OpenCV-Python实现轮廓的特征值
前言
轮廓自身的一些属性特征及轮廓所包围对象的特征对于描述图像具有重要意义。本篇博文将介绍几个轮廓自身的属性特征及轮廓包围对象的特征。
宽高比
在轮廓中,我们可以通过宽高比来描述轮廓,例如矩形的轮廓宽高比为:
宽高比=宽度/高度
下面,我们来计算矩形轮廓的宽高比,代码如下:
import cv2
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 3)
cv2.imshow("img1", img)
aspectRatio=float(w)/h
print(aspectRatio)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,我们可以得到轮廓的宽高比约为3:
Extend
我们还可以使用轮廓面积与矩形边界面积之比Extend来描述图像及其轮廓特征,数学计算公式图下:
Extend=轮廓面积/矩形边界面积
下面,我们来计算Extend,代码如下:
import cv2
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
rectArea=w*h#矩形边界面积
cntArea=cv2.contourArea(contours[0])#轮廓面积
extend=float(cntArea)/rectArea
print(extend)
本例中,轮廓面积与矩形边界面积的比值Extend大约为0.8:
Solidity
我们还可以使用轮廓面积与凸包面积之比Solidity来衡量图像,轮廓以及凸包的特征。其数学计算公式为:
Slidity=轮廓面积/凸包面积
下面,我们来计算Slidity,代码如下:
import cv2
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
cntArea=cv2.contourArea(contours[0])#轮廓面积
hull=cv2.convexHull(contours[0])
hullArea=cv2.contourArea(hull)#凸包面积
solidity=float(cntArea)/hullArea
print(solidity)
运行之后,本例轮廓面积与凸包面积的比值solidity约为1:
等效直径
在OpenCV中,我们还可以使用等效直径来衡量轮廓的特征值,该值是与轮廓面积相等的圆形的直径。其数学计算公式为:
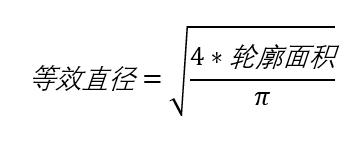
下面,我们来计算与轮廓面积相等的圆形直径,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
cntArea=cv2.contourArea(contours[0])#轮廓面积
equiDiameter=np.sqrt(4*cntArea/np.pi)
print(equiDiameter)
cv2.circle(img,(100,100),int(equiDiameter/2),(0,255,0),3)
cv2.imshow("img1",img)
cv2.waitKey()
cv2.destroyAllWindows()
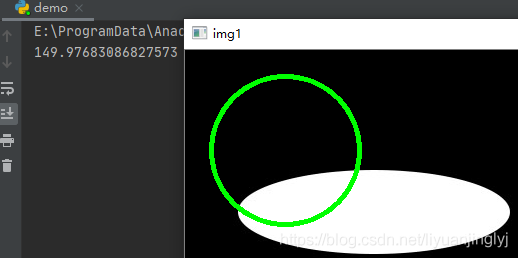
运行之后,我们得到其等效直径约为145:
方向
在OpenCV中,函数cv2.fitEllipse()可以用来构建最优拟合椭圆,还可以在返回值内分别返回椭圆的中心点,轴长,旋转角度信息。使用这种形式,能够直观地获取椭圆的方向等信息。
函数cv2.fitEllipse()返回值为:
(x,y):椭圆的中心点
(MA,ma):椭圆水平方向轴与垂直方向轴的长度
angle:椭圆的旋转角度
import cv2
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
ellipsis=cv2.fitEllipse(contours[0])
(x, y), (MA, ma), angle = cv2.fitEllipse(contours[0])
print((x, y), (MA, ma), angle)
cv2.ellipse(img, ellipsis, (0, 255, 0), 2)
cv2.imshow("img1", img)
cv2.waitKey()
cv2.destroyAllWindows()
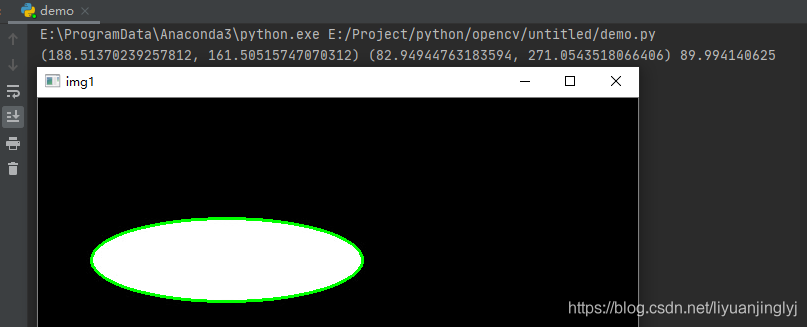
本来就是椭圆图,下面拟合后正好也是椭圆:
掩摸和像素点
有时候,我们还像获取某对象的掩摸图像及其对应的点。在OpenCV中,它还提供了cv2.findNonZero()函数用于获取一个图像内的轮廓点位置,其完整定义如下:
def findNonZero(src, idx=None):
src:要查找非零元素的图像
idx:返回值,表示非0元素的索引位置。具体格式为(行号,列号)
下面,我们实测该函数,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
mask=np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask,[contours[0]],0,255,2)
pixelpoints=cv2.findNonZero(mask)
print(pixelpoints)
cv2.imshow("img1", mask)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,我们会得到轮廓点位置:

最大值,最小值以及它们的位置
在OpenCV中,它提供cv2.minMaxLoc()函数获取指定对象内最大值,最小值以及位置等信息,其完整定义如下:
def minMaxLoc(src, mask=None):
src:单通道图像
mask:掩摸,通过使用掩摸图像,得到掩膜指定区域内的最值信息
该函数返回4个值:最小值,最大值,最小值位置,最大值位置。
下面,我们来获取这些值,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
mask = np.zeros(gray.shape, np.uint8)
cv2.drawContours(mask, [contours[0]], 0, 255, 2)
min, max, min_loc, max_loc = cv2.minMaxLoc(gray, mask)
print(min, max, min_loc, max_loc)
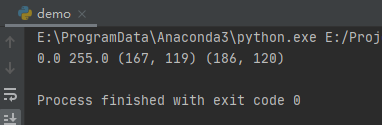
运行之后,控制台输出4个值:
平均颜色及平均灰度
在OpenCV中,它给我们提供cv2.mean()函数计算一个对象的平均颜色与平均灰度。其完整定义如下:
def mean(src, mask=None):
参数与上面两个小节一样,这里不在赘述。下面,我们来使用这个函数,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
mask=np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask,[contours[0]],0,255,2)
mean=cv2.mean(img,mask)
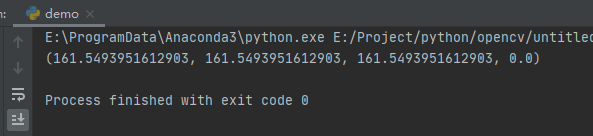
运行之后,输出4个值:RGB以及A通道的均值:
极点
有时候,我们希望获取某个对象内的极点,比如最左,最右,最上,最下等。在OpenCV中,它给我们提供了以下方法进行获取:
left=tuple(cnt[cnt[:,:,0].argmin()][0]) right=tuple(cnt[cnt[:,:,0].argmax()][0]) top=tuple(cnt[cnt[:,:,1].argmin()][0]) bottom=tuple(cnt[cnt[:,:,1].argmax()][0])
下面,我们来通过这些方法获取,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
mask = np.zeros(img.shape, np.uint8)
cnt = contours[0]
left = tuple(cnt[cnt[:, :, 0].argmin()][0])
right = tuple(cnt[cnt[:, :, 0].argmax()][0])
top = tuple(cnt[cnt[:, :, 1].argmin()][0])
bottom = tuple(cnt[cnt[:, :, 1].argmax()][0])
print(left, right, top, bottom)
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img, "left", left, font, 1, (0, 255, 0), 2)
cv2.putText(img, "right", right, font, 1, (0, 255, 0), 2)
cv2.putText(img, "top", top, font, 1, (0, 255, 0), 2)
cv2.putText(img, "bottom", bottom, font, 1, (0, 255, 0), 2)
cv2.imshow("result",img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,值与效果如下:

到此这篇关于OpenCV-Python实现轮廓的特征值的文章就介绍到这了,更多相关OpenCV 轮廓的特征值内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Python Opencv实现图像轮廓识别功能
本文实例为大家分享了python opencv识别图像轮廓的具体代码,供大家参考,具体内容如下 要求:用矩形或者圆形框住图片中的云朵(不要求全部框出) 轮廓检测 Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓. import cv2 img = cv2.imread('cloud.jpg') # 灰度图像 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 二值化 ret, binary = cv2.th
-
Opencv实现轮廓提取功能
轮廓:一个轮廓代表一系列的点(像素),这一系列的点构成一个有序的点集,所以可以把一个轮廓理解为一个有序的点集. 在opencv中,提供了一个函数返回一个有序的点集或者有序的点集的集合(指多个有序的点集),函数findContour是从二值图像中来计算轮廓的,一般使用Canny()函数处理后的图像,因为这样的图像含有边缘像素. 寻找轮廓的API函数: findContours(image,vector<vector<Point>> contours,vector<Vec4i&g
-
Python通过OpenCV的findContours获取轮廓并切割实例
1 获取轮廓 OpenCV2获取轮廓主要是用cv2.findContours import numpy as np import cv2 im = cv2.imread('test.jpg') imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours, hierarchy = cv2.findContours(thresh,cv2.RETR_T
-
opencv python 图像轮廓/检测轮廓/绘制轮廓的方法
图像的轮廓检测,如计算多边形外界.形状毕竟.计算感兴趣区域等. Contours : Getting Started 轮廓 简单地解释为连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度. 轮廓是形状分析和物体检测和识别的有用工具 NOTE 为获得更好的准确性,请使用二值图,在找到轮廓之前,应用阈值法或canny边缘检测 从OpenCV 3.2开始,findContours()不再修改源图像,而是将修改后的图像作为三个返回参数中的第一个返回 在OpenCV中,查找轮廓是从黑色背景中查找白色对
-
opencv3/C++轮廓的提取与筛选方式
轮廓提取 findContours发现轮廓 findContours( InputOutputArray binImg, //输入8bit图像,0值像素值不变,非0的像素看成1:(变为二值图像) OutputArrayOfArrays contours,//输出找到的轮廓对象 OutputArray, hierachy// 图像的拓扑结构 int mode, //轮廓返回的模式(RETR_TREE等) int method,//发现方法(CHAIN_APPROX_SIMPLE等) Point o
-
Opencv提取连通区域轮廓的方法
本文实例为大家分享了Opencv提取连通区域轮廓的具体代码,供大家参考,具体内容如下 在进行图像分割后,可能需要对感兴趣的目标区域进行提取,比较常用的方法是计算轮廓. 通过轮廓可以获得目标的一些信息: (1)目标位置 (2)目标大小(即面积) (3)目标形状(轮廓矩) 当然,轮廓不一定代表希望目标区域,阈值分割时可能造成一部分信息丢失,因此可以计算轮廓的质心坐标,再进行漫水填充. 程序中有寻找质心+填充,但效果不好,因此就不放填充后的图了. 实验结果: #include "opencv2/img
-
OpenCV-Python实现轮廓检测实例分析
相比C++而言,Python适合做原型.本系列的文章介绍如何在Python中用OpenCV图形库,以及与C++调用相应OpenCV函数的不同之处.这篇文章介绍在Python中使用OpenCV检测并绘制轮廓. 提示: 转载请详细注明原作者及出处,谢谢! 本文介绍在OpenCV-Python中检测并绘制轮廓的方法. 本文不介详细的理论知识,读者可从其他资料中获取相应的背景知识.笔者推荐清华大学出版社的<图像处理与计算机视觉算法及应用(第2版)>. 轮廓检测 轮廓检测也是图像处理中经常用到的.Ope
-
python+opencv轮廓检测代码解析
首先大家可以对OpenCV有个初步的了解,可以参考:简单了解OpenCV 轮廓(Contours),指的是有相同颜色或者密度,连接所有连续点的一条曲线.检测轮廓的工作对形状分析和物体检测与识别都非常有用. 在轮廓检测之前,首先要对图片进行二值化或者Canny边缘检测.在OpenCV中,寻找的物体是白色的,而背景必须是黑色的,因此图片预处理时必须保证这一点. import cv2 #读入图片 img = cv2.imread("1.png") # 必须先转化成灰度图 gray = cv2
-
Opencv处理图像之轮廓提取
本文实例为大家分享了Opencv处理图像之轮廓提取,使用cvfindContours对图像进行轮廓检测,供大家参考,具体内容如下 #include<iostream> #include<opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp> int main() { IplImage* img = cvLoadImage("E:\\test.bmp",0); IplImage* img
-
OpenCV实现图像轮廓检测以及外接矩形
前两篇博文分别介绍了图像的边缘检测和轮廓检测,本文接着介绍图像的轮廓检测和轮廓外接矩形: 一.代码部分: // extract_contours.cpp : 定义控制台应用程序的入口点. // #include "stdafx.h" #include<cv.h> #include<highgui.h> using namespace cv; using namespace std; int _tmain(int argc, _TCHAR* argv[]) { /
-
OpenCV 轮廓检测的实现方法
轮廓概述 轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度.轮廓在形状分析和物体的检测和识别中很有用. 为了更加准确,要使用二值化图像.在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测. 查找轮廓的函数会修改原始图像.如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中. 在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体,要找的物体应该是白色而背景应该是黑色. 轮廓检测的作用: 1.可以检测图图像或者视频中物体的轮廓 2.计算