C++ OpenCV中几种基本的图像处理方式
目录
- 一、图像显示
- 1、OpenCV的命名空间
- 2、Mat类简析
- 3、图像的载入:imread()函数
- 4、imshow()函数
- 二、图像腐蚀和膨胀
- 三、图像模糊
- 四、canny边缘检测
虽然单单要做车牌号识别的话不需要特别多种类的图像处理,但是我们不能只是为了这么一个目标去学习,所以这次就讲一些OpenCV里基本的图像处理,大家以后可以根据需求使用不同的图像处理。
一、图像显示
【打开Visual Studio】→【新建项目】→【Win32控制台应用项目(修改名称后点确定)】→【下一步】→【空项目(勾起来以后点击确认)】→【解决方案资源管理器】→【源文件】→【新建项】→【添加】→【(修改名称后点击确定)】
(后面的程序都是以这个操作开头的,而我为了方便所以就在一个源文件里进行修改了)
我这次的路径是D:\University\New\Test2\Test2
#include<opencv2\opencv.hpp>
using namespace cv; //包含cv命名空间
void main(){
Mat img = imread("1.jpg"); //载入图片
imshow("【原始图】", img); //显示图像
waitKey(0); //等待任意按键按下
}
此处的1.jpg是放在了上面那个路径里面,出现的效果图:
当然,其实也可以显示不在该文件夹里的图片,只需要将“1.jpg”改成你想要显示的图片所在的路径即可,例如我在D盘存了个2.jpg,我想要显示它,就只需将代码改成Mat img=imread("D://2.jpg");就可以了。
为了和上次的有些区别,我们来稍微讲一下代码中的一些语句的含义。
1、OpenCV的命名空间
OpenCV中的C++类和函数都是定义在命名空间cv之内的,有两种方法可以访问:第一种,是在代码开头的适当位置加上using namespace cv;这句代码,规定程序位于此命名空间之内;另外一种,是在使用OpenCV的每一个类和函数时,都加入cv::命名空间。不用讲都知道,第二种方法十分的繁琐,所以,推荐大家在代码开头的适当位置,加上using namespace cv;这句。
2、Mat类简析
Mat类是用于保存图像以及其他矩阵数据的数据结构,默认情况下其尺寸为0。我们也可以指定其初始尺寸,比如定义一个Mat类对象,就要写cv::Mat pic(320,640,cv::Scalar(100));,Mat类是OpenCV里十分重要,内容有很多,我们这里需要用到的关于Mat的其实就是简单的这样一句代码:Mat img=imread("1.jpg");,所以我就不在多讲了。
3、图像的载入:imread()函数
imread()函数是用于读取文件中的图片到OpenCV中。可以在OpenCV官方文档中查到它的原形,如下:
Mat imread(const string& filename, intflags=1);
第一个参数,const string&类型的filename,填我们需要载入的图片路径名,在Windows操作系统下,OpenCV的imread函数支持如下类型的图像载入。
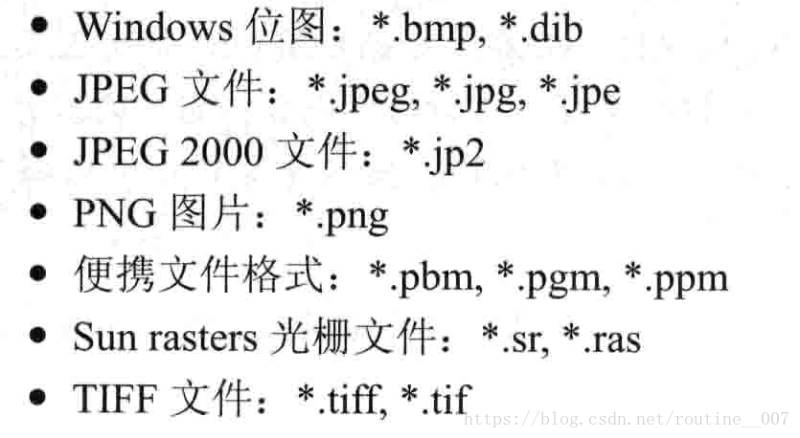
第二个参数,int类型的flags,为载入标识,他指定一个加载图像的颜色类型【这个内容有些生涩难理解,故不多赘述】。
4、imshow()函数
imshow()函数用于在指定的窗口中显示一幅图像,函数原型如下。
void imshow(const string& winname, InputArray mat);
第一个参数,const string&类型的winname,填需要显示的窗口标识名称。
第二个参数,InputArray类型的mat,填需要显示的图像。【很多时候,遇到函数原型中的InputArray/OutputArray类型,我们把它简单地当做Mat类型即可。因为它的定义有些难理解,而且源代码略显冗长,所以不过多赘述】
二、图像腐蚀和膨胀
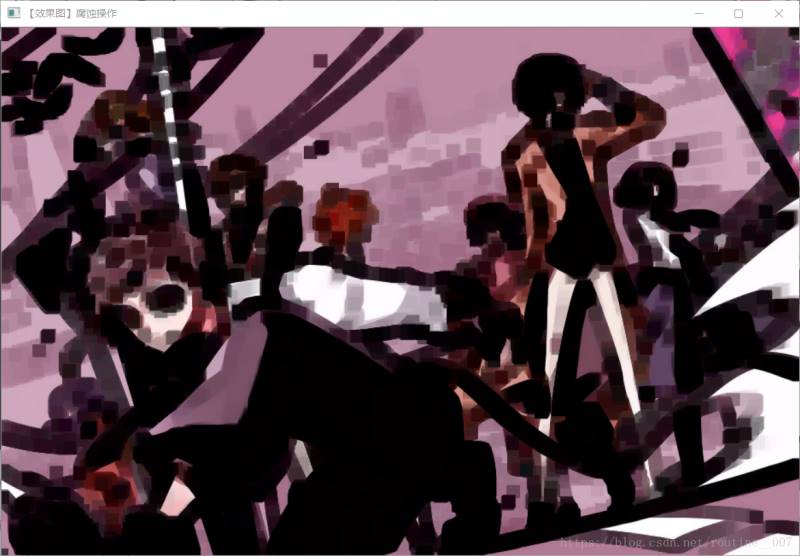
腐蚀,即用图像中的暗色部分“腐蚀”掉图像中的高亮部分。代码如下:
#include<opencv2\highgui\highgui.hpp> //OpenCV highgui模块头文件
#include<opencv2\imgproc\imgproc.hpp> //OpenCV 图像处理头文件
using namespace cv; //包含cv命名空间
int main(){
//载入图片
Mat img = imread("1.jpg");
//显示原图
imshow("【原图】腐蚀操作", img);
//进行腐蚀操作
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15));
Mat dstimg;
erode(img, dstimg, element);
//显示效果图
imshow("【效果图】腐蚀操作", dstimg);
waitKey(0);
return 0;
}
程序首先依然是载入和显示一幅图像,然后定义一个Mat类型的变量来获得getStructuringElement函数的返回值,而getStructuringElement函数的返回值为指定形状和尺寸的结构元素(内核矩阵)。参数准备完毕,接着便可以调用erode函数进行图像腐蚀操作,然后调用imshow函数进行显示。
下面对getStructuringElement函数进行简单的讲述:
第一个参数,内核的形状(一般有下面三种:矩形:MORPH_RECT;交叉形:MORPH_CROSS;椭圆形:MORPH_ELLIPSE)
第二个参数,内核的大小(上面的代码,表示的就是15*15的正方形内核)
效果图如下(原图都和一中的原图一样,故不再显示):
膨胀,和腐蚀相反,从图像直观来看,就是将图像光亮部分放大,黑暗部分缩小。代码如下:
#include<opencv2\highgui\highgui.hpp> //OpenCV highgui模块头文件
#include<opencv2\imgproc\imgproc.hpp> //OpenCV 图像处理头文件
using namespace cv; //包含cv命名空间
int main(){
//载入图片
Mat img = imread("1.jpg");
//显示原图
imshow("【原图】膨胀操作", img);
//进行膨胀操作
Mat element = getStructuringElement(MORPH_RECT, Size(15, 15));
Mat dstimg;
dilate(img, dstimg, element);
//显示效果图
imshow("【效果图】膨胀操作", dstimg);
waitKey(0);
return 0;
}
和腐蚀的代码的区别就只在于调用的函数不同,膨胀调用的是dilate函数。
效果图如下:

三、图像模糊
模糊,对图像进行均值滤波处理,然后就把图像模糊了……代码如下:
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
using namespace cv;
int main(){
//载入原图
Mat img = imread("1.jpg");
//显示原图
imshow("【原图】均值滤波", img);
//进行均值滤波操作
Mat dstimg;
blur(img, dstimg, Size(7, 7));
//显示效果图
imshow("【效果图】均值滤波", dstimg);
waitKey(0);
return 0;
}
blur函数的第三个参数表示的是内核的大小,代码中的意思是像素长宽均为7的一个内核。
效果图如下:

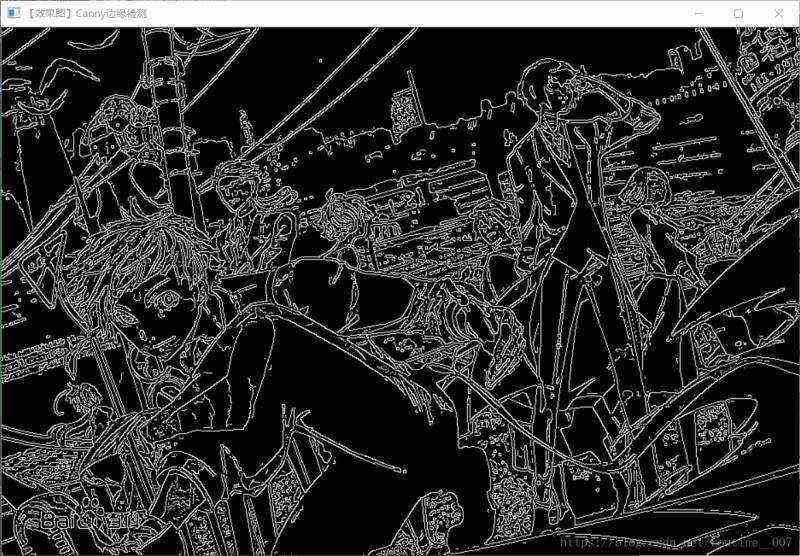
四、canny边缘检测
这个操作会在我们最终要实现的汽车车牌识别中会出现。
载入图像,并将其转成灰度图,再用blur函数进行图像模糊以降噪,然后用canny函数进行边缘检测,最后进行显示。代码如下:
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
using namespace cv;
int main(){
//载入原图
Mat srcImage = imread("1.jpg");
//显示原图
imshow("【原图】Canny边缘检测", srcImage);
Mat dstImage, edge, grayImage;
//【1】创建于src同类型和大小的矩阵dst
dstImage.create(srcImage.size(), srcImage.type());
//【2】将原图像转换成灰度图像
cvtColor(srcImage, grayImage, COLOR_BGR2GRAY);
//【3】先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//【4】运行Canny算子
Canny(edge, edge, 3, 9, 3);
//显示效果图
imshow("【效果图】Canny边缘检测", edge);
waitKey(0);
return 0;
}
简单讲一下Canny函数各参数的意义:
第一个参数:输入,是灰度图,就算是彩色图也会处理成灰度图(但是如果不先转成灰度图像并降噪的话会出现很多原本不存在的线条,大家可以自己尝试一下)
第二个参数:输出的图的位置,输出的图是二值图。
第三四个参数:是两个阈值,上限和下限,如果一个像素的梯度大于上限,则被认为是边缘像素,如果低于下限则被抛弃,如果介于两者之间,只有当其与高于上限阈值的像素连接时才会被接受。
第五个参数:表示模板的大小,如果是3,则表示3*3矩阵的大小。
效果图如下:
到此这篇关于C++ OpenCV中几种基本的图像处理方式的文章就介绍到这了,更多相关C++ OpenCV图像处理方式内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
opencv3/C++图像像素操作详解
RGB图像转灰度图 RGB图像转换为灰度图时通常使用: 进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像. #include<opencv2/opencv.hpp> #include<math.h> using namespace cv; int main() { //像素操作 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(src.empty()) { printf
-

C++中实现OpenCV图像分割与分水岭算法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征. API介绍 void watershed( InputArray image, InputOutputArray markers ); 参数说明: image: 必须是一个8bit 3通道彩色图像矩阵序列 markers: 在执行分水岭函数watershed之前,必须对第二个参数markers
-
opencv3/C++图像滤波实现方式
图像滤波在opencv中可以有多种实现形式 自定义滤波 如使用3×3的掩模: 对图像进行处理. 使用函数filter2D()实现 #include<opencv2/opencv.hpp> using namespace cv; int main() { //函数调用filter2D功能 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(!src.data) { printf("can not l
-
C++ OpenCV制作哈哈镜图像效果
目录 前言 一.凸透镜 1.功能源码 2.效果显示 二.凹透镜 1.功能源码 2.效果显示 三.源码 前言 本文将使用OpenCV C++ 制作哈哈镜图像.其实原理很简单,就是让图像像素扭曲,将像素重新进行映射. 一.凸透镜 制作凸透镜效果(将图像放大).根据网上查找的变换公式: 图像放大:凸透镜 x = (dx / 2)*(sqrt(pow(dx, 2) + pow(dy, 2)) / r) + cx; y = (dy / 2)*(sqrt(pow(dx, 2) + pow(dy, 2)) /
-
C++ OpenCV实现图像去水印功能
目录 前言 一.水印定位 二.图像修复 三.效果显示 四.源码 总结 前言 本文将使用OpenCV C++ 进行简单图像水印去除.我们在网上download图片时,经常因为版权问题有水印.本案例通过编写算法进行简单水印去除. 一.水印定位 如图所示,图像左下角.右下角有水印.第一步,我们首先得定位水印所在位置. Mat gray; cvtColor(src, gray, COLOR_BGR2GRAY); //图像二值化,筛选出白色区域部分 Mat thresh; threshold(gray,
-
C++ OpenCV中几种基本的图像处理方式
目录 一.图像显示 1.OpenCV的命名空间 2.Mat类简析 3.图像的载入:imread()函数 4.imshow()函数 二.图像腐蚀和膨胀 三.图像模糊 四.canny边缘检测 虽然单单要做车牌号识别的话不需要特别多种类的图像处理,但是我们不能只是为了这么一个目标去学习,所以这次就讲一些OpenCV里基本的图像处理,大家以后可以根据需求使用不同的图像处理. 一.图像显示 [打开Visual Studio]→[新建项目]→[Win32控制台应用项目(修改名称后点确定)]→[下一步]→[空
-
Python中几种导入模块的方式总结
模块内部封装了很多实用的功能,有时在模块外部调用就需要将其导入.常见的方式有如下几种: 1 . import >>> import sys >>> sys.path ['', 'C:\\Python34\\Lib\\idlelib', 'C:\\Windows\\system32\\python34.zip', 'C:\\Python34\\DLLs', 'C:\\Python34\\lib', 'C:\\Python34', 'C:\\Python34\\lib\\s
-
go语言中五种字符串的拼接方式(小结)
目录 +拼接方式 sprintf函数 Join函数 buffer.Builderbuffer.WriteString函数 buffer.Builder函数 ps:直接使用运算符 主要结论 +拼接方式 这种方式是我在写golang经常用的方式,go语言用+拼接,php使用.拼接,不过由于golang中的字符串是不可变的类型,因此用 + 连接会产生一个新的字符串对效率有影响. func main() { s1 := "hello" s2 := "word" s3 :=
-
一起聊聊Java中13种锁的实现方式
目录 1.悲观锁 2.乐观锁 3.分布式锁 加锁 4.可重入锁 5.自旋锁 6.独享锁 7.共享锁 8.读锁/写锁 9.公平锁/非公平锁 10.可中断锁/不可中断锁 11.分段锁 12.锁升级(无锁|偏向锁|轻量级锁|重量级锁) 无锁 偏向锁 轻量级锁 重量级锁 13.锁优化技术(锁粗化.锁消除) 最近有很多小伙伴给我留言,分布式系统时代,线程并发,资源抢占,"锁" 慢慢变得很重要.那么常见的锁都有哪些? 今天Tom哥就和大家简单聊聊这个话题. 1.悲观锁 正如其名,它是指对数据修改时
-
Java中两种基本的输入方式小结
目录 两种基本的输入方式 1.使用Scanner类 2.使用System.in.read();方法 输入与输出的使用讲解 1.输入 2.输出 3.输入输出实例 两种基本的输入方式 1.使用Scanner类 需要java.util包 构造Scanner类的对象,附属于标准输入流System.in,之后通过其中的方法获得输入. 常用的方法:nextLine();(字符串),nextInt();(整型数),nextDouble();(双精度型数)等等. 结束时使用close();方法关闭对象. 例子:
-
Go语言中三种不同md5计算方式的性能比较
前言 本文主要介绍的是三种不同的 md5 计算方式,其实区别是读文件的不同,也就是磁盘 I/O, 所以也可以举一反三用在网络 I/O 上.下面来一起看看吧. ReadFile 先看第一种, 简单粗暴: func md5sum1(file string) string { data, err := ioutil.ReadFile(file) if err != nil { return "" } return fmt.Sprintf("%x", md5.Sum(dat
-
Feign调用中的两种Header传参方式小结
目录 Feign调用中的两种Header传参方式 在请求拦截器中统一配置 通过@RequestHeader注解 调用feign接口时,如何往header中添加参数 总结 Feign调用中的两种Header传参方式 在Spring Cloud Netflix栈中,各个微服务都是以HTTP接口的形式暴露自身服务的,因此在调用远程服务时就必须使用HTTP客户端. 我们可以使用JDK原生的URLConnection.Apache的Http Client.Netty的异步HTTP Client, Spri
-
深入学习Python+Opencv常用四种图像处理操作
目录 改变色彩空间: cv.cvtColor() 改变图像大小:cv.resize() 二维卷积操作 常用模糊 opencv图像处理(深度学习中常用的) 改变色彩空间: cv.cvtColor() cv.cvtColor(img, flag) img:原图像 flag:要改变的类型 常用的flag有:cv.COLOR_BGR2GRAY (BGR->GRAY).cv.COLOR_BGR2HSV img = cv.imread(r'E:\0_postgraduate\test.jpg') gray
-
OpenCV中resize函数插值算法的实现过程(五种)
最新版OpenCV2.4.7中,cv::resize函数有五种插值算法:最近邻.双线性.双三次.基于像素区域关系.兰索斯插值.下面用for循环代替cv::resize函数来说明其详细的插值实现过程,其中部分代码摘自于cv::resize函数中的源代码. 每种插值算法的前部分代码是相同的,如下: cv::Mat matSrc, matDst1, matDst2; matSrc = cv::imread("lena.jpg", 2 | 4); matDst1 = cv::Mat(cv::S
-
Opencv中cv2.cvtColor彩色图转灰度图的其他6种方法
目录 1.公式集成: 2.代码实现: 3.实验结果: 4.参考文章: 1.公式集成: 2.代码实现: import os import cv2 import queue import threading import numpy as np #用户存取函数的返回值 q=queue.Queue() def rgb2gray(image,method): h,w,c=image.shape gray=np.zeros((h,w),dtype=np.uint8) y=0 for row in rang