OpenCV获取图像中直线上的数据具体流程
需求说明
在对图像进行处理时,经常会有这类需求:客户想要提取出图像中某条直线或者ROI区域内的感兴趣数据,进行重点关注。该需求在图像检测领域尤其常见。ROI区域一般搭配Rect即可完成提取,直线数据的提取没有现成的函数,需要自行实现。
当直线为纵向或者横向时,比较简单,只需要从起点到终点提取该行或者列的数据即可;但是直线若为斜向的,则需要从起点出发,向终点方向逐个像素提取。大家都知道,图像是由许多像素组成,而斜向直线的数据提取路线并不一定就是标准的斜线,也可能是呈阶梯状的路线,而如何进行路线设计,就是本文所要展示的内容。
具体流程
1)建立vector<pair<float,int>> result容器用于存放数据,设置初始化参数。其中,inImage是输入图像,start为起点,end为终点,点的类型为cv::Point。
vector<pair<float, int>> result; int row = inImage.rows; int col = inImage.cols; int r1 = start.y; int c1 = start.x; int r2 = end.y; int c2 = end.x;
2)确定两点间距离dist,将起点到终点的横坐标差和纵坐标差进行勾股定理可得。所得距离可能为带小数的数据,然而像素的个数都为整数,所以进行四舍五入。除此之外,还要判断下距离,若距离为0,则只返回起点数据。
float dist = round(sqrt(pow(float(r2) - float(r1), 2.0) + pow(float(c2) - float(c1), 2.0)));
if (dist <= 0.00001f) {
pair<float, int> temp;
temp.first = inImage.at<float>(r1, c1);
temp.second = 0;
result.push_back(temp);
return result;
}
3)确定横向纵向的步进间隔。
float slope_r = (float(r2) - float(r1)) / dist; float slope_c = (float(c2) - float(c1)) / dist;
4)建立Flag地图,用于标记已存储过的位置,避免同一数据二次放入。
cv::Mat Flag = cv::Mat::zeros(mask.size(), mask.type());
5)开始存储数据。计数从0开始,若该点处于掩膜内,且Flag地图中没有标记,则进行存储。
int k = 0;
for (float i = 0; i <= dist; ++i) {
// 若该点处于掩膜内,且未被Flag存储,则进行存储工作
if ((mask.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 255)
&& (Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 0))
{
pair<float, int> temp;
temp.first = inImage.at<float>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c)));
temp.second = k;
Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) = 255;
k++;
result.push_back(temp);
}
}
功能函数
/**
* @brief GetOneDimLineData 获取一维直线数据
* @param inImage 输入位相图
* @param mask 输入掩膜图
* @param start 起始点坐标
* @param end 终点坐标
* @return 直线数据(数值&序号)
*/
vector<pair<float, int>> GetOneDimLineData(const cv::Mat inImage, cv::Mat mask, cv::Point start, cv::Point end)
{
vector<pair<float, int>> result;
int row = inImage.rows;
int col = inImage.cols;
int r1 = start.y;
int c1 = start.x;
int r2 = end.y;
int c2 = end.x;
// 确定两点间距离
float dist = round(sqrt(pow(float(r2) - float(r1), 2.0) + pow(float(c2) - float(c1), 2.0)));
if (dist <= 0.00001f) {
pair<float, int> temp;
temp.first = inImage.at<float>(r1, c1);
temp.second = 0;
result.push_back(temp);
return result;
}
// 横向纵向的步进间隔
float slope_r = (float(r2) - float(r1)) / dist;
float slope_c = (float(c2) - float(c1)) / dist;
// Flag地图,用于存储已放入的数据,避免同一数据二次放入
cv::Mat Flag = cv::Mat::zeros(mask.size(), mask.type());
// 数据量计数,从0开始
int k = 0;
for (float i = 0; i <= dist; ++i) {
// 若该点处于掩膜内,且未被Flag存储,则进行存储工作
if ((mask.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 255)
&& (Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 0))
{
pair<float, int> temp;
temp.first = inImage.at<float>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c)));
temp.second = k;
Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) = 255;
k++;
result.push_back(temp);
}
}
return result;
}
C++测试代码
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/highgui.hpp>
using namespace std;
using namespace cv;
vector<pair<float, int>> GetOneDimLineData(const cv::Mat inImage, cv::Mat mask, cv::Point start, cv::Point end);
int main()
{
Mat src(10,10,CV_32FC1,nan(""));
for (int i = 3; i < 7; ++i)
{
for (int j = 3; j < 9; ++j)
{
src.at<float>(i, j) = rand() % 255;
}
}
cv::Mat mask = cv::Mat::zeros(src.size(), CV_8UC1);
mask.setTo(255, src == src);
Point start = Point(2, 1);
Point end = Point(8, 7);
vector<pair<float, int>> test= GetOneDimLineData(src,mask, start, end);
cout << "size:" << test.size() << endl;
for (int i=0;i<test.size();++i)
{
cout << i << ":" << endl;
cout << test[i].first << " " << test[i].second << endl;
}
return 0;
}
/**
* @brief GetOneDimLineData 获取一维直线数据
* @param inImage 输入位相图
* @param mask 输入掩膜图
* @param start 起始点坐标
* @param end 终点坐标
* @return 直线数据(数值&序号)
*/
vector<pair<float, int>> GetOneDimLineData(const cv::Mat inImage, cv::Mat mask, cv::Point start, cv::Point end)
{
vector<pair<float, int>> result;
int row = inImage.rows;
int col = inImage.cols;
int r1 = start.y;
int c1 = start.x;
int r2 = end.y;
int c2 = end.x;
// 确定两点间距离
float dist = round(sqrt(pow(float(r2) - float(r1), 2.0) + pow(float(c2) - float(c1), 2.0)));
if (dist <= 0.00001f) {
pair<float, int> temp;
temp.first = inImage.at<float>(r1, c1);
temp.second = 0;
result.push_back(temp);
return result;
}
// 横向纵向的步进间隔
float slope_r = (float(r2) - float(r1)) / dist;
float slope_c = (float(c2) - float(c1)) / dist;
// Flag地图,用于存储已放入的数据,避免同一数据二次放入
cv::Mat Flag = cv::Mat::zeros(mask.size(), mask.type());
// 数据量计数,从0开始
int k = 0;
for (float i = 0; i <= dist; ++i) {
// 若该点处于掩膜内,且未被Flag存储,则进行存储工作
if ((mask.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 255)
&& (Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) == 0))
{
pair<float, int> temp;
temp.first = inImage.at<float>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c)));
temp.second = k;
Flag.at<uchar>(int(r1) + int(round(i * slope_r)), int(c1) + int(round(i * slope_c))) = 255;
k++;
result.push_back(temp);
}
}
return result;
}
测试效果
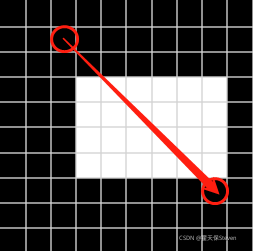
图1 初始化测试图像
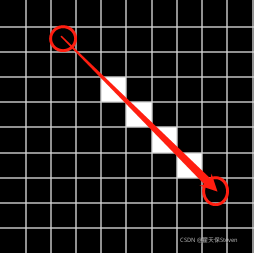
图2 Flag地图

图3 结果打印
不难看出,获取的数据为直线上数据。对于有一定斜度的直线,Flag地图可能呈现阶梯状步进路线,这也是正常的~
如果函数有什么可以改进完善的地方,非常欢迎大家指出,一同进步何乐而不为呢~
到此这篇关于OpenCV获取图像中直线上的数据具体流程的文章就介绍到这了,更多相关OpenCV获取图像数据内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
pytorch读取图像数据转成opencv格式实例
pytorch读取图像数据转成opencv格式方法:先转成numpy通用的格式,再将其转换成opencv格式. pytorch读取的数据使用loaddata这类函数实现.pytorch网络输入图像的格式为(C, H, W),就是(通道数,高,宽)而numpy中图像的格式为(H,W,C). 那就将其通道调换一下.用到函数transpose. 转换方法如下 例如A 的格式为(c,h,w) 那么经过 A = A.transpose(1,2,0) 后就变成了(h,w,c)了 然后用语句 B= cv2.c
-
利用OpenCV中对图像数据进行64F和8U转换的方式
在OpenCV中很多对数据的运算都需要转换为64F类型,比如伽玛变换,这个很明显要求幂的底数是double类型~ 而cvShowImage()又要求是U8才能显示,否则显示出来是一片空白! 所以经常要进行转换,怎么做呢?看了下面的几行代码你就知道了! IplImage *pSrcImage = cvLoadImage("pout.jpg", CV_LOAD_IMAGE_UNCHANGED); IplImage *pGrayImage_8U = cvCreateImage(cvGetSi
-

OpenCV获取图像中直线上的数据具体流程
需求说明 在对图像进行处理时,经常会有这类需求:客户想要提取出图像中某条直线或者ROI区域内的感兴趣数据,进行重点关注.该需求在图像检测领域尤其常见.ROI区域一般搭配Rect即可完成提取,直线数据的提取没有现成的函数,需要自行实现. 当直线为纵向或者横向时,比较简单,只需要从起点到终点提取该行或者列的数据即可:但是直线若为斜向的,则需要从起点出发,向终点方向逐个像素提取.大家都知道,图像是由许多像素组成,而斜向直线的数据提取路线并不一定就是标准的斜线,也可能是呈阶梯状的路线,而如何进行路线设计
-
OpenCV提取图像中圆线上的数据具体流程
目录 需求说明 具体流程 功能函数 C++测试代码 测试效果 总结 需求说明 在对图像进行处理时,经常会有这类需求:客户想要提取出图像中某条直线.圆线或者ROI区域内的感兴趣数据,进行重点关注.该需求在图像检测领域尤其常见.ROI区域一般搭配Rect即可完成提取,直线和圆线数据的提取没有现成的函数,需要自行实现. 直线的提取见: OpenCV获取图像中直线上的数据具体流程 而圆线的提取则是本文要将的内容,对圆线而言,将线上某点作为起点,沿顺时针或逆时针方向依次提取感兴趣数据,可放置在容器中.那么
-
OpenCV实现霍夫变换直线检测
霍夫变换(Hough Transform)是图像处理中检测是否存在直线的重要算法,该算法是由Paul Hough在1962年首次提出,最开始只能检测图像中的直线,但是霍夫变换经过不断的扩展和完善已经可以检测多种规则形状,例如圆形.椭圆等.霍夫变换通过将图像中的像素在一个空间坐标系中变换到另一个坐标空间坐标系中,使得在原空间中具有形同特性的曲线或者直线映射到另一个空间中形成峰值,从而把检测任意形状的问题转化为统计峰值的问题. 霍夫变换通过构建检测形状的数学解析式将图像中像素点映射到参数空间中,例如
-
详解NumPy中的线性关系与数据修剪压缩
目录 摘要 一.用线性模型预测价格 二.趋势线 三.数组的修剪和压缩 四.阶乘 摘要 总结股票均线计算原理--线性关系,也是以后大数据处理的基础之一,NumPy的 linalg 包是专门用于线性代数计算的.作一个假设,就是一个价格可以根据N个之前的价格利用线性模型计算得出. 前一篇,在计算均线,指数均线时,分别计算了不同的权重,比如 和 都是按不同的计算方法来计算出相关的权重,一个股价可以用之前股价的线性组合表示出来,也即,这个股价等于之前的股价与各自的系数相乘后再做加和的结果,但是,这些系数是
-
详解在vue-cli项目中使用mockjs(请求数据删除数据)
在我们的生产实际中,后端的接口往往是较晚才会出来,于是我们的前端的许多开发都要等到接口给我们才能进行,这样对于我们前端来说显得十分的被动,于是有没有可以制造假数据来模拟后端接口呢,答案是肯定的.于是今天我们来介绍一款非常强大的插件Mock.js,可以非常方便的模拟后端的数据,也可以轻松的实现增删改查这些操作,在后台数据完成之后,你所做的只是去掉mockjs:停止拦截真实的ajax,仅此而已. 搭建一个vue项目 # 全局安装 vue-cli $ npm install --global vue-
-
C#中WPF ListView绑定数据的实例详解
C#中WPF ListView绑定数据的实例详解 WPF中ListView用来显示数据十分方便, 我们可以将它分成几个列,每一个列用来显示一条数据,但是又是在一方之中. 那么怎样实现这样的效果的呢,这就要用绑定了. 我们先来看一看他的xmal代码 <ListView Name="receiveList" Grid.Row="0"> <ListView.View> <GridView> <GridView.Columns>
-
Ruby on Rails中MVC结构的数据传递解析
如果读者已经开发过基于 Rails 的应用,但对其 MVC 间的数据传递还有诸多困惑,那么恭喜您,本文正是要总结梳理 Rails 数据传递的方法和技巧.Ruby on Rails 3(以下统称为 Rails 3)是当前的主要发布版本,本文所述及的内容和代码都基于此版本. Rails 3 简介 Ruby on Rails 是一个 Ruby 实现.采用 MVC 模式的开源 Web 应用开发框架,能够提供 Web 应用的全套解决方案.它的"习惯约定优于配置"的设计哲理,使得 Web 开发人员
-
详解angularJs中自定义directive的数据交互
就我对directive的粗浅理解,它一般用于独立Dom元素的封装,应用场合为控件重用和逻辑模块分离.后者我暂时没接触,但数据交互部分却是一样的.所以举几个前者的例子,以备以后忘记. directive本身的作用域$scope可以选择是否封闭,不封闭则和其controller共用一个作用域$scope.例子如下: <body ng-app="myApp" ng-controller="myCtrl"> <test-directive><
-
Angular中ng-options下拉数据默认值的设定方法
今天学习了一下Angular中ng-options下拉数据默认值的设定方法,留个笔记 直接上代码 <div class="form-group"> <label class="col-sm-2 control-label">教师</label> <div class="col-sm-10"> <select style="display:block; width:100%; heig
-
ASP.NET中文件上传下载方法集合
文件的上传下载是我们在实际项目开发过程中经常需要用到的技术,这里给出几种常见的方法,本文主要内容包括: 1.如何解决文件上传大小的限制 2.以文件形式保存到服务器 3.转换成二进制字节流保存到数据库以及下载方法 4.上传Internet上的资源 第一部分: 首先我们来说一下如何解决ASP.NET中的文件上传大小限制的问题,我们知道在默认情况下ASP.NET的文件上传大小限制为2M,一般情况下,我们可以采用更改WEB.Config文件来自定义最大文件大小,如下: <httpRuntime exec