Python下opencv使用hough变换检测直线与圆
在数字图像中,往往存在着一些特殊形状的几何图形,像检测马路边一条直线,检测人眼的圆形等等,有时我们需要把这些特定图形检测出来,hough变换就是这样一种检测的工具。
Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等)。
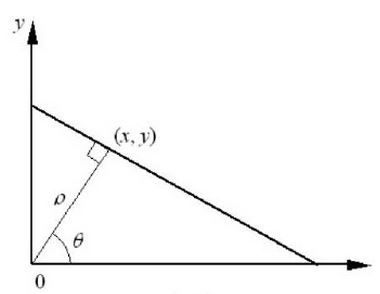
关于hough变换,核心以及难点就是关于就是有原始空间到参数空间的变换上。以直线检测为例,假设有一条直线L,原点到该直线的垂直距离为p,垂线与x轴夹角为 θ ,那么这条直线是唯一的,且直线的方程为 ρ=xcosθ+ysinθ , 如下图所示:
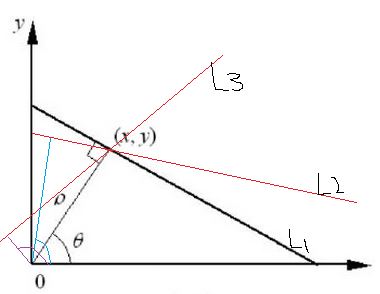
可以看到的是这条直线在极坐标系下只有一个 (ρ,θ) 与之对应,随便改变其中一个参数的大小,变换到空间域上的这个直线将会改变。好了,再回来看看这个空间域上的这条直线上的所有点吧,你会发现,这条直线上的所有点都可以是在极坐标为 (ρ,θ) 所表示的直线上的,为什么说是都可以在,因为其中随便的一个点也可以在其他的 (ρ,θ) 所表示的直线上,就比如上述的(x,y)吧,它可以再很多直线上,准确的说,在经过这个点的直线上,随便画两条如下:
可以看到,光是空间上的一个点在极坐标系下就可能在很多极坐标对所对应的直线上,具体有多少个极坐标对呢?那得看你的 θ 的步长了,我们可以看到 θ 无非是从0-360度( 0−2π )变化,假设我们没10度一走取一个直线(这个点在这个直线上),那么我们走一圈是不是取了36条直线,也就对应36个极坐标对没错吧,那么这个极坐标对,画在坐标轴上是什么样子的呢?因为 θ 是从 0−2π ,并且一个点定了,如果一个 θ 也定了,你想想它对应的直线的 ρ 会怎么样,自然也是唯一的。那么这个点在极坐标下对应的 (ρ,θ) 画出来一个周期可能就是这样的,以 θ 为x轴的话:
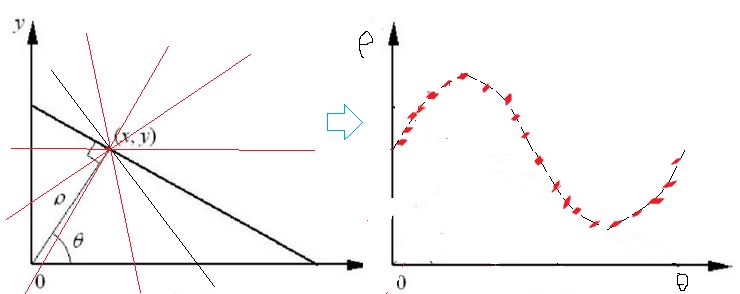
ok前面说的是单单这一个点对应的极坐标系下的参数对,那么如果每个点都这么找一圈呢?也就是每个点在参数空间上都对应一系列参数对吧,现在把它们华仔同一个坐标系下会怎么样呢?为了方便,假设在这个直线上取3个点画一下:
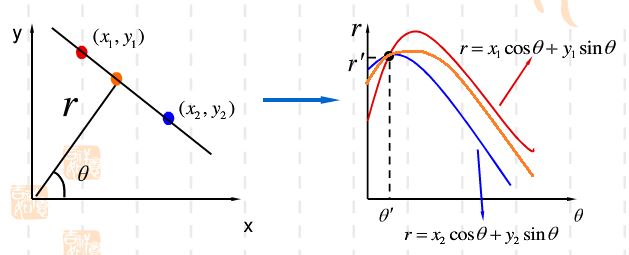
那么可以看到,首先对于每一个点,在极坐标下,会存在一个周期的曲线来表示通过这个点,其次,这三个极坐标曲线同时经过一个点,要搞清楚的是,极坐标上每一个点对 (ρ,θ) 在空间坐标上都是对应一条直线的。好了,同时经过的这一个点有什么含义呢?它表示在空间坐标系下,有一条直线可以经过点1,经过点2,经过点3,这是什么意思?说明这三个点在一条直线上吧。反过来再来看这个极坐标系下的曲线,那么我们只需要找到交点最多的点,把它返回到空间域就是这个需要找的直线了。为什么是找相交最多的点,因为上面这只是三个点的曲线,当空间上很多点都画出来的时候,那么相交的点可能就不知上述看到的一个点了,可能有多个曲线相交点,但是有一点,势必是一条直线上的所有点汇成的交点是曲线相交次数最多的。
再来分析这个算法。可以看到hough变换就是参数映射变换。对每一个点都进行映射,并且每一个映射还不止一次, (ρ,θ) 都是存在步长的,像一个点映射成一个 (ρ,θ) ,以 θ 取步长为例,当 θ 取得步长大的时候,映射的 (ρ,θ) 对少些,反之则多,但是我们有看到,映射后的点对是需要求交点的,上述画出来的曲线是连续的,然而实际上因为 θ 步长的存在,他不可能是连续的,像上上个图一样,是离散的。那么当 θ 步长取得比较大的时候,你还想有很多交点是不可能的,因为这个时候是离散的曲线然后再去相交,所以说 θ 步长不能太大,理论上是越小效果越好,因为越小,越接近于连续曲线,也就越容易相交,但是越小带来的问题就是需要非常多的内存,计算机不会有那么多内存给你的,并且越小,计算量越大,想想一个点就需要映射那么多次,每次映射是需要计算的,耗时的。那么再想想对于一副图像所有点都进行映射,随便假设一副100*100的图像(很小吧),就有10000个点,对每个点假设就映射36组 (ρ,θ) 参数(此时角度的步长是10度了,10度,已经非常大的一个概念了),那么总共需要映射360000次,在考虑每次映射计算的时间吧。可想而知,hough是多么耗时耗力。所以必须对其进行改进。首先就是对图像进行改进,100*100的图像,10000个点,是不是每个点都要计算?大可不必,我们只需要在开始把图像进行一个轮廓提取,一般使用canny算子就可以,生成黑白二值图像,白的是轮廓,那么在映射的时候,只需要把轮廓上的点进行参数空间变换,为什么提轮廓?想想无论检测图像中存在的直线呀圆呀,它们都是轮廓鲜明的。那么需要变换的点可能就从10000个点降到可能1000个点了,这也就是为什么看到许多hough变换提取形状时为什么要把图像提取轮廓,变成二值图像了。
继续算法,分析这么多,可想而知那么一个hough变换在算法设计上就可以如下步骤:
(1)将参数空间 (ρ,θ) 量化,赋初值一个二维矩阵M, M(ρ,θ) 就是一个累加器了。
(2)然后对图像边界上的每一个点进行变换,变换到属于哪一组 (ρ,θ) ,就把该组 (ρ,θ) 对应的累加器数加1,这里的需要变换的点就是上面说的经过边缘提取以后的图像了。
(3)当所有点处理完成后,就来分析得到的 M(ρ,θ) ,设置一个阈值T,认为当 M(ρ,θ)>T ,就认为存在一条有意义的直线存在。而对应的 M(ρ,θ) 就是这组直线的参数,至于T是多少,自己去式,试的比较合适为止。
(4)有了 M(ρ,θ) 和点(x,y)计算出来这个直线就ok了。
说了这么多,这就是原理上hough变换的最底层原理,事实上完全可以自己写程序去实现这些,然而,也说过,hough变换是一个耗时耗力的算法,自己写循环实现通常很慢,曾经用matlab写过这个,也有实际的hough变换例子可以看看:
function mean_circle = hough_circle(BW,step_r,step_angle,r_min,r_max,p)
%------------------------------算法概述-----------------------------
% 该算法通过a = x-r*cos(angle),b = y-r*sin(angle)将圆图像中的边缘点
% 映射到参数空间(a,b,r)中,由于是数字图像且采取极坐标,angle和r都取
% 一定的范围和步长,这样通过两重循环(angle循环和r循环)即可将原图像
% 空间的点映射到参数空间中,再在参数空间(即一个由许多小立方体组成的
% 大立方体)中寻找圆心,然后求出半径坐标。
%-------------------------------------------------------------------
%------------------------------输入参数-----------------------------
% BW:二值图像;
% step_r:检测的圆半径步长
% step_angle:角度步长,单位为弧度 :各度计算 1° = 0.0174
% 2° = 0.035
% 3° = 0.0524
% 4° = 0.0698
% 5° = 0.0872
% r_min:最小圆半径
% r_max:最大圆半径
% p:以p*hough_space的最大值为阈值,p取0,1之间的数
%-------------------------------------------------------------------
% --------对半径的大小范围规定问题--------
% ------ 实验中发现:外轮廓的半径范围在220~260之间
% 内轮廓的半径范围 60~80之间
% Note:: &&&&&&&&&&&当图像改变时半径范围需要改变&&&&&&&&&&&&
% question: 半径的范围差超过50将会显示内存不足,注意方案办法
%------------------------------输出参数-----------------------------
% hough_space:参数空间,h(a,b,r)表示圆心在(a,b)半径为r的圆上的点数
% hough_circl:二值图像,检测到的圆
% para:检测到的所有圆的圆心、半径
% mean_circle : 返回检测到的圆的平均位置及大小
%-------------------------------------------------------------------
[m,n] = size(BW); %取大小
size_r = round((r_max-r_min)/step_r)+1; %半径增加,循环次数
size_angle = round(2*pi/step_angle); %角度增加,循环次数
hough_space = zeros(m,n,size_r); %hough空间
[rows,cols] = find(BW);%把要检测的点存起来,只有白色(边缘)点需要变换
ecount = size(rows); %检测的点的个数
tic %%%% 计时开始位置
% Hough变换
% 将图像空间(x,y)对应到参数空间(a,b,r)
% a = x-r*cos(angle)
% b = y-r*sin(angle)
for i=1:ecount %点个数循环
for r=1:size_r %单个点在所有半径空间内检测
for k=1:size_angle %单个点在半径一定的所在圆内检测
a = round(rows(i)-(r_min+(r-1)*step_r)*cos(k*step_angle));
b = round(cols(i)-(r_min+(r-1)*step_r)*sin(k*step_angle));
if(a>0&a<=m&b>0&b<=n) %对应到某个圆上,记录之
hough_space(a,b,r) = hough_space(a,b,r)+1;
end
end
end
end
% 搜索超过阈值的聚集点
max_para = max(max(max(hough_space)));%找到最大值所在圆参数
index = find(hough_space>=max_para*p);%索引在一定范围内的圆参数
length = size(index);
toc %%%% 计时结束位置,通过计时观察运行效率,hough变换的一大缺点就是耗时
% 将索引结果转换为对应的行列(圆心)和半径大小
% 理解三维矩阵在内存中的存储方式可以理解公式的原理
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;%转换为圆心的y值
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;%转换为圆心的x值
par3 = r_min+(par3-1)*step_r; %转化为圆的半径
%储存在一起
para(:,k) = [par1,par2,par3]';
end
% 为提高准确性,求取一个大致的平均位置(而不是直接采用的最大值)
mean_circle = round(mean(para')');
那么我们在实际中大可不必自己写,opencv已经集成了hough变换的函数,调用它的函数效率高,也很简单。
Opencv中检测直线的函数有cv2.HoughLines(),cv2.HoughLinesP()
函数cv2.HoughLines()返回值有三个(opencv 3.0),实际是个二维矩阵,表述的就是上述的 (ρ,θ) ,其中 ρ 的单位是像素长度(也就是直线到图像原点(0,0)点的距离),而 θ 的单位是弧度。这个函数有四个输入,第一个是二值图像,上述的canny变换后的图像,二三参数分别是 ρ 和 θ 的精确度,可以理解为步长。第四个参数为阈值T,认为当累加器中的值高于T是才认为是一条直线。自己画了个图实验一下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('line.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度图像
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLines(edges,1,np.pi/180,160)
lines1 = lines[:,0,:]#提取为为二维
for rho,theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])
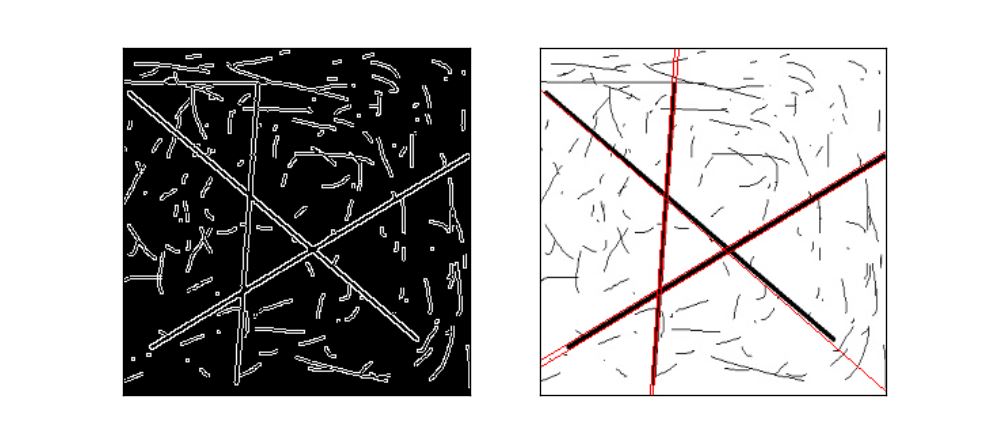
测试一个新的图,不停的改变 cv2.HoughLines最后一个阈值参数到合理的时候如下:
可以看到检测的还可以的。
函数cv2.HoughLinesP()是一种概率直线检测,我们知道,原理上讲hough变换是一个耗时耗力的算法,尤其是每一个点计算,即使经过了canny转换了有的时候点的个数依然是庞大的,这个时候我们采取一种概率挑选机制,不是所有的点都计算,而是随机的选取一些个点来计算,相当于降采样了。这样的话我们的阈值设置上也要降低一些。在参数输入输出上,输入不过多了两个参数:minLineLengh(线的最短长度,比这个短的都被忽略)和MaxLineCap(两条直线之间的最大间隔,小于此值,认为是一条直线)。输出上也变了,不再是直线参数的,这个函数输出的直接就是直线点的坐标位置,这样可以省去一系列for循环中的由参数空间到图像的实际坐标点的转换。
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('room.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度图像
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLinesP(edges,1,np.pi/180,30,minLineLength=60,maxLineGap=10)
lines1 = lines[:,0,:]#提取为二维
for x1,y1,x2,y2 in lines1[:]:
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])
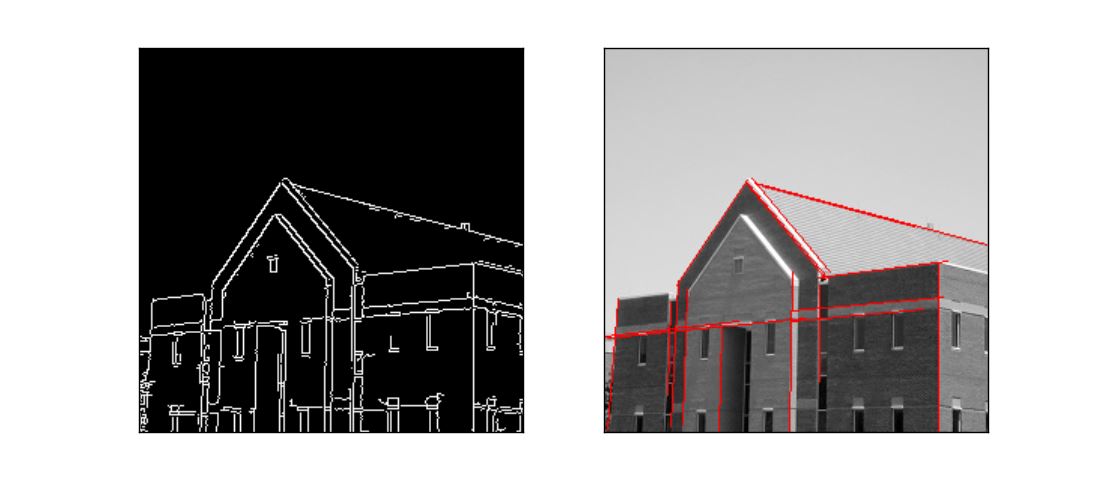
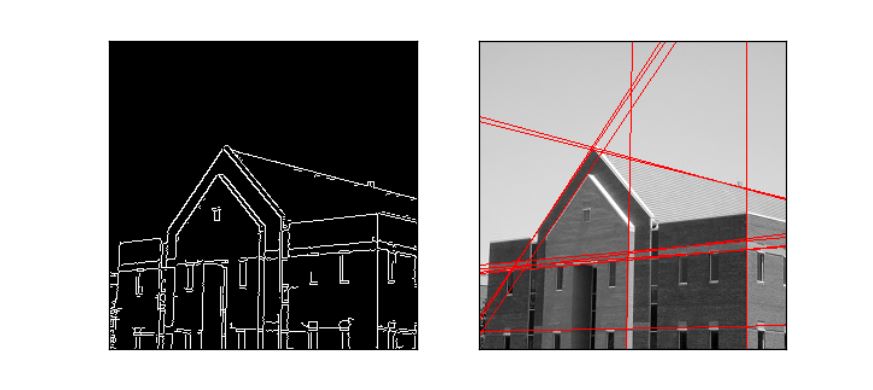
可以看到这个方法似乎更好些,速度还快,调参数得到较好的效果就ok了。
Ok说完了直线的检测,再来说说圆环的检测,我们知道圆的数学表示为:

从而一个圆的确定需要三个参数,那么就需要三层循环来实现(比直线的多一层),从容把图像上的所有点映射到三维参数空间上。其他的就一样了,寻找参数空间累加器的最大(或者大于某一阈值)的值。那么理论上圆的检测将比直线更耗时,然而opencv对其进行了优化,用了一种霍夫梯度法,感兴趣去研究吧,我们只要知道它能优化算法的效率就可以了。关于函数参数输入输出:
cv2.HoughCircles(image, method, dp, minDist, circles, param1, param2, minRadius, maxRadius)
这个时候输入为灰度图像,同时最好规定检测的圆的最大最小半径,不能盲目的检测,否侧浪费时间空间。输出就是三个参数空间矩阵。
来个实际点的人眼图像,把minRadius和maxRadius调到大圆范围检测如下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('eye.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度图像
plt.subplot(121),plt.imshow(gray,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
circles1 = cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,1,
100,param1=100,param2=30,minRadius=200,maxRadius=300)
circles = circles1[0,:,:]#提取为二维
circles = np.uint16(np.around(circles))#四舍五入,取整
for i in circles[:]:
cv2.circle(img,(i[0],i[1]),i[2],(255,0,0),5)#画圆
cv2.circle(img,(i[0],i[1]),2,(255,0,255),10)#画圆心
plt.subplot(122),plt.imshow(img)
plt.xticks([]),plt.yticks([])
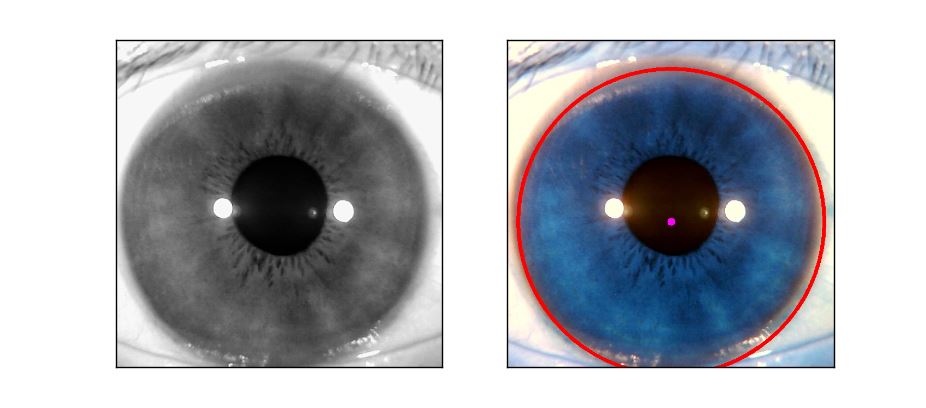
把半径范围调小点,检测内圆:
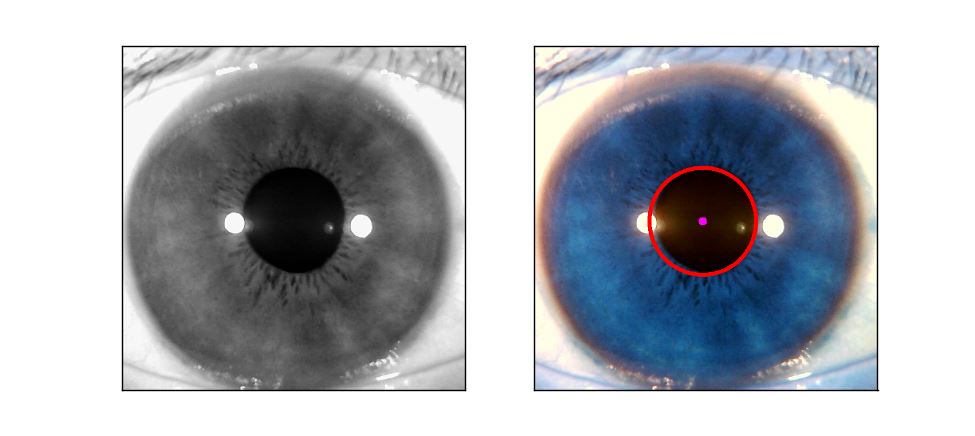
至此圆的检测就是这样。
到此这篇关于Python下opencv使用hough变换检测直线与圆的文章就介绍到这了,更多相关opencv hough变换检测直线与圆内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python opencv检测直线 cv2.HoughLinesP的实现
cv2.HoughLines()函数是在二值图像中查找直线,cv2.HoughLinesP()函数可以查找直线段. cv2.HoughLinesP()函数原型: HoughLinesP(image, rho, theta, threshold, lines=None, minLineLength=None, maxLineGap=None) image: 必须是二值图像,推荐使用canny边缘检测的结果图像: rho: 线段以像素为单位的距离精度,double类型的,推荐用1.0 theta:
-

Java+opencv3.2.0实现hough直线检测
hough变换是图像处理中的一种特征提取技术,该过程在一个参数空间中通过计算累计结果的局部最大值得到一个符合特定形状的集合作为hough变换结果. 发展史: 1962年由PaulHough首次提出,用来检测直线和曲线. 1972年由Richard Duda & Peter Hart推广使用,扩展到任意形状物体的识别. 原理: 一条直线在直角坐标系下的表示形式为y=k*x+b,而在极坐标系下表示为r=x*cos(theta)+y*sin(theta).hough变换的思想为在直角坐标系下的一个点对
-
Java+opencv3.2.0实现hough圆检测功能
hough圆检测和hough线检测的原理近似,对于圆来说,在参数坐标系中表示为C:(x,y,r). 函数: Imgproc.HoughCircles(Mat image, Mat circles, int method, double dp, double minDist, double param1, double param2, int minRadius, int maxRadius) 参数说明: image:源图像 circles:检测到的圆的输出矢量(x,y,r) method:使用的
-
Opencv2.4.9函数HoughLinesP分析
标准霍夫变换本质上是把图像映射到它的参数空间上,它需要计算所有的M个边缘点,这样它的运算量和所需内存空间都会很大.如果在输入图像中只是处理m(m<M)个边缘点,则这m个边缘点的选取是具有一定概率性的,因此该方法被称为概率霍夫变换(Probabilistic Hough Transform).该方法还有一个重要的特点就是能够检测出线端,即能够检测出图像中直线的两个端点,确切地定位图像中的直线. HoughLinesP函数就是利用概率霍夫变换来检测直线的.它的一般步骤为: 1.随机抽取图像中的一个特
-
Opencv Hough算法实现图片中直线检测
本文实例为大家分享了Opencv Hough算法实现直线检测的具体代码,供大家参考,具体内容如下 (1)载入需检测的图及显示原图 Mat g_srcImage = imread("C:\\Users\\lenovo\\Pictures\\Saved Pictures\\Q.jpg"); //图片所放路径 imshow("[原始图]", g_srcImage); (2)为显示不同的效果图而设置滑动条 namedWindow("[效果图]", 1);
-
OpenCV霍夫变换(Hough Transform)直线检测详解
霍夫变换(Hough Transform)的主要思想: 一条直线在平面直角坐标系(x-y)中可以用y=ax+b式表示,对于直线上一个确定的点(x0,y0),总符合y0-ax0=b,而它可以表示为参数平面坐标系(a-b)中的一条直线.因此,图像中的一个点对应参数平面的一条直线,同样,图像中的一条直线对应参数平面上的一个点. 基本Hough变换检测直线: 由于同一条直线上的不同点在参数平面中是会经过同一个点的多条线.对图像的所有点作霍夫变换,检测直线就意味着找到对应参数平面中的直线相交最多的点.对这
-
利用Opencv中Houghline方法实现直线检测
利用Opencv中的Houghline方法进行直线检测-python语言 这是给Python部落翻译的文章,请在这里看原文. 在图像处理中,霍夫变换用来检测任意能够用数学公式表达的形状,即使这个形状被破坏或者有点扭曲. 下面我们将看到利用HoughLine算法来阐述霍夫变化进行直线检测的原理,把此算法应用到特点图像的边缘检测是可取的.边缘检测方法请参考这篇文章–边缘检测. Houghline算法基础 直线可以表示为y=mx+c,或者以极坐标形式表示为r=xcosθ+ysinθ,其中r是原点到直线
-
Python下opencv使用hough变换检测直线与圆
在数字图像中,往往存在着一些特殊形状的几何图形,像检测马路边一条直线,检测人眼的圆形等等,有时我们需要把这些特定图形检测出来,hough变换就是这样一种检测的工具. Hough变换的原理是将特定图形上的点变换到一组参数空间上,根据参数空间点的累计结果找到一个极大值对应的解,那么这个解就对应着要寻找的几何形状的参数(比如说直线,那么就会得到直线的斜率k与常熟b,圆就会得到圆心与半径等等). 关于hough变换,核心以及难点就是关于就是有原始空间到参数空间的变换上.以直线检测为例,假设有一条直线L,
-
python hough变换检测直线的实现方法
1 原理 2 检测步骤 将参数空间(ρ,θ) 量化成m*n(m为ρ的等份数,n为θ的等份数)个单元,并设置累加器矩阵,初始值为0: 对图像边界上的每一个点(x,y)带入ρ=xcosθ+ysinθ,求得每个θ对应的ρ值,并在ρ和θ所对应的单元,将累加器加1,即:Q(i,j)=Q(i,j)+1: 检验参数空间中每个累加器的值,累加器最大的单元所对应的ρ和θ即为直角坐标系中直线方程的参数. 3 接口 image:二值图像,canny边缘检测输出.这里是result. rho: 以像素为单位的距离精
-
python版opencv摄像头人脸实时检测方法
OpenCV版本3.3.0,注意模型文件的路径要改成自己所安装的opencv的模型文件的路径,路径不对就会报错,一般在opencv-3.3.0/data/haarcascades 路径下 import numpy as np import cv2 face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml') cap = cv2.VideoCapture(0) while True: ret,img = ca
-
python+mediapipe+opencv实现手部关键点检测功能(手势识别)
目录 一.mediapipe是什么? 二.使用步骤 1.引入库 2.主代码 3.识别结果 补充: 一.mediapipe是什么? mediapipe官网 二.使用步骤 1.引入库 代码如下: import cv2 from mediapipe import solutions import time 2.主代码 代码如下: cap = cv2.VideoCapture(0) mpHands = solutions.hands hands = mpHands.Hands() mpDraw = so
-
查看python下OpenCV版本的方法
在命令行输入以下代码: python import cv2 cv2.__version__ 以上这篇查看python下OpenCV版本的方法就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们.
-
Python下opencv库的安装过程及问题汇总
本文主要内容是python下opencv库的安装过程,涉及我在安装时遇到的问题,并且,将从网上搜集并试用的一些解决方案进行了简单的汇总,记录下来. 由于记录的是我第一次安装opencv库的过程,所以内容涵盖可能不全面,如果有出错的地方请务必指正.下面进入主题. 关于python的下载安装不再赘述,python的版本号是我们在opencv库的安装过程中需要用到的,cmd运行python可以进行查看. 通常,我们使用pip命令来安装扩展库. 打开cmd运行 pip install opencv-py
-
python基于Opencv实现人脸口罩检测
一.开发环境 python 3.6.6 opencv-python 4.5.1 二.设计要求 1.使用opencv-python对人脸口罩进行检测 三.设计原理 设计流程图如图3-1所示, 图3-1 口罩检测流程图 首先进行图片的读取,使用opencv的haar鼻子特征分类器,如果检测到鼻子,则证明没有戴口罩.如果检测到鼻子,接着使用opencv的haar眼睛特征分类器,如果没有检测到眼睛,则结束.如果检测到眼睛,则把RGB颜色空间转为HSV颜色空间.进行口罩区域的检测.口罩区域检测流程是首先把
-
python调用opencv实现猫脸检测功能
Python 小猫检测,通过调用opencv自带的猫脸检测的分类器进行检测. 分类器有两个:haarcascade_frontalcatface.xml和 haarcascade_frontalcatface_extended.xml.可以在opencv的安装目录下找到 D:\Program Files\OPENCV320\opencv\sources\data\haarcascades 小猫检测代码为: 1. 直接读取图片调用 import cv2 image = cv2.imread("ca
-
python进行OpenCV实战之画图(直线、矩形、圆形)
前言 在上一节我们通过使用NumPy的数组分割成功的在我们的图像上画了一个绿色的方块,但是如果我们想画一个单一的线条或者圆圈该怎么办呢?NumPy没有提供相关的功能,但是OpenCV提供了相关的函数,在本节就将为大家介绍三个基本的OpenCV画图方法: cv2.line() #1 cv2.rectangle() #2 cv2.circle() #3 1 画直线和矩形 在开始我们用OpenCV画我们的杰作之前,我们需要定义一个画布 import numpy as np #1 import cv2
-
Python下opencv图像阈值处理的使用笔记
图像的阈值处理一般使得图像的像素值更单一.图像更简单.阈值可以分为全局性质的阈值,也可以分为局部性质的阈值,可以是单阈值的也可以是多阈值的.当然阈值越多是越复杂的.下面将介绍opencv下的三种阈值方法. (一)简单阈值 简单阈值当然是最简单,选取一个全局阈值,然后就把整幅图像分成了非黑即白的二值图像了.函数为cv2.threshold() 这个函数有四个参数,第一个原图像,第二个进行分类的阈值,第三个是高于(低于)阈值时赋予的新值,第四个是一个方法选择参数,常用的有: cv2.THRESH_B