OpenCV-Python图像轮廓之轮廓特征详解
目录
- 前言
- 一、轮廓的矩
- 二、轮廓的面积
- 三、轮廓的长度
- 四、轮廓的近似多边形
- 五、轮廓的凸包
- 六、轮廓的直边界矩形
- 七、轮廓的旋转矩形
- 八、轮廓的最小外包圆
- 九、轮廓的拟合椭圆
- 十、轮廓的拟合直线
- 十一、轮廓的最小外包三角形
前言
图像轮廓是指由位于边缘、连续的、具有相同颜色和强度的点构成的曲线,它可以用于形状分析以及对象检测和识别。
一、轮廓的矩
轮廓的矩包含了轮廓的各种几何特征,如面积、位置、角度、形状等。cv2.moments()函数用于返回轮廓的矩,其基本格式如下:
ret = cv2.moments(array[, binaryImage]) ret为返回的轮廓的矩,是一个字典对象, 大多数矩的含义比较抽象, 但其中的零阶矩(m00)表示轮廓的面积 array为表示轮廓的数组 binaryImage值为True时,会将array对象中的所有非0值设置为1
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('shape2.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
img1 = cv2.drawContours(img1, contours, -1,(0,255,0),2)
cv2.imshow('Contours',img1)
m0 = cv2.moments(contours[0])
m1 = cv2.moments(contours[1])
print('轮廓0的矩:', m0)
print('轮廓1的矩:', m1)
print('轮廓0的面积:', m0['m00'])
print('轮廓1的面积:', m1['m00'])
cv2.waitKey(0)
cv2.destroyAllWindows()

二、轮廓的面积
cv2.contourArea()函数用于返回轮廓的面积,其基本格式如下:
ret = cv2.contourArea(contour[, oriented]) ret为返回的面积 contour为轮廓 oriented为可选参数, 其参数值为True时, 返回值的正与负表示表示轮廓是顺时针还是逆时针, 参数值为False(默认值)时, 函数返回值为绝对值
img = cv2.imread('shape2.jpg')
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
m0 = cv2.contourArea(contours[0])
m1 = cv2.contourArea(contours[1])
print('轮廓0的面积:', m0)
print('轮廓1的面积:', m1)

三、轮廓的长度
cv2.arcLength()函数用于返回轮廓的长度,其基本格式如下:
ret = cv2.cv2.arcLength(contour, closed) ret为返回的长度 contour为轮廓 closed为布尔值, 为True时表示轮廓是封闭的
img = cv2.imread('shape2.jpg')
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
m0 = cv2.arcLength(contours[0], True)
m1 = cv2.arcLength(contours[1], True)
print('轮廓0的长度:', m0)
print('轮廓1的长度:', m1)

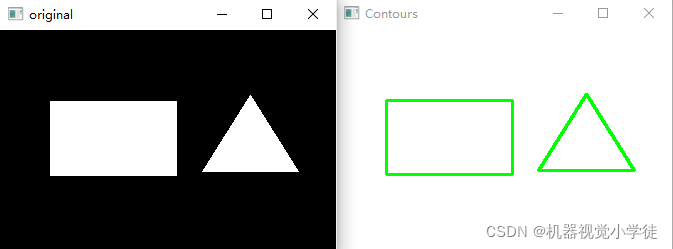
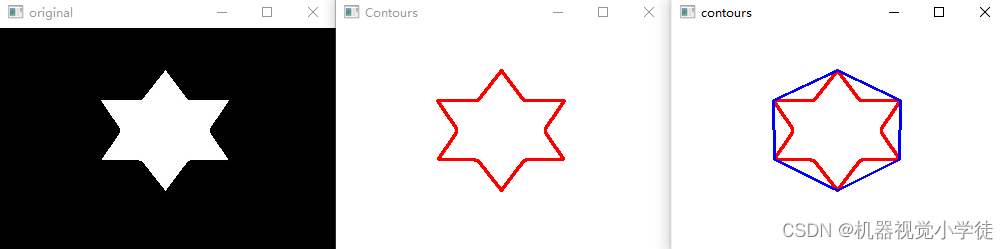
四、轮廓的近似多边形
cv2.approxPolyDP()函数用于返回轮廓的近似多边形,其基本格式如下:
ret = cv2.cv2.arcLength(contour, epsilon, closed) ret为返回的近似多边形 contour为轮廓 epsilon为精度, 表示近似多边形接近轮廓的最大距离 closed为布尔值, 为True时表示轮廓是封闭的
img = cv2.imread('shape3.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
img1 = cv2.drawContours(img1, contours, -1, (0,0,255), 2)
cv2.imshow('Contours',img1)
arcl = cv2.arcLength(contours[0], True)
img2 = img1.copy()
app = cv2.approxPolyDP(contours[0], arcl*0.05, True)
img2 = cv2.drawContours(img2, [app], -1, (255,0,0), 2)
cv2.imshow('contours',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
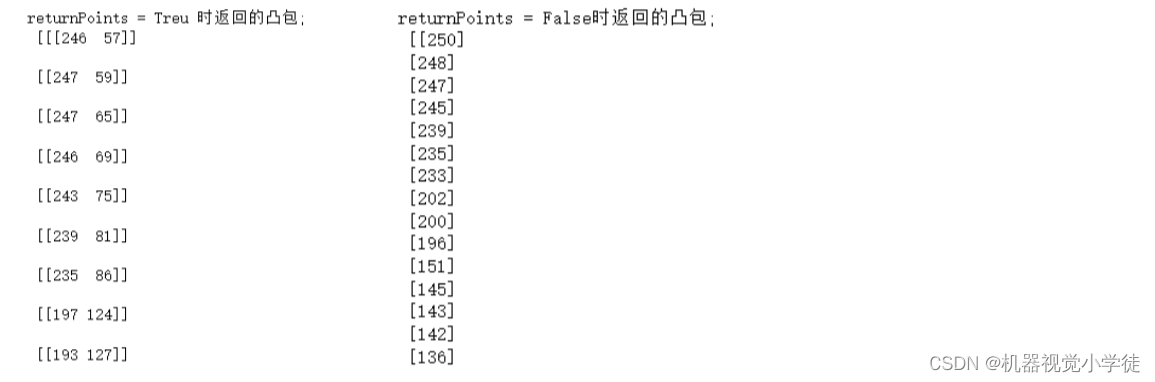
五、轮廓的凸包
cv2.convexHull()函数用于返回轮廓的凸包,其基本格式如下:
hull = cv2.convexHull(contours[, clockwise[, returnPointss]]) hull为返回的凸包, 是一个numpy.ndarray对象, 包含了凸包的关键点 contours为轮廓 clockwise为方向标记, 为True时, 凸包为顺时针方向, 为False(默认值)时, 凸包为逆时针方向 returnPointss为True时(默认值)时, 返回的hull中包含的是凸包关键点的坐标, 为False时, 返回的是凸包关键点在轮廓中的索引
img = cv2.imread('shape3.jpg')
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
img1 = cv2.drawContours(img1, contours, -1, (0,0,255), 2)
cv2.imshow('Contours',img1)
hull = cv2.convexHull(contours[0])
print('returnPoints = Treu 时返回的凸包;\n',hull)
hull2 = cv2.convexHull(contours[0], returnPoints=False)
print('returnPoints = False时返回的凸包;\n',hull2)
cv2.polylines(img1, [hull], True, (255,0,0),2)
cv2.imshow('ConvecHull',img1)
cv2.waitKey(0)
cv2.destroyAllWindows()

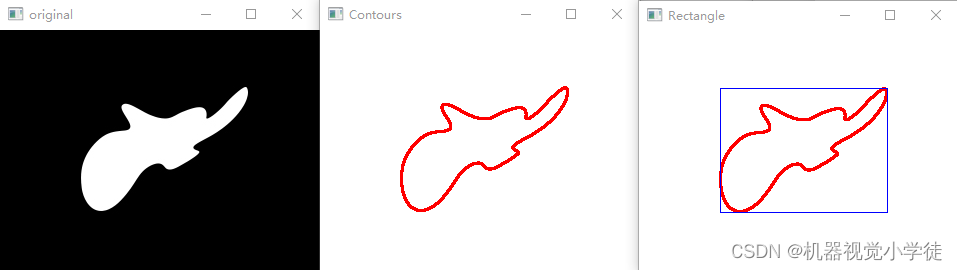
六、轮廓的直边界矩形
轮廓的直边界矩形是指可容纳轮廓的矩形,且矩形的两条边必须是平行的,直边界矩形不一定是面积最小的边界矩形。
cv2.boundingRect()函数用于返回轮廓的直边界矩形,其基本格式如下:
ret = cv2.boundingRect(contours) ret为返回的直边界矩形, 它是一个四元组, 其格式为(矩形左上角x坐标, 矩形左上角y坐标, 矩形的宽度, 矩形的高度) contours为用于计算直边界矩形的轮廓
img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
img1 = cv2.drawContours(img1, contours, -1, (0,0,255), 2)
cv2.imshow('Contours',img1)
ret = cv2.boundingRect(contours[0])
print('直边界矩形:\n', ret)
pt1 = (ret[0], ret[1])
pt2 = (ret[0] + ret[2], ret[1] + ret[3])
img2 = img1.copy()
img2 = cv2.rectangle(img2, pt1, pt2, (255,0,0), 1)
cv2.imshow('Rectangle', img2)
cv2.waitKey(0)
cv2.destroyAllWindows()

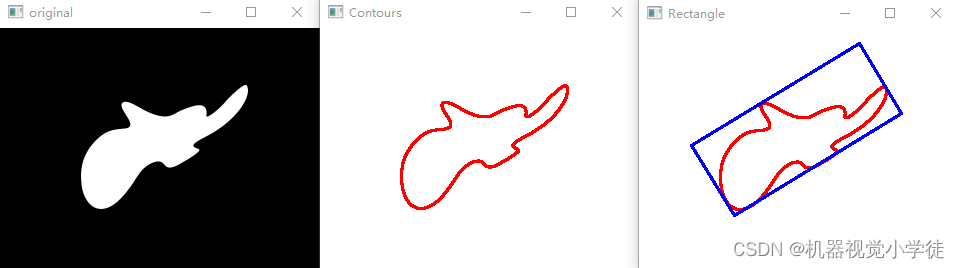
七、轮廓的旋转矩形
轮廓的旋转矩形是指可容纳轮廓的面积最小的矩形。
cv2.minAreaRect()函数用于返回轮廓的旋转矩形,其基本格式如下:
box = cv2.minAreaRect(contour) box为返回的旋转矩阵, 它是一个三元组, 其格式为((矩形中心点x坐标, 矩形中心点y坐标), (矩形的宽度, 矩形的高度), 矩形的旋转角度) contour为用于计算矩形的轮廓
cv2.minAreaRect()函数返回的结果不能直接用于绘制旋转矩形,可以使用cv2.boxPoints()函数将其转换为矩形的顶点坐标,其基本格式如下:
points = cv2.boxPoints(box) points为返回的矩形顶点坐标, 坐标数据为浮点数 box为cv2.minAreaRect()函数返回的矩形数据
img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
cv2.drawContours(img1, contours, -1, (0,0,255) ,2)
cv2.imshow('Contours',img1)
# 计算最小旋转矩形
ret = cv2.minAreaRect(contours[0])
rect = cv2.boxPoints(ret)
rect = np.int0(rect)
img2 = img1.copy()
cv2.drawContours(img2, [rect], 0, (255,0,0), 2)
cv2.imshow('Rectangle', img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
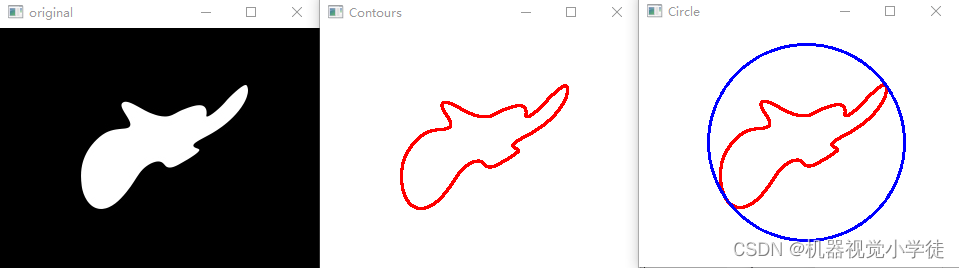
八、轮廓的最小外包圆
cv2.minEnclosingCircle()函数用于返回可容纳轮廓的最小外包圆,其基本格式如下:
center, radius = cv2.minEnclosingCircle(contours) center为圆心 radius为半径 contours为用于计算最小外包圆的轮廓
img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
cv2.drawContours(img1, contours, -1, (0,0,255) ,2)
cv2.imshow('Contours',img1)
# 计算最小外包圆
(x, y), radius = cv2.minEnclosingCircle(contours[0])
center = (int(x),int(y))
radius = int(radius)
img2 = img1.copy()
cv2.circle(img2, center, radius, (255,0,0),2)
cv2.imshow('Circle',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
九、轮廓的拟合椭圆
cv2.fitEllipse()函数用于返回轮廓的拟合椭圆,其基本格式如下:
ellipse = cv2.fitEllipse(contours) ellipse为返回的椭圆 contours为用于计算拟合椭圆的轮廓
img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
cv2.drawContours(img1, contours, -1, (0,0,255) ,2)
cv2.imshow('Contours',img1)
# 计算拟合椭圆
ellipse = cv2.fitEllipse(contours[0])
img2 = img1.copy()
cv2.ellipse(img2, ellipse, (255,0,0),2)
cv2.imshow('Circle',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()

十、轮廓的拟合直线
cv2.fitLine()函数用于返回轮廓的拟合直线,其基本格式如下:
line = cv2.fitLine(contours, distType, param, reps, aeps) line为返回的拟合直线 contours为用于计算拟合直线的轮廓 distType为距离参数类型, 决定如何计算拟合直线 param为距离参数, 与距离参数类型有关, 其设置为0时, 函数将自动选择最优值 reps为计算拟合直线需要的径向精度, 通常设置为0.01 aeps为计算拟合直线需要的轴向精度, 通常设置为0.01
param距离参数类型:

img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
cv2.drawContours(img1, contours, -1, (0,0,255), 2)
cv2.imshow('Contours',img1)
#计算拟合直线
img2 = img1.copy()
rows, cols = img.shape[:2]
[vx, vy, x, y] = cv2.fitLine(contours[0], cv2.DIST_L1, 0, 0.01, 0.01)
lefty = int((-x * vy / vx) + y)
righty = int(((cols - x) * vy / vx) + y)
cv2.line(img2, (0, lefty), (cols-1, righty), (255,0,0), 2)
cv2.imshow('FitLine',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()

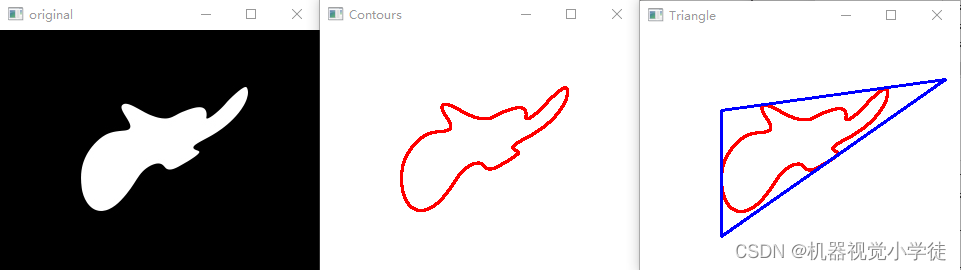
十一、轮廓的最小外包三角形
cv2.minEnclosingTriangle()函数用于返回可容纳轮廓的最小外包三角形,其基本格式如下:
retval, triangle = cv2.minEnclosingTriangle(contours) retval为最小外包三角形的面积 triangle为最小外包三角形 contours为用于计算最小外包三角形的轮廓
img = cv2.imread('shape4.jpg')
cv2.imshow('original', img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(img_gray, 125, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
img1 = np.zeros(img.shape, np.uint8) + 255
cv2.drawContours(img1, contours, -1, (0,0,255) ,2)
cv2.imshow('Contours',img1)
# 计算最小外包三角形
retval, triangle = cv2.minEnclosingTriangle(contours[0])
triangle = np.int0(triangle)
img2 = img1.copy()
cv2.polylines(img2, [triangle], True, (255,0,0),2)
cv2.imshow('Triangle',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上就是OpenCV-Python图像轮廓之轮廓特征详解的详细内容,更多关于OpenCV-Python轮廓特征的资料请关注我们其它相关文章!
相关推荐
-
Python+OpenCV图像处理——实现轮廓发现
简介:轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果. 代码如下: import cv2 as cv import numpy as np def contours_demo(image): dst = cv.GaussianBlur(image, (3, 3), 0) #高斯模糊去噪 gray = cv.cvtColor(dst, cv.COLOR_RGB2GRAY) ret, binary = cv.threshold(gray, 0, 25
-

OpenCV图像轮廓的绘制方法
本文实例为大家分享了检测几何图形轮廓和检测花朵图形轮廓,供大家参考,具体内容如下 OpenCV绘制图像轮廓 绘制轮廓的一般步骤: 1.读取图像 image = cv2.imread('image_path') 2.将原图转化为灰度图像 image_gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) 3.将灰度图像进行二值化阈值处理 # 这里将阈值设置为127为例,最大阈值为255 t, binary = cv.threshold(image_gray, 12
-
python 基于opencv 绘制图像轮廓
图像轮廓概念 轮廓是一系列相连的点组成的曲线,代表了物体的基本外形. 谈起轮廓不免想到边缘,它们确实很像.简单的说,轮廓是连续的,边缘并不全都连续(下图).其实边缘主要是作为图像的特征使用,比如可以用边缘特征可以区分脸和手:而轮廓主要用来分析物体的形态,比如物体的周长和面积等,可以说边缘包括轮廓. 寻找轮廓的操作一般用于二值图像,所以通常会使用阈值分割或Canny边缘检测先得到二值图. 注意:寻找轮廓是针对白色物体的,一定要保证物体是白色,而背景是黑色,不然很多人在寻找轮廓时会找到图片最外面的一
-
OpenCV-Python实现轮廓的特征值
前言 轮廓自身的一些属性特征及轮廓所包围对象的特征对于描述图像具有重要意义.本篇博文将介绍几个轮廓自身的属性特征及轮廓包围对象的特征. 宽高比 在轮廓中,我们可以通过宽高比来描述轮廓,例如矩形的轮廓宽高比为: 宽高比=宽度/高度 下面,我们来计算矩形轮廓的宽高比,代码如下: import cv2 img = cv2.imread("26_1.jpg") cv2.imshow("img", img) # 转换为灰度图像 gray = cv2.cvtColor(img,
-
OpenCV半小时掌握基本操作之图像轮廓
目录 概述 图像轮廓 绘制轮廓 轮廓特征 轮廓近似 边界矩形 外接圆 [OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 图像轮廓 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 图像轮廓 cv2.findContours可以帮助我们查找轮廓. 格式: cv2.findContours(image, mode, method, contours=None, hierarchy=None, offset=Non
-
opencv 图像轮廓的实现示例
图像轮廓 Contours:轮廓 轮廓是将没有连着一起的边缘连着一起. 边缘检测检测出边缘,边缘有些未连接在一起. 注意问题 1.对象为二值图像,首先进行阈值分割或者边缘检测. 2.查找轮廓需要更改原始图像,通常使用原始图像的一份进行拷贝. 3.在opencv里,是从黑色背景里找白色.因此对象必须是白色,背景为黑色. 方法 cv2.findContours() cv2.drawContours() 通过cv2.findContours() 查找轮廓在哪里,再通过 cv2.drawContours
-
Python Opencv实现图像轮廓识别功能
本文实例为大家分享了python opencv识别图像轮廓的具体代码,供大家参考,具体内容如下 要求:用矩形或者圆形框住图片中的云朵(不要求全部框出) 轮廓检测 Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓. import cv2 img = cv2.imread('cloud.jpg') # 灰度图像 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 二值化 ret, binary = cv2.th
-
OpenCV-Python图像轮廓之轮廓特征详解
目录 前言 一.轮廓的矩 二.轮廓的面积 三.轮廓的长度 四.轮廓的近似多边形 五.轮廓的凸包 六.轮廓的直边界矩形 七.轮廓的旋转矩形 八.轮廓的最小外包圆 九.轮廓的拟合椭圆 十.轮廓的拟合直线 十一.轮廓的最小外包三角形 前言 图像轮廓是指由位于边缘.连续的.具有相同颜色和强度的点构成的曲线,它可以用于形状分析以及对象检测和识别. 一.轮廓的矩 轮廓的矩包含了轮廓的各种几何特征,如面积.位置.角度.形状等.cv2.moments()函数用于返回轮廓的矩,其基本格式如下: ret = cv2
-
Python OpenCV对图像进行模糊处理详解流程
其实我们平时在深度学习中所说的卷积操作,在 opencv 中也可以进行,或者说是类似操作.那么它是什么操作呢?它就是图像的模糊(滤波)处理. 均值滤波 使用 opencv 中的cv2.blur(src, ksize)函数.其参数说明是: src: 原图像 ksize: 模糊核大小 原理:它只取内核区域下所有像素的平均值并替换中心元素.3x3 标准化的盒式过滤器如下所示: 特征:核中区域贡献率相同. 作用:对于椒盐噪声的滤除效果比较好. # -*-coding:utf-8-*- ""&q
-
OpenCV实现图像背景虚化效果原理详解
目录 0 写在前面 1 小孔成像 2 光学成像 3 虚化效果 4 代码实战 0 写在前面 相信用过相机的同学都知道虚化特效,这是一种使焦点聚集在拍摄主题上,让背景变得朦胧的效果,例如本文最后实现的背景虚化效果 相机虚化特效背后的原理是什么?和计算机视觉有什么关系?本文带你研究这些问题. 1 小孔成像 小学我们就知道,没有光就不存在图像,为了产生图像,场景必须有一个或多个.直接或间接的光源. 如图所示,光照主要分为三类: 散射 直接光照 漫反射 在获得光源后,将产生从物体到检测平面的光线. 由于从
-
-
OpenCV Python身份证信息识别过程详解
目录 前置环境 识别过程 身份证区域查找 原始图像 灰度处理 中值滤波 二值处理 边缘检测 边缘膨胀 轮廓检测 轮廓排序 透视变换 固定图像大小 检测身份证文本位置 极度膨胀 轮廓查找文本区域 筛选出文本区域 对文本区域进行排序 识别文本 结语 代码 本篇文章使用OpenCV-Python和CnOcr来实现身份证信息识别的案例.想要识别身份证中的文本信息,总共分为三大步骤:一.通过预处理身份证区域检测查找:二.身份证文本信息提取:三.身份证文本信息识别.下面来看一下识别的具体过程CnOcr官网.
-
opencv python 图像轮廓/检测轮廓/绘制轮廓的方法
图像的轮廓检测,如计算多边形外界.形状毕竟.计算感兴趣区域等. Contours : Getting Started 轮廓 简单地解释为连接所有连续点(沿着边界)的曲线,具有相同的颜色或强度. 轮廓是形状分析和物体检测和识别的有用工具 NOTE 为获得更好的准确性,请使用二值图,在找到轮廓之前,应用阈值法或canny边缘检测 从OpenCV 3.2开始,findContours()不再修改源图像,而是将修改后的图像作为三个返回参数中的第一个返回 在OpenCV中,查找轮廓是从黑色背景中查找白色对
-
Python+OpenCV之图像轮廓详解
目录 1. 图像轮廓 1.1 findContours介绍 1.2 绘制轮廓 1.3 轮廓特征 2. 轮廓近似 2.1 轮廓 2.2 边界矩形 2.3 外界多边形及面积 1. 图像轮廓 1.1 findContours介绍 cv2.findContours(img, mode, method) mode:轮廓检索模式 RETR_EXTERNAL :只检索最外面的轮廓: RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中: RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是
-
opencv python图像梯度实例详解
这篇文章主要介绍了opencv python图像梯度实例详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 一阶导数与Soble算子 二阶导数与拉普拉斯算子 图像边缘: Soble算子: 二阶导数: 拉普拉斯算子: import cv2 as cv import numpy as np # 图像梯度(由x,y方向上的偏导数和偏移构成),有一阶导数(sobel算子)和二阶导数(Laplace算子) # 用于求解图像边缘,一阶的极大值,二阶的零点
-
Python OpenCV实现识别信用卡号教程详解
目录 通过与 OpenCV 模板匹配的 OCR 信用卡 OCR 结果 总结 今天的博文分为三个部分. 在第一部分中,我们将讨论 OCR-A 字体,这是一种专为辅助光学字符识别算法而创建的字体. 然后我们将设计一种计算机视觉和图像处理算法,它可以: 本地化信用卡上的四组四位数字. 提取这四个分组中的每一个,然后单独分割 16 个数字中的每一个. 使用模板匹配和 OCR-A 字体识别 16 个信用卡数字中的每一个. 最后,我们将看一些将信用卡 OCR 算法应用于实际图像的示例. 通过与 OpenCV
-
浅谈Python Opencv中gamma变换的使用详解
伽马变换就是用来图像增强,其提升了暗部细节,简单来说就是通过非线性变换,让图像从暴光强度的线性响应变得更接近人眼感受的响应,即将漂白(相机曝光)或过暗(曝光不足)的图片,进行矫正. 伽马变换的基本形式如下: 大于1时,对图像的灰度分布直方图具有拉伸作用(使灰度向高灰度值延展),而小于1时,对图像的灰度分布直方图具有收缩作用(是使灰度向低灰度值方向靠拢). #分道计算每个通道的直方图 img0 = cv2.imread('12.jpg') hist_b = cv2.calcHist([img0],