python实现PID算法及测试的例子
PID算法实现
import time
class PID:
def __init__(self, P=0.2, I=0.0, D=0.0):
self.Kp = P
self.Ki = I
self.Kd = D
self.sample_time = 0.00
self.current_time = time.time()
self.last_time = self.current_time
self.clear()
def clear(self):
self.SetPoint = 0.0
self.PTerm = 0.0
self.ITerm = 0.0
self.DTerm = 0.0
self.last_error = 0.0
self.int_error = 0.0
self.windup_guard = 20.0
self.output = 0.0
def update(self, feedback_value):
error = self.SetPoint - feedback_value
self.current_time = time.time()
delta_time = self.current_time - self.last_time
delta_error = error - self.last_error
if (delta_time >= self.sample_time):
self.PTerm = self.Kp * error#比例
self.ITerm += error * delta_time#积分
if (self.ITerm < -self.windup_guard):
self.ITerm = -self.windup_guard
elif (self.ITerm > self.windup_guard):
self.ITerm = self.windup_guard
self.DTerm = 0.0
if delta_time > 0:
self.DTerm = delta_error / delta_time
self.last_time = self.current_time
self.last_error = error
self.output = self.PTerm + (self.Ki * self.ITerm) + (self.Kd * self.DTerm)
def setKp(self, proportional_gain):
self.Kp = proportional_gain
def setKi(self, integral_gain):
self.Ki = integral_gain
def setKd(self, derivative_gain):
self.Kd = derivative_gain
def setWindup(self, windup):
self.windup_guard = windup
def setSampleTime(self, sample_time):
self.sample_time = sample_time
测试PID算法
import PID
import time
import matplotlib
matplotlib.use("TkAgg")
import matplotlib.pyplot as plt
import numpy as np
from scipy.interpolate import spline
#这个程序的实质就是在前九秒保持零输出,在后面的操作中在传递函数为某某的系统中输出1
def test_pid(P = 0.2, I = 0.0, D= 0.0, L=100):
"""Self-test PID class
.. note::
...
for i in range(1, END):
pid.update(feedback)
output = pid.output
if pid.SetPoint > 0:
feedback += (output - (1/i))
if i>9:
pid.SetPoint = 1
time.sleep(0.02)
---
"""
pid = PID.PID(P, I, D)
pid.SetPoint=0.0
pid.setSampleTime(0.01)
END = L
feedback = 0
feedback_list = []
time_list = []
setpoint_list = []
for i in range(1, END):
pid.update(feedback)
output = pid.output
if pid.SetPoint > 0:
feedback +=output# (output - (1/i))控制系统的函数
if i>9:
pid.SetPoint = 1
time.sleep(0.01)
feedback_list.append(feedback)
setpoint_list.append(pid.SetPoint)
time_list.append(i)
time_sm = np.array(time_list)
time_smooth = np.linspace(time_sm.min(), time_sm.max(), 300)
feedback_smooth = spline(time_list, feedback_list, time_smooth)
plt.figure(0)
plt.plot(time_smooth, feedback_smooth)
plt.plot(time_list, setpoint_list)
plt.xlim((0, L))
plt.ylim((min(feedback_list)-0.5, max(feedback_list)+0.5))
plt.xlabel('time (s)')
plt.ylabel('PID (PV)')
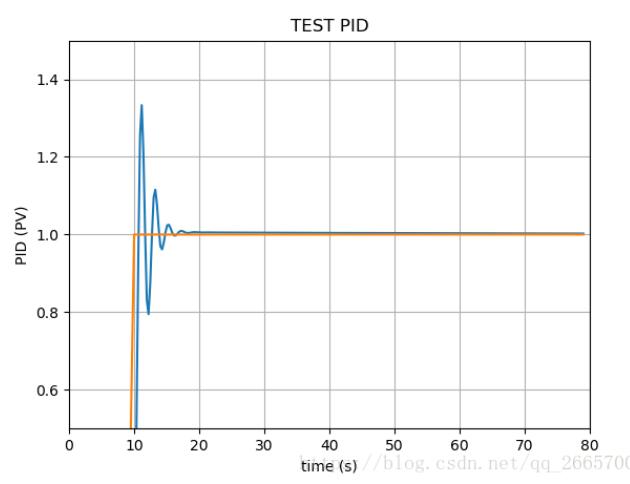
plt.title('TEST PID')
plt.ylim((1-0.5, 1+0.5))
plt.grid(True)
plt.show()
if __name__ == "__main__":
test_pid(1.2, 1, 0.001, L=80)
# test_pid(0.8, L=50)
结果
以上这篇python实现PID算法及测试的例子就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
以Python的Pyspider为例剖析搜索引擎的网络爬虫实现方法
在这篇文章中,我们将分析一个网络爬虫. 网络爬虫是一个扫描网络内容并记录其有用信息的工具.它能打开一大堆网页,分析每个页面的内容以便寻找所有感兴趣的数据,并将这些数据存储在一个数据库中,然后对其他网页进行同样的操作. 如果爬虫正在分析的网页中有一些链接,那么爬虫将会根据这些链接分析更多的页面. 搜索引擎就是基于这样的原理实现的. 这篇文章中,我特别选了一个稳定的."年轻"的开源项目pyspider,它是由 binux 编码实现的. 注:据认为pyspider持续监控网络,它假定网页在一
-
Python获取系统所有进程PID及进程名称的方法示例
本文实例讲述了Python获取系统所有进程PID及进程名称的方法.分享给大家供大家参考,具体如下: psutil模块中提供了进程管理方法,引用其中的几个方法就能够获得进程的相关信息.简单写个小脚本测试一下,顺便看看本机Windows7系统中到底运行着多少个进程,进程都是什么. 代码: # -*- coding: utf-8 -*- #! python2 #!/usr/bin/python import psutil pids = psutil.pids() for pid in pids: p
-
python 根据pid杀死相应进程的方法
用python语言实现根据pid杀死相应进程 kill_process.py代码如下 #! /usr/bin/python # -*- coding: utf-8 -*- import os import sys import signal def kill(pid): try: a = os.kill(pid, signal.SIGKILL) # a = os.kill(pid, signal.9) # 与上等效 print '已杀死pid为%s的进程, 返回值是:%s' % (pid, a)
-
python爬虫框架talonspider简单介绍
1.为什么写这个? 一些简单的页面,无需用比较大的框架来进行爬取,自己纯手写又比较麻烦 因此针对这个需求写了talonspider: •1.针对单页面的item提取 - 具体介绍点这里 •2.spider模块 - 具体介绍点这里 2.介绍&&使用 2.1.item 这个模块是可以独立使用的,对于一些请求比较简单的网站(比如只需要get请求),单单只用这个模块就可以快速地编写出你想要的爬虫,比如(以下使用python3,python2见examples目录): 2.1.1.单页面单目标 比如
-
用python记录运行pid,并在需要时kill掉它们的实例
我在跑爬虫程序的时候,由于爬虫程序的等待目标服务器返回数据的时间很长,而cpu占用很低,所以经常挂着代理一跑就跑好几百个.但是爬虫程序通常是写了死循环,或直到分配给该进程的任务都跑完才退出的.如果我们想中途结束掉这些任务,是没办法手工一个一个kill掉的.那么该如何结束这些进程呢? 我的方法就是在运行爬虫进程时,记录该进程的Pid,然后在需要手动结束时,再用语句kill掉它们. for i in {1..100} do nohup python NetEase_comms_proxy.py >
-
python使用标准库根据进程名如何获取进程的pid详解
前言 标准库是Python的一个组成部分.这些标准库是Python为你准备好的利器,可以让编程事半功倍.特别是有时候需要获取进程的pid,但又无法使用第三方库的时候.下面话不多说了,来一起看看详细的介绍吧. 方法适用linux平台. 方法1 使用subprocess 的check_output函数执行pidof命令 from subprocess import check_output def get_pid(name): return map(int,check_output(["pidof&
-
使用python 获取进程pid号的方法
保存为.py文件后 运行脚本在后面添加进程名称即可 比如:python proinfo.py qq 即可获取QQ的进程信息,注意不区分大小写 复制代码 代码如下: #-*- encoding:UTF-8 -*-import osimport sysimport string import psutilimport re def get_pid(name): process_list = psutil.get_process_list() regex = "pid=(\d+),\sname=\'&
-
python实现PID算法及测试的例子
PID算法实现 import time class PID: def __init__(self, P=0.2, I=0.0, D=0.0): self.Kp = P self.Ki = I self.Kd = D self.sample_time = 0.00 self.current_time = time.time() self.last_time = self.current_time self.clear() def clear(self): self.SetPoint = 0.0 s
-

Python基于聚类算法实现密度聚类(DBSCAN)计算【测试可用】
本文实例讲述了Python基于聚类算法实现密度聚类(DBSCAN)计算.分享给大家供大家参考,具体如下: 算法思想 基于密度的聚类算法从样本密度的角度考察样本之间的可连接性,并基于可连接样本不断扩展聚类簇得到最终结果. 几个必要概念: ε-邻域:对于样本集中的xj, 它的ε-邻域为样本集中与它距离小于ε的样本所构成的集合. 核心对象:若xj的ε-邻域中至少包含MinPts个样本,则xj为一个核心对象. 密度直达:若xj位于xi的ε-邻域中,且xi为核心对象,则xj由xi密度直达. 密度可达:若样
-
Python aiohttp百万并发极限测试实例分析
本文实例讲述了Python aiohttp百万并发极限测试.分享给大家供大家参考,具体如下: 本文将测试python aiohttp的极限,同时测试其性能表现,以分钟发起请求数作为指标.大家都知道,当应用到网络操作时,异步的代码表现更优秀,但是验证这个事情,同时搞明白异步到底有多大的优势以及为什么会有这样的优势仍然是一件有趣的事情.为了验证,我将发起1000000请求,用aiohttp客户端.aiohttp每分钟能够发起多少请求?你能预料到哪些异常情况以及崩溃会发生,当你用比较粗糙的脚本去发起如
-
python实现AES算法及AES-CFB8加解密源码
目录 Python实现AES算法 生成轮密钥 加密 解密 完整代码如下 测试 测试程序 Python实现AES-CFB8加解密 Python实现AES算法 密码学课程老师留的作业,我觉得用python实现更简单,就用python写了一个加解密的程序.程序分成三个部分,一个部分是生成轮密钥,一个加密,一个是解密. 生成轮密钥 这个部分要看是不是四的倍数,非四的倍数是简单的,直接异或就可以了.如果是4的倍数,这时就需要执行字节代替和异或运算. for i in range(4):#把16进制转成十进
-
python快速查找算法应用实例
本文实例讲述了Python快速查找算法的应用,分享给大家供大家参考. 具体实现方法如下: import random def partition(list_object,start,end): random_choice = start #random.choice(range(start,end+1)) #把这里的start改成random()效率会更高些 x = list_object[random_choice] i = start j = end while True: while li
-
python二分查找算法的递归实现方法
本文实例讲述了python二分查找算法的递归实现方法.分享给大家供大家参考,具体如下: 这里先提供一段二分查找的代码: def binarySearch(alist, item): first = 0 last = len(alist)-1 found = False while first<=last and not found: midpoint = (first + last)//2 if alist[midpoint] == item: found = True else: if ite
-
Python数据结构与算法之二叉树结构定义与遍历方法详解
本文实例讲述了Python数据结构与算法之二叉树结构定义与遍历方法.分享给大家供大家参考,具体如下: 先序遍历,中序遍历,后序遍历 ,区别在于三条核心语句的位置 层序遍历 采用队列的遍历操作第一次访问根,在访问根的左孩子,接着访问根的有孩子,然后下一层 自左向右一一访问同层的结点 # 先序遍历 # 访问结点,遍历左子树,如果左子树为空,则遍历右子树, # 如果右子树为空,则向上走到一个可以向右走的结点,继续该过程 preorder(t): if t: print t.value preorde
-
Python数据结构与算法之图的基本实现及迭代器实例详解
本文实例讲述了Python数据结构与算法之图的基本实现及迭代器.分享给大家供大家参考,具体如下: 这篇文章参考自<复杂性思考>一书的第二章,并给出这一章节里我的习题解答. (这书不到120页纸,要卖50块!!,一开始以为很厚的样子,拿回来一看,尼玛.....代码很少,给点提示,然后让读者自己思考怎么实现) 先定义顶点和边 class Vertex(object): def __init__(self, label=''): self.label = label def __repr__(sel
-
使用python实现knn算法
本文实例为大家分享了python实现knn算法的具体代码,供大家参考,具体内容如下 knn算法描述 对需要分类的点依次执行以下操作: 1.计算已知类别数据集中每个点与该点之间的距离 2.按照距离递增顺序排序 3.选取与该点距离最近的k个点 4.确定前k个点所在类别出现的频率 5.返回前k个点出现频率最高的类别作为该点的预测分类 knn算法实现 数据处理 #从文件中读取数据,返回的数据和分类均为二维数组 def loadDataSet(filename): dataSet = [] labels
-
Python数据结构与算法之使用队列解决小猫钓鱼问题
本文实例讲述了Python数据结构与算法之使用队列解决小猫钓鱼问题.分享给大家供大家参考,具体如下: 按照<啊哈>里的思路实现这道题目,但是和结果不一样,我自己用一幅牌试了一下,发现是我的结果像一点,可能我理解的有偏差. # 小猫钓鱼 # 计算桌上每种牌的数量 # 使用defaultdict类,并设置默认类型为int型,即默认值为0 # cardcounts = defaultdict(int) # 不过deque有对应的方法 def henhenhaahaa(): from collecti