python中的opencv 图像分割与提取
目录
- 图像分割与提取
- 用分水岭算法实现图像分割与提取
- 算法原理
- 相关函数介绍
- 分水岭算法图像分割实例
- 交互式前景提取
图像分割与提取
图像中将前景对象作为目标图像分割或者提取出来。对背景本身并无兴趣分水岭算法及GrabCut算法对图像进行分割及提取。
用分水岭算法实现图像分割与提取
分水岭算法将图像形象地比喻为地理学上的地形表面,实现图像分割,该算法非常有效。
算法原理
任何一幅灰度图像,都可以被看作是地理学上的地形表面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷。
左图是原始图像,右图是其对应的“地形表面”。
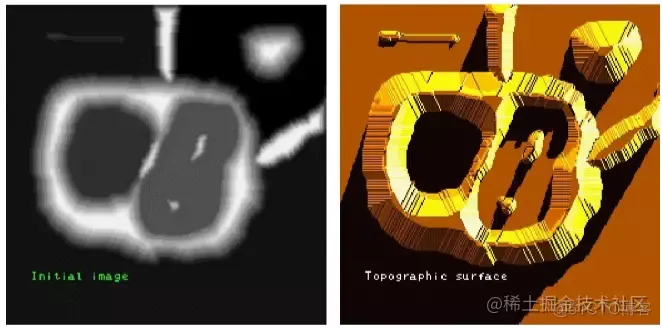
该过程将图像分成两个不同的集合:集水盆地和分水岭线。我们构建的堤坝就是分水岭线,也即对原始图像的分割。这就是分水岭算法。

由于噪声等因素的影响,采用上述基础分水岭算法经常会得到过度分割的结果。过度分割会将图像划分为一个个稠密的独立小块,让分割失去了意义。为了改善图像分割效果,人们提出了基于掩模的改进的分水岭算法。改进的分水岭算法允许用户将他认为是同一个分割区域的部分标注出来(被标注的部分就称为掩模)。分水岭算法在处理时,就会将标注的部分处理为同一个分割区域。
例如:
原始图像,对其做标注处理,其中被标注为深色的三个小色块表示,在使用掩模分水岭算法时,这些部分所包含的颜色都会被分割在同一个区域内。

相关函数介绍
在OpenCV中,可以使用函数cv2.watershed()实现分水岭算法。
在具体的实现过程中,还需要借助于形态学函数、距离变换函数cv2.distanceTransform()、cv2.connectedComponents()来完成图像分割。
- 形态学函数
在使用分水岭算法对图像进行分割前,需要对图像进行简单的形态学处理。
- 开运算
开运算是先腐蚀、后膨胀的操作,开运算能够去除图像内的噪声
在用分水岭算法处理图像前,要先使用开运算去除图像内的噪声,以避免噪声对图像分割可能造成的干扰。 - 获取图像边界
通过形态学操作和减法运算能够获取图像的边界。
使用形态学变换,获取一幅图像的边界信息
import cv2
import numpy as np
import matplotlib.pyplot as plt
o=cv2.imread("my.bmp", cv2.IMREAD_UNCHANGED)
k=np.ones((5,5), np.uint8)
e=cv2.erode(o, k)
b=cv2.subtract(o, e)
plt.subplot(131)
plt.imshow(o)
plt.axis('off')
plt.subplot(132)
plt.imshow(e)
plt.axis('off')
plt.subplot(133)
plt.imshow(b)
plt.axis('off')
plt.show()
使用形态学操作和减法运算能够获取图像的边界信息。但是,形态学操作仅适用于比较简单的图像。如果图像内的前景对象存在连接的情况,使用形态学操作就无法准确获取各个子图像的边界了。
- 距离变换函数distanceTransform
当图像内的各个子图没有连接时,可以直接使用形态学的腐蚀操作确定前景对象,但是如果图像内的子图连接在一起时,就很难确定前景对象了
此时,借助于距离变换函数cv2.distanceTransform()可以方便地将前景对象提取出来。
函数cv2.distanceTransform()计算二值图像内任意点到最近背景点的距离。
一般情况下,该函数计算的是图像内非零值像素点到最近的零值像素点的距离,即计算二值图像中所有像素点距离其最近的值为0的像素点的距离。
如果像素点本身的值为0,则这个距离也为0。
- cv2.distanceTransform()的计算结果反映了各个像素与背景(值为0的像素点)的距离关系。
通常情况下:
- 如果前景对象的中心(质心)距离值为0的像素点距离较远,会得到一个较大的值。
- 如果前景对象的边缘距离值为0的像素点较近,会得到一个较小的值。
如果对上述计算结果进行阈值化,就可以得到图像内子图的中心、骨架等信息。距离变换函数cv2.distanceTransform()可以用于计算对象的中心,还能细化轮廓、获取图像前景等
函数cv2.distanceTransform()的语法格式为:
dst=cv2.distanceTransform(src, distanceType, maskSize[, dstType]])
- src是8位单通道的二值图像。
- distanceType为距离类型参数

- maskSize为掩模的尺寸
distanceType=cv2.DIST_L1或cv2.DIST_C时,maskSize强制为3(因为设置为3和设置为5及更大值没有什么区别)。

- dstType为目标图像的类型,默认值为CV_32F。
- dst表示计算得到的目标图像,可以是8位或32位浮点数,尺寸和src相同。
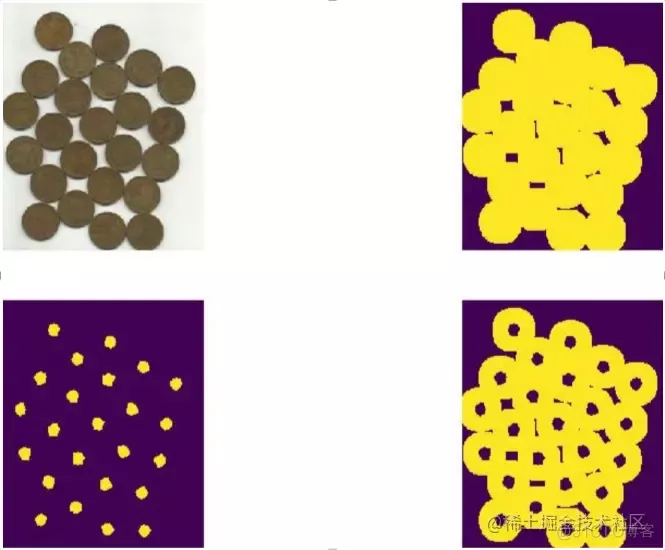
使用距离变换函数cv2.distanceTransform(),计算一幅图像的确定前景
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ishow=img.copy()
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2) # 进行开运算
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5)
ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0)
plt.subplot(131)
plt.imshow(ishow)
plt.axis('off')
plt.subplot(132)
plt.imshow(dist_transform)
plt.axis('off')
plt.subplot(133)
plt.imshow(fore)
plt.axis('off')
plt.show()
fore图像中: 比较准确地显示出左图内的“确定前景”。确定前景,通常是指前景对象的中心。之所以认为这些点是确定前景,是因为它们距离背景点的距离足够远,都是距离大于足够大的固定阈值(0.7*dist_transform.max())的点。
- 确定未知区域
使用形态学的膨胀操作能够将图像内的前景“膨胀放大”。
当图像内的前景被放大后,背景就会被“压缩”,所以此时得到的背景信息一定小于实际背景的,不包含前景的“确定背景”。
为了方便说明将确定背景称为B。
- 距离变换函数cv2.distanceTransform()能够获取图像的“中心”,得到“确定前景”。
图像中有了确定前景F和确定背景B,剩下区域的就是未知区域UN了。这部分区域正是分水岭算法要进一步明确的区域。
针对一幅图像O,通过以下关系能够得到未知区域UN: - 未知区域UN=图像O-确定背景B-确定前景F
- 未知区域UN=(图像O-确定背景B)- 确定前景F
“图像O-确定背景B”,可以通过对图像进行形态学的膨胀操作得到。
标注一幅图像的确定前景、确定背景及未知区域。
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ishow=img.copy()
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2)
bg = cv2.dilate(opening, kernel, iterations=3)
dist = cv2.distanceTransform(opening, cv2.DIST_L2,5)
ret, fore = cv2.threshold(dist,0.7*dist.max(),255,0)
fore = np.uint8(fore)
un = cv2.subtract(bg, fore)
plt.subplot(221)
plt.imshow(ishow)
plt.axis('off')
plt.subplot(222)
plt.imshow(bg)
plt.axis('off')
plt.subplot(223)
plt.imshow(fore)
plt.axis('off')
plt.subplot(224)
plt.imshow(un)
plt.axis('off')
plt.show()
- 函数connectedComponents
明确了确定前景后,就可以对确定前景图像进行标注了。
在OpenCV中,可以使用函数cv2.connectedComponents()进行标注。该函数会将背景标注为0,将其他的对象使用从1开始的正整数标注。
函数cv2.connectedComponents()的语法格式为:
retval, labels = cv2.connectedComponents( image )
- image为8位单通道的待标注图像。
- retval为返回的标注的数量。
- labels为标注的结果图像。
使用函数cv2.connectedComponents()标注一幅图像
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ishow=img.copy()
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2)
sure_bg = cv2.dilate(opening, kernel, iterations=3)
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5)
ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0)
fore = np.uint8(fore)
ret, markers = cv2.connectedComponents(fore)
print(ret)
plt.subplot(131)
plt.imshow(ishow)
plt.axis('off')
plt.subplot(132)
plt.imshow(fore)
plt.axis('off')
plt.subplot(133)
plt.imshow(markers)
plt.axis('off')
plt.show()
前景图像的中心点被做了不同的标注(用不同颜色区分)
函数cv2.connectedComponents()在标注图像时,会将背景标注为0,将其他的对象用从1开始的正整数标注。具体的对应关系为:
- 数值0代表背景区域。
- 从数值1开始的值,代表不同的前景区域。
在分水岭算法中,标注值0代表未知区域。所以,我们要对函数cv2.connectedComponents()标注的结果进行调整:将标注的结果都加上数值1。经过上述处理后,在标注结果中:
- 数值1代表背景区域。
- 从数值2开始的值,代表不同的前景区域。
为了能够使用分水岭算法,还需要对原始图像内的未知区域进行标注,将已经计算出来的未知区域标注为0即可。
关键代码:
ret, markers = cv2.connectedComponents(fore) markers = markers+1 markers[未知区域] = 0
使用函数cv2.connectedComponents()标注一幅图像,并对其进行修正,使未知区域被标注为0
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ishow=img.copy()
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2)
sure_bg = cv2.dilate(opening, kernel, iterations=3)
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5)
ret, fore = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0)
fore = np.uint8(fore)
ret, markers1 = cv2.connectedComponents(fore)
foreAdv=fore.copy()
unknown = cv2.subtract(sure_bg, foreAdv)
ret, markers2 = cv2.connectedComponents(foreAdv)
markers2 = markers2+1
markers2[unknown==255] = 0
plt.subplot(121)
plt.imshow(markers1)
plt.axis('off')
plt.subplot(122)
plt.imshow(markers2)
plt.axis('off')
plt.show()
前景都有一个黑色的边缘,这个边缘是被标注的未知区域。
- 函数cv2.watershed()
完成上述处理后,就可以使用分水岭算法对预处理结果图像进行分割了。
在OpenCV中,实现分水岭算法的函数是cv2.watershed(),其语法格式为:
markers = cv2.watershed( image, markers )
- image是输入图像,必须是8位三通道的图像。在对图像使用
cv2.watershed()函数处理之前,必须先用正数大致勾画出图像中的期望分割区域。每一个分割的区域会被标注为1、2、3等。对于尚未确定的区域,需要将它们标注为0。我们可以将标注区域理解为进行分水岭算法分割的“种子”区域。
- markers是32位单通道的标注结果,它应该和image具有相等大小。在markers中,每一个像素要么被设置为初期的“种子值”,要么被设置为**“-1”表示边界**。
分水岭算法图像分割实例
使用分水岭算法进行图像分割时,基本的步骤为:
- 通过形态学开运算对原始图像O去噪。
- 通过腐蚀操作获取“确定背景B”。
需要注意,这里得到“原始图像-确定背景”即可。 - 利用距离变换函数cv2.distanceTransform()对原始图像进行运算,并对其进行阈值处理,得到“确定前景F”。
- 计算未知区域UN(UN=O -B - F)
- 利用函数cv2.connectedComponents()对原始图像O进行标注。
- 对函数cv2.connectedComponents()的标注结果进行修正。
- 使用分水岭函数完成对图像的分割。
使用分水岭算法对一幅图像进行分割:
import numpy as np
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('water_coins.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
img=cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
ishow=img.copy()
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
kernel = np.ones((3,3), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations = 2)
sure_bg = cv2.dilate(opening, kernel, iterations=3)
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2,5)
ret, sure_fg = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0)
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg, sure_fg)
ret, markers = cv2.connectedComponents(sure_fg)
markers = markers+1
markers[unknown==255] = 0
markers = cv2.watershed(img, markers)
img[markers == -1] = [0,255,0] # 边界
plt.subplot(121)
plt.imshow(ishow)
plt.axis('off')
plt.subplot(122)
plt.imshow(img)
plt.axis('off')
plt.show()
交互式前景提取
经典的前景提取技术主要使用纹理(颜色)信息,如魔术棒工具,或根据边缘(对比度)信息,如智能剪刀等。在开始提取前景时,先用一个矩形框指定前景区域所在的大致位置范围,然后不断迭代地分割,直到达到最好的效果。经过上述处理后,提取前景的效果可能并不理想,存在前景没有提取出来,或者将背景提取为前景的情况,此时需要用户干预提取过程。
用户在原始图像的副本中(也可以是与原始图像大小相等的任意一幅图像),用白色标注要提取为前景的区域,用黑色标注要作为背景的区域。然后,将标注后的图像作为掩模,让算法继续迭代提取前景从而得到最终结果。

PowerPoint 2016提供了“删除背景”功能。
GrabCut算法的具体实施过程。
- 将前景所在的大致位置使用矩形框标注出来。
- 此时矩形框框出的仅仅是前景的大致位置,其中既包含前景又包含背景,所以该区域实际上是未确定区域。但是,该区域以外的区域被认为是“确定背景”。
- 根据矩形框外部的“确定背景”数据来区分矩形框区域内的前景和背景。
- 用高斯混合模型(Gaussians Mixture Model, GMM)对前景和背景建模。
- GMM会根据用户的输入 学习并创建新的像素分布。对未分类的像素(可能是背景也可能是前景),根据其与已知分类像素(前景和背景)的关系进行分类。
- 根据像素分布情况生成一幅图,图中的节点就是各个像素点。
- 除了像素点之外,还有两个节点:前景节点和背景节点。所有的前景像素都和前景节点相连,所有的背景像素都和背景节点相连。每个像素连接到前景节点或背景节点的边的权重由像素是前景或背景的概率来决定。
- 图中的每个像素除了与前景节点或背景节点相连外,彼此之间还存在着连接。两个像素连接的边的权重值由它们的相似性决定,两个像素的颜色越接近,边的权重值越大。
- 完成节点连接后,需要解决的问题变成了一幅连通的图。在该图上根据各自边的权重关系进行切割,将不同的点划分为前景节点和背景节点。
- 不断重复上述过程,直至分类收敛为止。
在OpenCV中,实现交互式前景提取的函数是cv2.grabCut(),其语法格式为:
mask, bgdModel, fgdModel =cv2.grabCut(img, mask, rect, bgdModel, fgdModel, iterCount[, mode] )
- img为输入图像,要求是8位3通道的。
- mask为掩模图像,要求是8位单通道的。该参数用于确定前景区域、背景区域和不确定区域,可以设置为4种形式。
- cv2.GC_BGD:表示确定背景,也可以用数值0表示。
- cv2.GC_FGD:表示确定前景,也可以用数值1表示。
- cv2.GC_PR_BGD:表示可能的背景,也可以用数值2表示。
- cv2.GC_PR_FGD:表示可能的前景,也可以用数值3表示。
在最后使用模板提取前景时,会将参数值0和2合并为背景(均当作0处理),将参数值1和3合并为前景(均当作1处理)。
在通常情况下,我们可以使用白色笔刷和黑色笔刷在掩模图像上做标记,再通过转换将其中的白色像素设置为0,黑色像素设置为1。
- rect指包含前景对象的区域,该区域外的部分被认为是“确定背景”。因此,在选取时务必确保让前景包含在rect指定的范围内;否则,rect外的前景部分是不会被提取出来的。
只有当参数mode的值被设置为矩形模式cv2.GC_INIT_WITH_RECT时,参数rect才有意义。
其格式为(x, y, w, h),分别表示区域左上角像素的x轴和y轴坐标以及区域的宽度和高度。
如果前景位于右下方,又不想判断原始图像的大小,对于w 和h可以直接用一个很大的值。
使用掩模模式时,将该值设置为none即可。
- bgdModel为算法内部使用的数组,只需要创建大小为(1, 65)的numpy.float64数组。
- fgdModel为算法内部使用的数组,只需要创建大小为(1, 65)的numpy.float64数组。
- iterCount表示迭代的次数。
mode表示迭代模式。其可能的值与含义如下:

RECT 和MASK可以组合使用( 并的关系 )
使用GrabCut算法提取图像的前景
import numpy as np
import cv2
import matplotlib.pyplot as plt
o = cv2.imread('lenacolor.png')
orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB)
mask = np.zeros(o.shape[:2], np.uint8)
bgdModel = np.zeros((1,65), np.float64)
fgdModel = np.zeros((1,65), np.float64)
rect = (50,50,400,500)
cv2.grabCut(o, mask, rect, bgdModel, fgdModel,5, cv2.GC_INIT_WITH_RECT)
mask2 = np.where((mask==2)|(mask==0),0,1).astype('uint8')
ogc = o*mask2[:, :, np.newaxis]
ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB)
plt.subplot(121)
plt.imshow(orgb)
plt.axis('off')
plt.subplot(122)
plt.imshow(ogc)
plt.axis('off')
plt.show()
为了得到完整的前景对象,需要做一些改进。
这里对原始图像进行标注,将需要保留的部分设置为白色,将需要删除的背景设置为黑色。以标记好的图像作为模板,使用函数cv2.grabCut()完成前景的提取。
这个过程主要包含以下步骤:
- 利用函数cv2.grabCut()在cv2.GC_INIT_WITH_RECT 模式下对图像进行初步的前景提取,得到初步提取的结果图像og。
- 使用Windows系统自带的笔刷工具,打开要提取前景的图像,比如lena。
- 使用白色笔刷在希望提取的前景区域做标记。
- 使用黑色笔刷在希望删除的背景区域做标记。
- 将当前设置好的lena图像另存为模板图像m0。
- 将模板图像m0中的白色值和黑色值映射到模板m中。将模板图像m0中的白色值(像素值为255)映射为模板图像m中的确定前景(像素值为1),将模板图像m0中的黑色值(像素值为0)映射为模板图像m中的确定背景(像素值为0)。
- 以模板图像m作为函数cv2.grabCut()的模板参数(mask),对图像og完成前景提取。
使用画笔标记的模板图像m0不能直接作为模板(即参数mask)使用
函数cv2.grabCut()要求,参数mask的值必须是cv2.GC_BGD(确定背景)、cv2.GC_FGD(确定前景)、cv2.GC_PR_BGD(可能的背景)、cv2.GC_PR_FGD(可能的前景),或者是0、1、2、3之中的值。
必须先将模板图像m0中的白色值和黑色值映射到模板m上,再将模板图像m作为函数cv2.grabCut()的模板参数。
在GrabCut算法中使用模板提取图像的前景:
import numpy as np
import cv2
import matplotlib.pyplot as plt
o= cv2.imread('lenacolor.png')
orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB)
mask = np.zeros(o.shape[:2], np.uint8)
bgd = np.zeros((1,65), np.float64)
fgd = np.zeros((1,65), np.float64)
rect = (50,50,400,500)
cv2.grabCut(o, mask, rect, bgd, fgd,5, cv2.GC_INIT_WITH_RECT)
mask2 = cv2.imread('mask.png',0)
mask2Show = cv2.imread('mask.png', -1)
m2rgb=cv2.cvtColor(mask2Show, cv2.COLOR_BGR2RGB)
mask[mask2 == 0] = 0
mask[mask2 == 255] = 1
mask, bgd, fgd = cv2.grabCut(o, mask, None, bgd, fgd,5, cv2.GC_INIT_WITH_MASK)
mask = np.where((mask==2)|(mask==0),0,1).astype('uint8')
ogc = o*mask[:, :, np.newaxis]
ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB)
plt.subplot(121)
plt.imshow(m2rgb)
plt.axis('off')
plt.subplot(122)
plt.imshow(ogc)
plt.axis('off')
plt.show()
在函数cv2.grabCut()的实际使用中,也可以不使用矩形初始化,直接使用模板模式。构造一个模板图像,其中:
- 使用像素值0标注确定背景。
- 使用像素值1标注确定前景。
- 使用像素值2标注可能的背景。
- 使用像素值3标注可能的前景。
构造完模板后,直接将该模板用于函数cv2.grabCut()处理原始图像,即可完成前景的提取。
一般情况下,自定义模板的步骤为:
- 先使用numpy.zeros构造一个内部像素值都是0(表示确定背景)的图像mask,以便在后续步骤中逐步对该模板图像进行细化。
- .使用mask[30:512, 50:400]=3,将模板图像中第30行到第512行,第50列到400列的区域划分为可能的前景(像素值为3,对应参数mask的含义为“可能的前景”)。
- 使用mask[50:300, 150:200]=1,将模板图像中第50行到第300行,第150列到第200列的区域划分为确定前景(像素值为1,对应参数mask的含义为“确定前景”)。
在GrabCut算法中直接使用自定义模板提取图像的前景
import numpy as np
import cv2
import matplotlib.pyplot as plt
o= cv2.imread('lenacolor.png')
orgb=cv2.cvtColor(o, cv2.COLOR_BGR2RGB)
bgd = np.zeros((1,65), np.float64)
fgd = np.zeros((1,65), np.float64)
mask2 = np.zeros(o.shape[:2], np.uint8)
#先将掩模的值全部构造为0(确定背景),在后续步骤中,再根据需要修改其中的部分值
mask2[30:512,50:400]=3 #lena头像的可能区域
mask2[50:300,150:200]=1 #lena头像的确定区域,如果不设置这个区域,头像的提取不完整
cv2.grabCut(o, mask2, None, bgd, fgd,5, cv2.GC_INIT_WITH_MASK)
mask2 = np.where((mask2==2)|(mask2==0),0,1).astype('uint8')
ogc = o*mask2[:, :, np.newaxis]
ogc=cv2.cvtColor(ogc, cv2.COLOR_BGR2RGB)
plt.subplot(121)
plt.imshow(orgb)
plt.axis('off')
plt.subplot(122)
plt.imshow(ogc)
plt.axis('off')
plt.show()
对于不同的图像,要构造不同的模板来划分它们的确定前景、确定背景、可能的前景与可能的背景。
到此这篇关于python中的opencv 图像分割与提取 的文章就介绍到这了,更多相关opencv图像分割 内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python+opencv图像分割实现分割不规则ROI区域方法汇总
在图像分割领域,一个重要任务便是分割出感兴趣(ROI)区域.如果是简易的矩形ROI区域其实是非常容易分割的,opencv的官方python教程里也有教到最简易的矩形ROI分割(剪裁),其本质是多维数组(矩阵)的切片.但是现实情况中,ROI是不规则的多边形,也可能是曲线边界,那么该如何分割出来呢?下面总结几种思路. 可能只提供核心部分的代码示例,具体应用要结合你自己的项目来修正. 一.已知边界坐标,直接画出多边形 例:最基础的画个四边形 # 定义四个顶点坐标 pts = np.array([[10
-
python用opencv完成图像分割并进行目标物的提取
运行平台: Windows Python版本: Python3.x IDE: Spyder 今天我们想实现的功能是对单个目标图片的提取如图所示: 图片读取 ###############头文件 import matplotlib.pyplot as plt import os import cv2 import numpy as np from PIL import Image #from skimage import io import random from PIL import Image
-

Python 深入了解opencv图像分割算法
使用 OpenCV 函数 cv::filter2D 执行一些拉普拉斯滤波以进行图像锐化 使用 OpenCV 函数 cv::distanceTransform 以获得二值图像的派生(derived)表示,其中每个像素的值被替换为其到最近背景像素的距离 使用 OpenCV 函数 cv::watershed 将图像中的对象与背景隔离 加载源图像并检查它是否加载没有任何问题,然后显示它: # Load the image parser = argparse.ArgumentParser(descript
-
Python使用OpenCV和K-Means聚类对毕业照进行图像分割
图像分割是将图像分割成多个不同区域(或片段)的过程.目标是将图像的表示变成更容易和更有意义的图像. 在这篇博客中,我们将看到一种图像分割方法,即K-Means Clustering. K-Means 聚类是一种无监督机器学习算法,旨在将N 个观测值划分为K 个聚类,其中每个观测值都属于具有最近均值的聚类.集群是指由于某些相似性而聚合在一起的数据点的集合.对于图像分割,这里的簇是不同的图像颜色. 我们使用的环境是pip install opencv-python numpy matplotlib
-
python-opencv在有噪音的情况下提取图像的轮廓实例
对于一般的图像提取轮廓,介绍了一个很好的方法,但是对于有噪声的图像,并不能很好地捕获到目标物体. 比如对于我的鼠标,提取的轮廓效果并不好,因为噪声很多: 所以本文增加了去掉噪声的部分. 首先加载原始图像,并显示图像 img = cv2.imread("temp.jpg") #载入图像 h, w = img.shape[:2] #获取图像的高和宽 cv2.imshow("Origin", img) 然后进行低通滤波处理,进行降噪 blured = cv2.blur(i
-
OpenCV-Python使用分水岭算法实现图像的分割与提取
随着当今世界的发展,计算机视觉技术的应用越来越广泛.伴随着硬件设备的不断升级,构造复杂的计算机视觉应用变得越来越容易了.OpenCV像是一个黑盒,让我们专注于视觉应用的开发,而不必过多的关注基础图象处理的具体细节. 图像分割 了解分水岭算法之前,我们需要了解什么是图像的分割. 在图像的处理过程中,经常需要从图像中将前景对象作为目标图像分割或者提取出来.例如,在视频监控中,观测到的是固定背景下的视频内容,而我们对背景本身并无兴趣,感兴趣的是背景中出现的车辆,行人或者其他对象.我们希望将这些对象从视
-
python中的opencv 图像分割与提取
目录 图像分割与提取 用分水岭算法实现图像分割与提取 算法原理 相关函数介绍 分水岭算法图像分割实例 交互式前景提取 图像分割与提取 图像中将前景对象作为目标图像分割或者提取出来.对背景本身并无兴趣分水岭算法及GrabCut算法对图像进行分割及提取. 用分水岭算法实现图像分割与提取 分水岭算法将图像形象地比喻为地理学上的地形表面,实现图像分割,该算法非常有效. 算法原理 任何一幅灰度图像,都可以被看作是地理学上的地形表面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷. 左图是原
-
C++中实现OpenCV图像分割与分水岭算法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征. API介绍 void watershed( InputArray image, InputOutputArray markers ); 参数说明: image: 必须是一个8bit 3通道彩色图像矩阵序列 markers: 在执行分水岭函数watershed之前,必须对第二个参数markers
-
在python中利用opencv简单做图片比对的方法
下面代码中利用了两种比对的方法,一 对图片矩阵(m x m)求解特征值,通过比较特征值是否在一定的范围内,判断图片是否相同.二 对图片矩阵(m x m)中1求和,通过比较sum和来比较图片. # -*- coding: utf-8 -*- import cv2 as cv import numpy as np import os file_dir_a='C:\Users\wt\Desktop\data\image1\\' file_dir_b='C:\Users\wt\Desktop\data\
-
详解在Python中使用OpenCV进行直线检测
目录 1.引言 2.霍夫变换 3.举个栗子 3.1读入图像进行灰度化 3.2执行边缘检测 3.3进行霍夫变换 补充 1. 引言 在图像处理中,直线检测是一种常见的算法,它通常获取n个边缘点的集合,并找到通过这些边缘点的直线.其中用于直线检测,最为流行的检测器是基于霍夫变换的直线检测技术. 2. 霍夫变换 霍夫变换是图像处理中的一种特征提取方法,可以识别图像中的几何形状.它将在参数空间内进行投票来决定其物体形状,通过检测累计结果找到一极大值所对应的解,利用此解即可得到一个符合特定形状的参数. 在使
-
Python中使用Opencv开发停车位计数器功能
目录 1. 环境安装 1.1 安装并激活虚拟环境 1.2 python包安装 2. 绘制停车位矩形框 2.1 导入停车场图片 2.2 绘制矩形框 定位停车位 2.3 鼠标添加.删除停车位 3. 停车位视频分析 3. 1 停车监控视频 3. 2 截取停车位 3. 3 图像处理 3. 4 判断停车位是否被占用 在这个项目中,我们将创建一个停车位计数器.我们会发现总共有多少辆车,以及有多少停车位是空的.关于本教程最好的一点是,我们将使用基本的图像处理技术来解决这个问题,没有使用机器学习.深度学习进行训
-
python中的opencv 图像梯度
目录 图像梯度 Sobel理论基础 计算水平方向偏导数的近似值 计算垂直方向偏导数的近似值 Sobel算子及函数使用 方向 计算x方向和y方向的边缘叠加 Scharr算子及函数使用 Sobel算子和Scharr算子的比较 Laplacian算子及函数使用 算子总结 图像梯度 图像梯度计算的是图像变化的速度.对于图像的边缘部分,其灰度值变化较大,梯度值也较大:相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小.图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的
-
Python中使用OpenCV库来进行简单的气象学遥感影像计算
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库.OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用.OpenCV可用于开发实时的图像处理.计算机视觉以及模式识别程序.该程序库也可以使用英特尔公司的IPP进行加速处理. OpenCV用C++语言编写,它的主要接口也是C++语言,但是依然保留了大量的C语言接口.该库也有大量的Python, Java and MATLAB/OCTAVE
-
树莓派用python中的OpenCV输出USB摄像头画面
本文实例为大家分享了python OpenCV来表示USB摄像头画面的具体代码,供大家参考,具体内容如下 确认Python版本 $ python Python 2.7.13 (default, Jan 19 2019, 14:48:08) [GCC 6.3.0 20170124] on linux2 Type "help", "copyright", "credits" or "license" for more inform
-
python中的opencv和PIL(pillow)转化操作
opencv > pil import cv2 from PIL import Image img = cv2.imread("test.png") image = Image.fromarray(cv2.cvtColor(img,cv2.COLOR_BGR2RGB)) pil > opencv import cv2 from PIL import Image image = Image.open("test.png") img = cv2.cvtCol