C++ OpenCV实现白平衡之灰度世界算法
目录
- 实现原理
- 功能函数代码
- C++测试代码
- 测试效果
实现原理
白平衡的意义在于,对在特定光源下拍摄时出现的偏色现象,通过加强对应的补色来进行补偿,使白色物体能还原为白色。
灰度世界算法是白平衡各种算法中最基本的一种。它假设图像世界具备丰富色彩,红蓝绿三通道的灰度值在平均后趋近一致,该值作为“灰色”;若各通道均值偏离“灰色”,则将其进行补偿,使其回归“灰色”,进而实现白平衡的效果。
通俗的讲,若图像中绿色较强,蓝色和红色较弱,则用了灰度世界算法后,绿色会适当减弱,蓝色和红色会适当加强,这样就使原本偏色严重的情况得到了缓解。
灰度世界算法的实现流程如下:
1.计算图像RGB三通道各自的灰度平均值Raver、Gaver、Baver。
2.计算“灰色”:Gray=(Raver+Gaver+Baver)/3。
3.计算三通道的补偿系数,即灰色值除以单通道平均值。
功能函数代码
// 白平衡-灰度世界
cv::Mat WhiteBalcane_Gray(cv::Mat src)
{
cv::Mat result = src.clone();
if (src.channels() != 3)
{
cout << "The number of image channels is not 3." << endl;
return result;
}
// 通道分离
vector<cv::Mat> Channel;
cv::split(src, Channel);
// 计算通道灰度值均值
double Bm = cv::mean(Channel[0])[0];
double Gm = cv::mean(Channel[1])[0];
double Rm = cv::mean(Channel[2])[0];
double Km = (Bm + Gm + Rm) / 3;
// 通道灰度值调整
Channel[0] *= Km / Bm;
Channel[1] *= Km / Gm;
Channel[2] *= Km / Rm;
// 合并通道
cv::merge(Channel, result);
return result;
}
C++测试代码
#include <iostream>
#include <opencv.hpp>
using namespace std;
// 白平衡-灰度世界
cv::Mat WhiteBalcane_Gray(cv::Mat src)
{
cv::Mat result = src.clone();
if (src.channels() != 3)
{
cout << "The number of image channels is not 3." << endl;
return result;
}
// 通道分离
vector<cv::Mat> Channel;
cv::split(src, Channel);
// 计算通道灰度值均值
double Bm = cv::mean(Channel[0])[0];
double Gm = cv::mean(Channel[1])[0];
double Rm = cv::mean(Channel[2])[0];
double Km = (Bm + Gm + Rm) / 3;
// 通道灰度值调整
Channel[0] *= Km / Bm;
Channel[1] *= Km / Gm;
Channel[2] *= Km / Rm;
// 合并通道
cv::merge(Channel, result);
return result;
}
int main()
{
// 载入原图
cv::Mat src = cv::imread("test.jpg");
// 白平衡-灰度世界
cv::Mat result = WhiteBalcane_Gray(src);
// 显示
cv::imshow("src", src);
cv::imshow("result", result);
cv::waitKey(0);
return 0;
}
测试效果

图1 原图

图2 白平衡后图像
如图1所示,是傍晚的一张图像,众所周知,傍晚的色温是较低的,此时采用高于傍晚色温的色温值拍照,就会得到一张暖色系的图片,偏黄;对其进行白平衡,使图片颜色回归真实的环境色温,就得到如图2的效果。

图3 单色原图

图4 白平衡后图像
如图3所示,是一张色彩相对一致的图像,整体呈粉色系,此时应用灰度世界算法,图像会整体调整,使得颜色趋近于灰色;感兴趣的可以去看看该颜色的色条,三通道的数值在180-220左右,没有过大的差异,平衡后三数值接近于190,因而呈灰色。
接下来做个有趣的测试,将原本粉色的墙纸设为较纯的绿色。
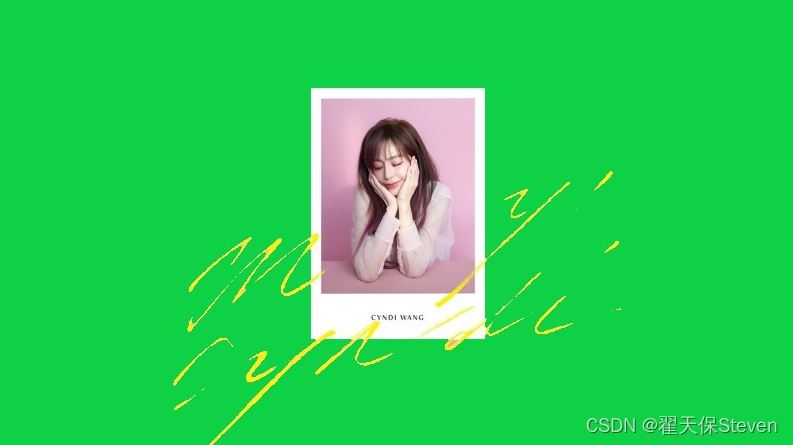
图5 调色后的图像

图6 白平衡后效果
如图5所示,因为图像中存在色调相冲的两个部分,在白平衡后,原本的绿色会调整为深绿色,图像绿色分量降低,其他分量升高,这就导致原本偏粉色的人像区更粉了,这也是该算法的弊端。做该测试也是为了帮助大家更全面深层地理解算法应用场景。
以上就是C++ OpenCV实现白平衡之灰度世界算法的详细内容,更多关于C++ OpenCV灰度世界算法的资料请关注我们其它相关文章!
相关推荐
-

C++ OpenCV实现白平衡之完美反射算法
目录 实现原理 功能函数代码 C++测试代码 测试效果 实现原理 白平衡的意义在于,对在特定光源下拍摄时出现的偏色现象,通过加强对应的补色来进行补偿,使白色物体能还原为白色. 完美反射算法是白平衡各种算法中较常见的一种,比灰度世界算法更优.它假设图像世界中最亮的白点是一个镜面,能完美反射光照:基于白点,将三通道的数值进行适当地调整,以达到白平衡效果:除此之外,还需要统计最亮的一定区间的三通道均值,该均值与该通道最大值的差距决定了该通道调整的力度. 通俗的讲,若图像中绿色分量最大值是255,但是绿
-
C++ OpenCV实现图像双三次插值算法详解
目录 前言 一.图像双三次插值算法原理 二.C++ OpenCV代码 1.计算权重矩阵 2.遍历插值 3. 测试及结果 前言 近期在学习一些传统的图像处理算法,比如传统的图像插值算法等.传统的图像插值算法包括邻近插值法.双线性插值法和双三次插值法,其中邻近插值法和双线性插值法在网上都有很详细的介绍以及用c++编写的代码.但是,网上关于双三次插值法的原理介绍虽然很多,也有对应的代码,但是大多都不是很详细.因此基于自己对原理的理解,自己编写了图像双三次插值算法的c++ opencv代码,在这里记录一
-
C++ opencv利用grabCut算法实现抠图示例
目录 前言 一.grabCut函数 二.compare函数 三.代码 前言 grabCut算法利用了图像中的纹理(颜色)信息和边界(反差)信息,只用少量的用户交互操作,即可得到比较好的分割结果,和分水岭顺丰比较相似,但是计算速度比较慢,得到的结果比较精确 用法:输入一幅图片并对一些像素做属于背景或属于前景的标记,算法会根据这个局部标记计算出整个图像中前景和背景的分割线. 一.grabCut函数 void grabCut(InputArray img, InputOutputArray mask,
-
C++结合OpenCV实现RRT算法(路径规划算法)
目录 1.RRT算法简介 2.算法整体框架流程 2.1 rand点的建立 2.2 near和new点的建立 2.3 安全性检查 2.4 算法结束判断 3.RRT代码框架 3.1 主函数 3.2 地图数据的获取 3.3 RRT算法的实现 3.3.1 起点入树 3.3.2 rand点的获取 3.3.3 near点的获取 3.3.4 new点的获取 3.3.5 安全性检测 3.4 可视化显示 4. 代码运行过程 1.RRT算法简介 代码链接:RRT动图展示 RRT 2.算法整体框架流程 RRT算法整体
-
C++中实现OpenCV图像分割与分水岭算法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征. API介绍 void watershed( InputArray image, InputOutputArray markers ); 参数说明: image: 必须是一个8bit 3通道彩色图像矩阵序列 markers: 在执行分水岭函数watershed之前,必须对第二个参数markers
-
C++ OpenCV实现白平衡之灰度世界算法
目录 实现原理 功能函数代码 C++测试代码 测试效果 实现原理 白平衡的意义在于,对在特定光源下拍摄时出现的偏色现象,通过加强对应的补色来进行补偿,使白色物体能还原为白色. 灰度世界算法是白平衡各种算法中最基本的一种.它假设图像世界具备丰富色彩,红蓝绿三通道的灰度值在平均后趋近一致,该值作为“灰色”:若各通道均值偏离“灰色”,则将其进行补偿,使其回归“灰色”,进而实现白平衡的效果. 通俗的讲,若图像中绿色较强,蓝色和红色较弱,则用了灰度世界算法后,绿色会适当减弱,蓝色和红色会适当加强,这样就使
-
Opencv实现用于图像分割分水岭算法
目标 • 使用分水岭算法基于掩模的图像分割 • 学习函数: cv2.watershed() 原理 任何一幅灰度图像都可以被看成拓扑平面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷.我们向每一个山谷中灌不同颜色的水,随着水的位的升高,不同山谷的水就会相遇汇合,为了防止不同山谷的水汇合,我们需要在水汇合的地方构建起堤坝.不停的灌水,不停的构建堤坝直到所有的山峰都被水淹没.我们构建好的堤坝就是对图像的分割.这就是分水岭算法的背后哲理. 但是这种方法通常都会得到过度分割的结果
-
基于OpenCv的运动物体检测算法
基于一个实现的基于OpenCv的运动物体检测算法,可以用于检测行人或者其他运动物体. #include <stdio.h> #include <cv.h> #include <cxcore.h> #include <highgui.h> int main( int argc, char** argv ) //声明IplImage指针 IplImage* pFrame = NULL; IplImage* pFrImg = NULL; IplImage* pBk
-
opencv实现回形遍历像素算法
本文实例为大家分享了opencv实现回形遍历像素算法的具体代码,供大家参考,具体内容如下 代码实现 # -*- coding:utf-8 -*- import cv2 import numpy as np cv2.namedWindow('img', 0) def traversePixelByCycloidLine(image): """ 从一副灰度图像的中心开始向边缘按回形线的方式遍历所有像素,每个像素只能访问一次. 我目前实现了基本的算法, 但存在以下问题: 1) 只支
-
OpenCV图像分割中的分水岭算法原理与应用详解
图像分割是按照一定的原则,将一幅图像分为若干个互不相交的小局域的过程,它是图像处理中最为基础的研究领域之一.目前有很多图像分割方法,其中分水岭算法是一种基于区域的图像分割算法,分水岭算法因实现方便,已经在医疗图像,模式识别等领域得到了广泛的应用. 1.传统分水岭算法基本原理 分水岭比较经典的计算方法是L.Vincent于1991年在PAMI上提出的[1].传统的分水岭分割方法,是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一像素的灰度值表示该点的海
-
Opencv分水岭算法学习
分水岭算法可以将图像中的边缘转化成"山脉",将均匀区域转化为"山谷",这样有助于分割目标. 分水岭算法是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中的每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形成分水岭.分水岭的概念和形成可以通过模拟浸入过程来说明:在每一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢浸入水中,随着浸入的加深,每一个局部极小值的影响区域慢慢向外扩展,
-
Python OpenCV基于霍夫圈变换算法检测图像中的圆形
目录 第一章:霍夫变换检测圆 ① 实例演示1 ② 实例演示2 ③ 霍夫变换函数解析 第二章:Python + opencv 完整检测代码 ① 源代码 ② 运行效果图 第一章:霍夫变换检测圆 ① 实例演示1 这个是设定半径范围 0-50 后的效果. ② 实例演示2 这个是设定半径范围 50-70 后的效果,因为原图稍微大一点,半径也大了一些. ③ 霍夫变换函数解析 cv.HoughCircles() 方法 参数分别为:image.method.dp.minDist.param1.param2.mi
-
OpenCV图像文件批量读取编程实例
OpenCV编程实例之图像文件批量读取. 本博文摘录<OpenCV图像处理编程实例>2.4章节,更详细的内容请参考本书. 在进行图片序列处理时,我们常常需要读取文件夹下的每一个图片,然后再进行分析处理,因此需要对文件名连续及无规则情况分开讨论.对于文件名连续的情况,文件读取就简单得多,可以利用sprintf函数实现在窗口中连续读取同一文件夹下的图片序列,而对于无规则的情况则可以采用基于C++下WIN32_ FIND_DATA文件的读取方式. 2.4.6 图像批量读取--规则 文件名连续情况下的
-
python实现图像检索的三种(直方图/OpenCV/哈希法)
简介: 本文介绍了图像检索的三种实现方式,均用python完成,其中前两种基于直方图比较,哈希法基于像素分布. 检索方式是:提前导入图片库作为检索范围,给出待检索的图片,将其与图片库中的图片进行比较,得出所有相似度后进行排序,从而检索结果为相似度由高到低的图片.由于工程中还包含Qt界面类.触发函数等其他部分,在该文档中只给出关键函数的代码. 开发系统:MacOS 实现方式:Qt + Python 方法一:自定义的直方图比较算法 a) 基本思路 遍历图片像素点,提取R\G\B值并进行对应的计数,得