opencv3/C++轮廓的提取与筛选方式
轮廓提取
findContours发现轮廓
findContours( InputOutputArray binImg, //输入8bit图像,0值像素值不变,非0的像素看成1;(变为二值图像) OutputArrayOfArrays contours,//输出找到的轮廓对象 OutputArray, hierachy// 图像的拓扑结构 int mode, //轮廓返回的模式(RETR_TREE等) int method,//发现方法(CHAIN_APPROX_SIMPLE等) Point offset=Point()//轮廓像素的位移(默认没有位移(0, 0)) )
【报错问题】
findContours()有时会报告“已触发了一个断点”等错误,尝试过y有效的解决方法有:
1.为vector提前申请一定的空间,如
std::vector<std::vector<Point>> contours(500)
2.Debug版切换为Release版;
drawContours绘制轮廓
drawContours( InputOutputArray binImg, // 输出图像 OutputArrayOfArrays contours,//找到的全部轮廓对象 Int contourIdx//轮廓索引号 const Scalar & color,//绘制颜色 int thickness,//绘制线宽 int lineType ,//线的类型(默认8) InputArray hierarchy,//拓扑结构图 int maxlevel,//最大层数(0只绘制当前的,1表示绘制绘制当前及其内嵌的轮廓) Point offset=Point()//轮廓位移 )
示例:
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src,dst;
src = imread("E:/image/image/shape.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), CV_8UC3);
blur(src,src,Size(3,3));
cvtColor(src,src,COLOR_BGR2GRAY);
Canny(src, src, 20, 80, 3, false);
std::vector<std::vector<Point>> contours;
std::vector<Vec4i> hierarchy;
findContours(src, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
RNG rng(0);
for(int i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255));
drawContours(dst, contours, i, color, 2, 8, hierarchy, 0, Point(0,0));
}
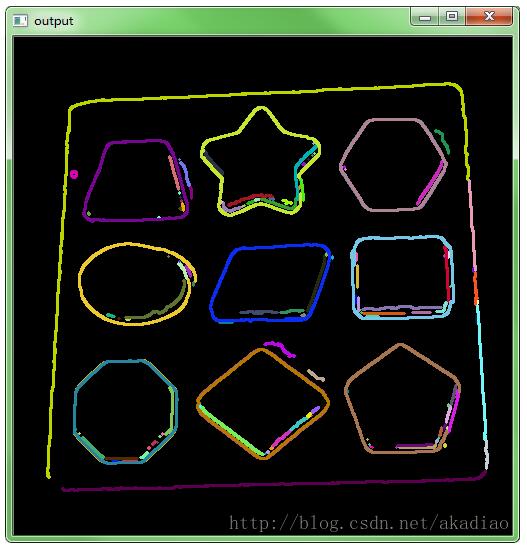
namedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output",dst);
waitKey();
return 0;
}
使用opencv3时(测试用opencv3.1.0)发现,cv命名空间下没有了vector,而在opencv2中(测试用opencv2.4.10)还存在。后查看各自的头文件发现:
opencv.hpp头文件中包含着core.hpp(#include “opencv2/core.hpp”);
而在opencv2的core.hpp中包含有
........ #include <map> #include <new> #include <string> #include <vector> .......
等头文件,但在opencv3的core.hpp中删去这些包含项。
因此在使用opencv3时cv命名空间下没有了vector。
使用opencv2.4.10时可以写:
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src,dst;
src = imread("E:/image/image/shape.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), CV_8UC3);
blur(src,src,Size(5,5));
Canny(src, src, 20, 80, 3, false);
vector<vector<Point>>contours;
vector<Vec4i> hierarchy;
findContours(src, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
RNG rng(0);
for(int i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255));
drawContours(dst, contours, i, color, 2, 8, hierarchy, 0, Point(0,0));
}
namedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output",dst);
waitKey();
return 0;
}
绘制轮廓外矩形框
常用绘制轮廓外形状的函数:
cv::boundingRect(InputArray points)绘制一个矩形(轮廓周围最小矩形左上角点和右下角点)
cv::minAreaRect(InputArray points)绘制轮廓周围最小旋转矩形
cv::minEnclosingCircle(InputArray points, Point2f& center, float& radius)//绘制轮廓周围最小圆形
cv::fitEllipse(InputArray points)绘制轮廓周围最小椭圆
绘制轮廓外矩形框:
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src,dst;
src = imread("E:/image/shape.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), CV_8UC3);
std::vector<std::vector<Point>>contours;
std::vector<Vec4i> hierarchy;
blur(src,src,Size(3,3));
cvtColor(src,src,COLOR_BGR2GRAY);
Canny(src, src, 20, 80, 3, false);
findContours(src, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
RNG rng(0);
std::vector<std::vector<Point>> contoursPloy(contours.size());
std::vector<RotatedRect> minRects(contours.size());
for(int i = 0; i < contours.size(); i++)
{
minRects[i] = minAreaRect(Mat(contours[i]));
Scalar color = Scalar(rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255));
drawContours(dst, contoursPloy, i, color, 1,8,std::vector<Vec4i>(), 0, Point(0, 0));
Point2f rectPoints[4];
minRects[i].points(rectPoints);
for (int j = 0; j < 4; j++)
{
line(dst, rectPoints[j], rectPoints[(j+1)%4], color, 1, 8, 0);
}
}
namedWindow("output", CV_WINDOW_AUTOSIZE);
imshow("output",dst);
waitKey();
return 0;
}


轮廓筛选
moments( InputArray array,//输入数据 bool binaryImage=false //是否为二值图像 ) contourArea( InputArray contour,//输入轮廓数据 bool oriented//返回绝对值(默认false) ) arcLength( InputArray curve,//输入轮廓 bool closed// 轮廓否是封闭曲线 )
轮廓筛选示例:
使用轮廓的面积和长度特征对轮廓进行筛选后用外接矩形将筛选后的轮廓框选出来。
#include<opencv2/opencv.hpp>
using namespace cv;
void trackBar(int,void*);
Mat src,dst;
std::vector<std::vector<Point>>contours;
int area = 0, length = 0;
int main()
{
src = imread("E:/image/shape.jpg");
if(src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src);
dst = Mat::zeros(src.size(), CV_8UC3);
std::vector<Vec4i> hierarchy;
blur(src,dst,Size(3,3));
cvtColor(dst,dst,COLOR_BGR2GRAY);
Canny(dst, dst, 20, 80, 3, false);
findContours(dst, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
namedWindow("output", CV_WINDOW_AUTOSIZE);
createTrackbar("area:", "output", &area,150,trackBar);
createTrackbar("length:", "output", &length,150,trackBar);
waitKey();
return 0;
}
void trackBar(int,void*)
{
Mat src1 = src.clone();
RNG rng(0);
std::vector<std::vector<Point>> contoursPloy(contours.size());
std::vector<RotatedRect> minRects(contours.size());
for(int i = 0; i < contours.size(); i++)
{
if(contourArea(contours[i]) > area && arcLength(contours[i], false) > length)
{
minRects[i] = minAreaRect(Mat(contours[i]));
Scalar color = Scalar(rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255));
//drawContours(dst, contoursPloy, i, color, 1,8,vector<Vec4i>(), 0, Point(0, 0));
Point2f rectPoints[4];
minRects[i].points(rectPoints);
for (int j = 0; j < 4; j++)
{
line(src1, rectPoints[j], rectPoints[(j+1)%4], color, 2, 8, 0);
}
}
}
imshow("output",src1);
src1 = src;
}


以上这篇opencv3/C++轮廓的提取与筛选方式就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
opencv3/C++ 将图片转换为视频的实例
现有一些图片按顺序放置在一文件夹jogging1\下,如图: 需要将其合并转换为一个视频. 示例: 环境:Win7+OpenCV3+VS2012 #include<opencv2/opencv.hpp> #include <stdio.h> #include <io.h> #include <string> #include <iostream> #include <fstream> using namespace std; usin
-
opencv3/C++图像边缘提取方式
canny算子实现 使用track bar 调整canny算子参数,提取到合适的图像边缘. #include<iostream> #include<opencv2/opencv.hpp> using namespace cv; void trackBar(int, void*); int s1=0,s2=0; Mat src, dst; int main() { src = imread("E:/image/image/daibola.jpg"); if(src
-
opencv3/C++图像像素操作详解
RGB图像转灰度图 RGB图像转换为灰度图时通常使用: 进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像. #include<opencv2/opencv.hpp> #include<math.h> using namespace cv; int main() { //像素操作 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(src.empty()) { printf
-
opencv3/C++绘制几何图形实例
在图像上绘制几何图形 #include<iostream> #include<opencv2/opencv.hpp> using namespace cv; Mat src1, dst; void drawRectangle(); void drawLine(); void drawEllipse(); void drawCircle(); void tsxt(); int main() { src1 = imread("E:/image/image/daibola.jp
-
opencv3/C++ 使用Tracker实现简单目标跟踪
简介 MIL: TrackerMIL 以在线方式训练分类器将对象与背景分离;多实例学习避免鲁棒跟踪的漂移问题. OLB: TrackerBoosting 基于AdaBoost算法的在线实时对象跟踪.分类器在更新步骤中使用周围背景作为反例以避免漂移问题. MedianFlow: TrackerMedianFlow 跟踪器适用于非常平滑和可预测的运动,物体在整个序列中可见. TLD: TrackerTLD 将长期跟踪任务分解为跟踪,学习和检测.跟踪器在帧之间跟踪对象.探测器本地化所观察到的所有外观,
-
opencv3/C++轮廓的提取与筛选方式
轮廓提取 findContours发现轮廓 findContours( InputOutputArray binImg, //输入8bit图像,0值像素值不变,非0的像素看成1:(变为二值图像) OutputArrayOfArrays contours,//输出找到的轮廓对象 OutputArray, hierachy// 图像的拓扑结构 int mode, //轮廓返回的模式(RETR_TREE等) int method,//发现方法(CHAIN_APPROX_SIMPLE等) Point o
-
opencv3/C++基于颜色的目标跟踪方式
inRange函数 void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst); src:输入图像: lowerb:下边界数组,阈值下限: upperb:上边界数组,阈值上限: dst:输出图像: 颜色范围如图: 示例: 捕获摄像头中的黄色方块 #include<opencv2/opencv.hpp> using namespace cv; int main() { VideoCaptu
-
opencv3.0识别并提取图形中的矩形的方法
利用opencv来识别图片中的矩形. 其中遇到的问题主要是识别轮廓时矩形内部的形状导致轮廓不闭合. 1. 对输入灰度图片进行高斯滤波 2. 做灰度直方图,提取阈值,做二值化处理 3. 提取图片轮廓 4. 识别图片中的矩形 5. 提取图片中的矩形 1.对输入灰度图片进行高斯滤波 cv::Mat src = cv::imread("F:\\t13.bmp",CV_BGR2GRAY); cv::Mat hsv; GaussianBlur(src,hsv,cv::Size(5,5),0
-
详解用webpack的CommonsChunkPlugin提取公共代码的3种方式
Webpack 的 CommonsChunkPlugin 插件,负责将多次被使用的 JS 模块打包在一起. CommonsChunkPlugin 能解决的问题 在使用插件前,考虑几个问题: 对哪些 chunk 进行提取,这决定了 chunks ,children 和 name 要怎么配置 common chunk 是否异步,这决定了 async 怎么配置 common chunk 的粒度,这决定了 minChunks 和 minSize 怎么配置 以下是官方给出的常用的场景: 提取两个及两个以上
-

C语言实现opencv提取直线、轮廓及ROI实例详解
一.Canny检测轮廓 在上一篇文章中有提到sobel边缘检测,并重写了soble的C++代码让其与matlab中算法效果一致,而soble边缘检测是基于单一阈值的,我们不能兼顾到低阈值的丰富边缘和高阈值时的边缘缺失这两个问题.而canny算子则很好的弥补了这一不足,从目前看来,canny边缘检测在做图像轮廓提取方面是最优秀的边缘检测算法. canny边缘检测采用双阈值值法,高阈值用来检测图像中重要的.显著的线条.轮廓等,而低阈值用来保证不丢失细节部分,低阈值检测出来的边缘更丰富,但是很多边缘并
-
Django使用HTTP协议向服务器传参方式小结
目录 1.查询字符串数据(query string): 2. 提取请求体数据 2.1 表单类型请求体数据(Form Data) 2.2 非表单类型请求体数据(Non-Form Data):JSON 3. URL路径参数:提取URL路径中的特定部分数据 3.1 path()提取路径参数 3.2 re_path()提取路径参数 3.3 path()和re_path()如何选择? 4. 请求头 5. 其他常用HttpRequest对象属性 用户发送请求时携带的参数后端需要使用,而不同的发送参数的方式对
-
Python 数据筛选功能实现
目录 1.列表 2.字典 3.数据框 无论是在数据分析还是数据挖掘的时候,数据筛选总会涉及到.这里我总结了一下python中列表,字典,数据框中一些常用的数据筛选的方法. 1.列表 案例一:从一个含有数字0-9的列表中筛选出偶数(奇数): 1.enumerate方法(生成两列数据,第一列是索引,第二列是数值) num=[i for i in range(10)] num1=[] for index,count in enumerate(num): if count%2==0: num1.appe
-
opencv实现机器视觉检测和计数的方法
引言 在机器视觉中,有时需要对产品进行检测和计数.其难点无非是对于产品的图像分割. 由于之前网购的维生素片,有时候忘了今天有没有吃过,就想对瓶子里的药片计数...在学习opencv以后,希望实现对于维生素片分割计数算法.本次实战在基于形态学的基础上又衍生出基于距离变换的分水岭算法,使其实现的效果更具普遍性. 基于形态学的维生素片检测和计数 整体思路: 读取图片 形态学处理(在二值化前进行适度形态学处理,效果俱佳) 二值化 提取轮廓(进行药片分割) 获取轮廓索引,并筛选所需要的轮廓 画出轮廓,显示
-
OpenCV实现图像校正功能
一. 需求分析 首先是需求: 1.利用 OpenCV 里面的仿射变换函 数实现对图像进行一些基本的变换,如平移.旋转.缩放 2.学习透视变换原理,对一个矩形进行透视变换,并将变换结果绘制出来.先调用 OpenCV 函数实现透视变换,自己编写代码实现透视变换. 3.识别一张倾斜拍摄的纸张,找出轮廓,提取出该纸张的位置 4. 假设你已通过图像处理的算法找到发生形变的纸张的位置,那么对这个倾斜 纸张进行变换,得到纸张的垂直视图,实现文档校准. 然后是分析: 1.首先要调用OpenCV的函数对图像进行平
-
python爬虫学习笔记之Beautifulsoup模块用法详解
本文实例讲述了python爬虫学习笔记之Beautifulsoup模块用法.分享给大家供大家参考,具体如下: 相关内容: 什么是beautifulsoup bs4的使用 导入模块 选择使用解析器 使用标签名查找 使用find\find_all查找 使用select查找 首发时间:2018-03-02 00:10 什么是beautifulsoup: 是一个可以从HTML或XML文件中提取数据的Python库.它能够通过你喜欢的转换器实现惯用的文档导航,查找,修改文档的方式.(官方) beautif