Python OpenCV Canny边缘检测算法的原理实现详解
目录
- Gaussian smoothing
- Computing the gradient magnitude and orientation
- Non-maxima suppression
- Hysteresis thresholding
- OpenCV实现
Gaussian smoothing
总的来说,Canny边缘检测可以分为四个步骤:
由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声。
具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理。
Computing the gradient magnitude and orientation
对平滑后的图像,在水平、垂直两个方向上使用Sobel算子(如下图)计算梯度大小,得到两个方向上的一阶导数Gx与Gy。
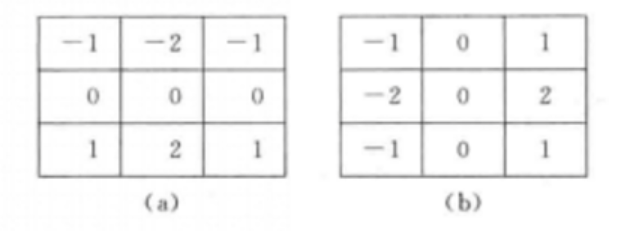
在得到两个方向上的梯度之后,对这两个向量求和,得到这一点处的梯度大小与方向。
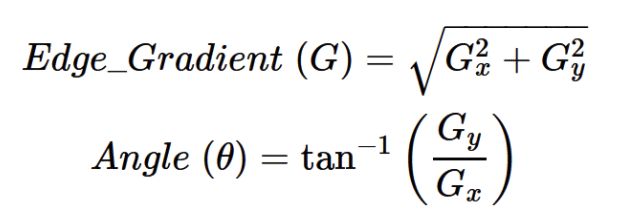
采用四舍五入,将梯度方向确定为上下左右与四个对角线方向之一(45°的倍数)。
Non-maxima suppression
在得到梯度大小与方向之后,对图像进一步扫描,去除不构成边缘的不重要的像素信息,这里采用的方法是非极大值抑制——在每个像素处,检查像素是否在其梯度方向的邻域中是局部最大值,只保留局部最大值的梯度。
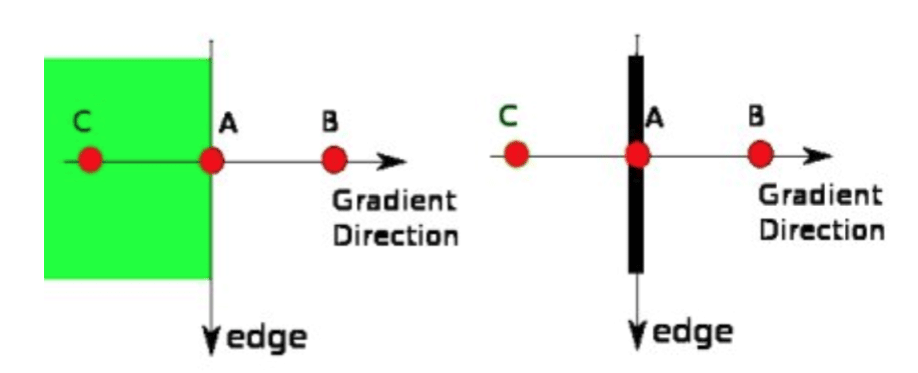
在上图中,点A位于边缘上。梯度方向与边缘方向垂直。为了确定要不要保留A点作为边缘,需要将A点处的梯度大小与B、C两点的梯度大小比较,如果A点的梯度大小不是局部最大,则将该点抑制。
因此,从结果上讲,NMS其实是将B、C两点抑制了,它们不会出现在结果中,因此这一步的效果是“thin edges”。
Hysteresis thresholding
定义上界与下界两个阈值,并规定:
- 任何梯度强度大于上界的像素都是边;
- 任何梯度强度小于下界的像素都不是边;
- 任何梯度介于两个阈值之间的可能是边,此时考察它们的连通性,如果它们和第一种情况(确定是边缘的像素)相连接,就认为它们是边缘,否则认为它们不是边缘。
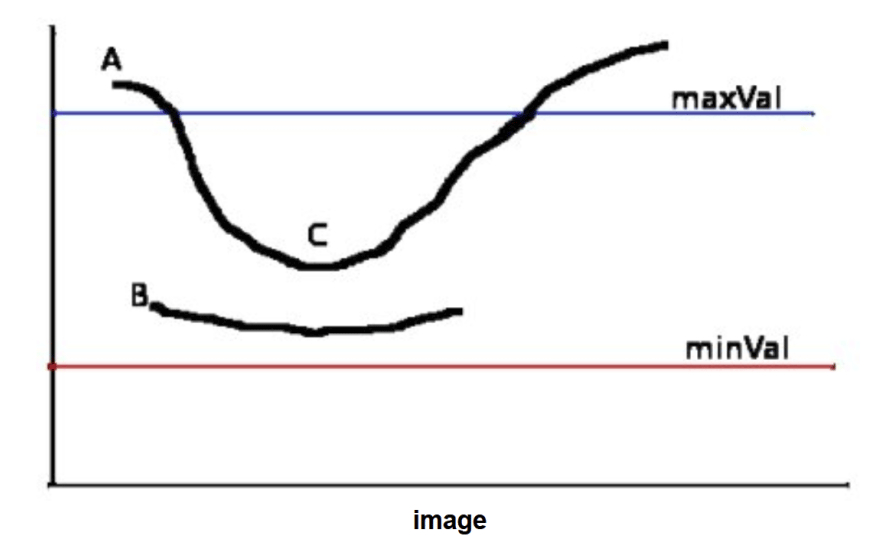
在上图中,A点在maxVal阈值之上,确定是边缘。C介于两个阈值之间,但与A相连,因此它也是边缘。B介于两个阈值之间,它所在的曲线上并没有任何像素点的梯度强度在maxVal之上,因此它不是边缘。
需要指出的是,上面四步操作之后得到的是strong edges。
OpenCV实现
OpenCV提供了cv.Canny()方法,该方法将输入的原始图像转换为边缘图像。
该方法的原型为:
cv.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]]) -> edges cv.Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges
image参数是array格式的输入图像。threshold1与threshold2分别是我们的下界阈值与上界阈值。apertureSize是用于查找图像梯度的Sobel核的大小,默认为3。L2gradient指定了求梯度幅值的公式,是一个布尔型变量,默认为False。当它为True时,使用L2,否则使用L1。
下面是具体代码:
def canny_detect(image_path, show=True):
# 读取图像
image = cv2.imread(image_path, 0)
# 获取结果
edges = cv2.Canny(image, 100, 200)
if show:
# 绘制原图
plt.subplot(121)
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.xticks([])
plt.yticks([])
# 绘制边缘图
plt.subplot(122)
plt.imshow(edges, cmap='gray')
plt.title('Edge Image')
plt.xticks([])
plt.yticks([])
plt.show()
return edges
canny_detect('images/2.jpeg')
效果:
到此这篇关于Python OpenCV Canny边缘检测算法的原理实现详解的文章就介绍到这了,更多相关Python OpenCV Canny边缘检测 内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
使用OpenCV-python3实现滑动条更新图像的Canny边缘检测功能
import cv2 from matplotlib import pyplot as plt import numpy as np img= cv2.imread('39.jpg')#加载图片 cv2.namedWindow('Canny edge detect')#设置窗口,cv2.WINDOW_NORMAL表示窗口大小可自动调节 cv2.namedWindow('Original Image',cv2.WINDOW_NORMAL) cv2.namedWindow('Canny edgeIm
-
opencv python Canny边缘提取实现过程解析
这篇文章主要介绍了opencv python Canny边缘提取实现过程解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 Canny是边缘提取算法,在1986年提出的是一个很好的边缘检测器Canny算法介绍 非最大信号抑制: 高低阈值连接: example import cv2 as cv import numpy as np # canny运算步骤:5步 # 1. 高斯模糊 - GaussianBlur # 2. 灰度转换 - cvtCol
-

Python实现Opencv cv2.Canny()边缘检测
目录 1. 效果图 2. 源码 补充:OpenCV-Python 中 Canny() 参数 这篇博客将介绍Canny边缘检测的概念,并利用cv2.Canny()实现边缘检测: Canny边缘检测是一种流行的边缘检测算法.它是由约翰F开发的,是一个多阶段的算法: Canny边缘检测大致包含4个步骤: 降噪(使用高斯滤波去除高频噪声): 计算边缘梯度和方向(SobelX.SobleY核在水平方向和垂直方向对平滑后的图像进行滤波,找到每个像素的边缘梯度和方向): 非最大抑制(在得到梯度大小和方向后,对
-
python中opencv Canny边缘检测
目录 Canny边缘检测 Canny边缘检测基础 高斯滤波去除图像噪声 计算梯度 非极大值抑制 应用双阈值确定边缘 Canny函数及使用 Canny边缘检测 Canny边缘检测是一种使用多级边缘检测算法检测边缘的方法. OpenCV提供了函数cv2.Canny()实现Canny边缘检测. Canny边缘检测基础 Canny边缘检测分为如下几个步骤: 去噪.噪声会影响边缘检测的准确性,因此首先要将噪声过滤掉. 计算梯度的幅度与方向 非极大值抑制,即适当地让边缘“变瘦” 确定边缘.使用双阈值算法确定
-
Python OpenCV Canny边缘检测算法的原理实现详解
目录 Gaussian smoothing Computing the gradient magnitude and orientation Non-maxima suppression Hysteresis thresholding OpenCV实现 Gaussian smoothing 总的来说,Canny边缘检测可以分为四个步骤: 由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声.具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理. Computing the gra
-
opencv canny边缘检测算法详解
目录 一.边缘检测原理 二.canny算法原理 三.opencv函数支持Canny() 四.代码示例: 一.边缘检测原理 图像的边缘由图像中两个相邻的区域之间的像素集合组成,是指图像中一个区域的结束和另外一个区域的开始.也可以这么理解,图像边缘就是图像中灰度值发生空间突变的像素的集合.梯度方向和幅度是图像边缘的两个性质,沿着跟边缘垂直的的方向,像素值的变化幅度比较平缓:而沿着与边缘平行的方向,则像素值变化幅度变化比较大.于是,根据该变化特性,通常会采用计算一阶或者二阶导数的方法来描述和检测图像边
-
Python+Opencv实现物体尺寸测量的方法详解
目录 1.效果展示 2.项目介绍 3.项目搭建 4.utils.py文件代码展示与讲解 5.项目代码展示与讲解 6.项目资源 7.项目总结 1.效果展示 我们将以两种方式来展示我们这个项目的效果. 下面这是视频的实时检测,我分别用了盒子和盖子来检测,按理来说效果不应该怎么差的,但我实在没有找到合适的背景与物体.且我的摄像头使用的是外设,我不得不手持,所以存在一点点的抖动,但我可以保证,它是缺少了适合检测物体与背景. 我使用手机拍了一张照片并经过了ps修改了背景,效果不错. 2.项目介绍 本项目中
-
对Python+opencv将图片生成视频的实例详解
如下所示: import cv2 fps = 16 size = (width,height) videowriter = cv2.VideoWriter("a.avi",cv2.VideoWriter_fourcc('M','J','P','G'),fps,size) for i in range(1,200): img = cv2.imread('%d'.jpg % i) videowriter.write(img) 以上这篇对Python+opencv将图片生成视频的实例详解就是
-
Python+OpenCV实现信用卡数字识别的方法详解
目录 一.模板图像处理 二.信用卡图片预处理 一.模板图像处理 (1)灰度图.二值图转化 template = cv2.imread('C:/Users/bwy/Desktop/number.png') template_gray = cv2.cvtColor(template, cv2.COLOR_BGR2GRAY) cv_show('template_gray', template_gray) # 形成二值图像,因为要做轮廓检测 ret, template_thresh = cv2.thre
-
Python排序搜索基本算法之堆排序实例详解
本文实例讲述了Python排序搜索基本算法之堆排序.分享给大家供大家参考,具体如下: 堆是一种完全二叉树,堆排序是一种树形选择排序,利用了大顶堆堆顶元素最大的特点,不断取出最大元素,并调整使剩下的元素还是大顶堆,依次取出最大元素就是排好序的列表.举例如下,把序列[26,5,77,1,61,11,59,15,48,19]排序,如下: 基于堆的优先队列算法代码如下: def fixUp(a): #在堆尾加入新元素,fixUp恢复堆的条件 k=len(a)-1 while k>1 and a[k//2
-
Python+OpenCV图片局部区域像素值处理详解
背景故事:我需要对一张图片做一些处理,是在图像像素级别上的数值处理,以此来反映图片中特定区域的图像特征,网上查了很多,大多关于opencv的应用教程帖子基本是停留在打开图片,提取像素重新写入图片啊之类的基本操作,我是要取图片中的特定区域再提取它的像素值,作为一个初学者开始接触opencv简直一脸懵,慢慢摸索着知道了opencv的一些函数是可以实现的像SetImageROI()函数设置ROI区域,即感兴趣区域,就很好用啊,总之最后是实现了自己想要的功能.现在看个程序确实是有点挫,也有好多多余的没必
-
python实现canny边缘检测
canny边缘检测原理 canny边缘检测共有5部分组成,下边我会分别来介绍. 1 高斯模糊(略) 2 计算梯度幅值和方向. 可选用的模板:soble算子.Prewitt算子.Roberts模板等等; 一般采用soble算子,OpenCV也是如此,利用soble水平和垂直算子与输入图像卷积计算dx.dy: 进一步可以得到图像梯度的幅值: 为了简化计算,幅值也可以作如下近似: 角度为: 如下图表示了中心点的梯度向量.方位角以及边缘方向(任一点的边缘与梯度向量正交) : θ = θm = arcta
-
Python OpenCV实现边缘检测
本文实例为大家分享了Python OpenCV实现边缘检测的具体代码,供大家参考,具体内容如下 1. Sobel 算子检测 Sobel 算子是高斯平滑和微分运算的组合,抗噪能力很强,用途也很多,尤其是效率要求高但对细纹理不是很在意的时候. 对于不连续的函数,有: 假设要处理的图像为I,在两个方向求导. 水平变化:用奇数大小的模板对图像I卷积,结果为Gx.例如,当模板大小为3时,Gx为: 垂直变化:用奇数大小的模板对图像I卷积,结果为Gy.例如,当模板大小为3时,Gy为: 在图像的每个点,结合以上