角点集
vector<Rect> boundRect(contours.size());// 记录各图形的拟合矩形
string objType; // 记录物体形状
// 为了滤除微小噪声,因此计算area 的面积
for (int i = 0; i < contours.size(); i++) // 关于contours.size()为什么是返回二维数组的行,因为 vector::size()函数只接受vector 对象的调用而contours的所有行(不管列)均为其对象
{
int area = contourArea(contours[i]);
if (area > 1000)
{
float peri = arcLength(contours[i], true);// 该函数计算轮廓的长度,后面的bool值表面轮廓曲线是否闭合若为true 则轮廓曲线闭合
//寻找角点
// conpoly 同样为轮廓点集但它第二个数组中只有1-9个参数为了描述各个轮廓的拐角点
approxPolyDP(contours[i],conpoly[i],0.02* peri,true); // conpoly[i]是输出array 0.02*peri 这个参数理解不了就不要理解!!! 最后一个参数仍然是询问是否闭合
//drawContours(img, contours , i, Scalar(255, 0, 255), 2);
// 通过conpoly 而绘制的轮廓中只存在程序认为应该存在的点
cout << conpoly[i].size() << endl; // 输出图像轮廓中的拐角点
boundRect[i] = boundingRect(conpoly[i]); // 针对conpoly[i] 进行boundingRect 以便拟合相切矩形
//rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5); // 使用
int objCor = (int)conpoly[i].size(); // 计算物体边角数
if (3 == objCor) objType = "Triangle";
else
if (4 == objCor)
{ // 计算float对象,一定要记得使用 float 强转符号
float aspRatio = (float)boundRect[i].width/(float)boundRect[i].height;
if(aspRatio<1.05 && aspRatio>0.95)
objType = "Square";
else objType = "Rectangle";
}
else if (objCor > 4) objType = "Circle";
putText(img, objType, Point(boundRect[i].x, boundRect[i].y-5), FONT_HERSHEY_PLAIN, 1, Scalar(0, 69, 255), 1);
drawContours(img, conpoly, i, Scalar(255, 0, 255), 2);
rectangle(img, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 5);
}
}
}
运行结果:
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-
OpenCV 轮廓检测的实现方法
轮廓概述 轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度.轮廓在形状分析和物体的检测和识别中很有用. 为了更加准确,要使用二值化图像.在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测. 查找轮廓的函数会修改原始图像.如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中. 在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体,要找的物体应该是白色而背景应该是黑色. 轮廓检测的作用: 1.可以检测图图像或者视频中物体的轮廓 2.计算
-
Opencv二帧差法检测运动目标与提取轮廓
Opencv学习之二帧差法运动目标检测与轮廓提取 ,供大家参考,具体内容如下 代码是从网上摘抄学习的,加了好多注释,感觉就像边看书边做笔记一样,给人以满足的享受.Let's do this! #include "highgui.h" #include "cv.h" #include "stdio.h" #include <time.h> #include <math.h> #include <string.h>
-

OpenCV实现图像轮廓检测以及外接矩形
前两篇博文分别介绍了图像的边缘检测和轮廓检测,本文接着介绍图像的轮廓检测和轮廓外接矩形: 一.代码部分: // extract_contours.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include<cv.h> #include<highgui.h> using namespace cv; using namespace std; int _tmain(int argc, _TCHAR* argv[]) { /
-
opencv实现图形轮廓检测
要想实现轮廓检测,首先我们需要对待检测的图像进行图像处理: 图像灰度化.高斯滤波.Canny 边缘检测.边缘检测放大处理.提取轮廓. 一.实现简单的全图型检测 即只要将drawContours第三个参数设置为-1 既能实现图像的全图型检测. 程序: #include <iostream> #include <opencv2/highgui.hpp> // 说是说gui 具体什么gui 不清楚 #include <opencv2/imgcodecs.hpp> // 图像头
-
opencv python 图像轮廓/检测轮廓/绘制轮廓的方法
图像的轮廓检测,如计算多边形外界.形状毕竟.计算感兴趣区域等. Contours : Getting Started 轮廓 简单地解释为连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度. 轮廓是形状分析和物体检测和识别的有用工具 NOTE 为获得更好的准确性,请使用二值图,在找到轮廓之前,应用阈值法或canny边缘检测 从OpenCV 3.2开始,findContours()不再修改源图像,而是将修改后的图像作为三个返回参数中的第一个返回 在OpenCV中,查找轮廓是从黑色背景中查找白色对
-
Python使用Opencv实现边缘检测以及轮廓检测的实现
边缘检测 Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化. Canny边缘检测器算法基本步骤: 平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声. 计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直.水平和斜对角.这一步的输出用于在下一步中计算真正的边缘. 非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于
-
Python OpenCV实现图形检测示例详解
目录 1. 轮廓识别与描绘 1.1 cv2.findComtours()方法 1.2 cv2.drawContours() 方法 1.3 代码示例 2. 轮廓拟合 2.1 矩形包围框拟合 - cv2.boundingRect() 2.2圆形包围框拟合 - cv2.minEnclosingCircle() 3. 凸包 绘制 4. Canny边缘检测 - cv2.Canny() 4.1 cv2.Canny() 用法简介 4.2 代码示例 5. 霍夫变换 5.1 概述 5.2 cv2.HoughLin
-
python+opencv轮廓检测代码解析
首先大家可以对OpenCV有个初步的了解,可以参考:简单了解OpenCV 轮廓(Contours),指的是有相同颜色或者密度,连接所有连续点的一条曲线.检测轮廓的工作对形状分析和物体检测与识别都非常有用. 在轮廓检测之前,首先要对图片进行二值化或者Canny边缘检测.在OpenCV中,寻找的物体是白色的,而背景必须是黑色的,因此图片预处理时必须保证这一点. import cv2 #读入图片 img = cv2.imread("1.png") # 必须先转化成灰度图 gray = cv2
-
OpenCV实现轮廓检测与绘制
图像的轮廓不仅能够提供物体的边缘,而且还能提供物体边缘之间的层次关系以及拓扑关系. 带有结构关系的边缘检测,这种结构关系可以表明图像中连通域或者某些区域之间的关系. 图为一个具有4个不连通边缘的二值化图像,由外到内依次为0号.1号.2号.3号条边缘.为了描述不同轮廓之间的结构关系,定义由外到内的轮廓级别越来越低,也就是高一层级的轮廓包围着较低层级的轮廓,被同一个轮廓包围的多个不互相包含的轮廓是同一层级轮廓.例如在图中,0号轮廓层级比1号和第2号轮廓的层及都要高,2号轮廓包围着3号轮廓,因此2号轮
-
OpenCV轮廓检测之boundingRect绘制矩形边框
目录 函数原型 参数说明 测试代码 测试效果 补充 函数原型 cv::Rect boundingRect( InputArray array ); 参数说明 输入:InputArray类型的array,输入灰度图像或二维点集. 输出:Rect类型的矩形信息,包括矩形尺寸和位置. 测试代码 #include <iostream> #include <time.h> #include <opencv2/opencv.hpp> using namespace std; usi
-
Python下opencv使用hough变换检测直线与圆
在数字图像中,往往存在着一些特殊形状的几何图形,像检测马路边一条直线,检测人眼的圆形等等,有时我们需要把这些特定图形检测出来,hough变换就是这样一种检测的工具. Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等). 关于hough变换,核心以及难点就是关于就是有原始空间到参数空间的变换上.以直线检测为例,假设有一条直线L,