OpenCV实现图像背景虚化效果原理详解
目录
- 0 写在前面
- 1 小孔成像
- 2 光学成像
- 3 虚化效果
- 4 代码实战
0 写在前面
相信用过相机的同学都知道虚化特效,这是一种使焦点聚集在拍摄主题上,让背景变得朦胧的效果,例如本文最后实现的背景虚化效果

相机虚化特效背后的原理是什么?和计算机视觉有什么关系?本文带你研究这些问题。
1 小孔成像
小学我们就知道,没有光就不存在图像,为了产生图像,场景必须有一个或多个、直接或间接的光源。
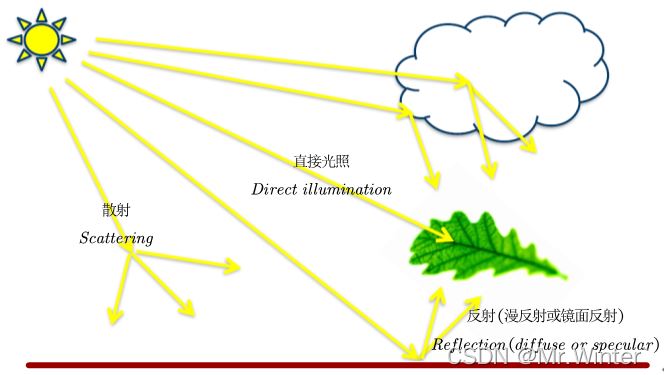
如图所示,光照主要分为三类:
- 散射
- 直接光照
- 漫反射
在获得光源后,将产生从物体到检测平面的光线。
由于从物体上某点A出发存在无数条四散的光线到达检测平面,因此可以认为A的成像点A’均匀地分布在成像平面上,同理其他点亦然。所以这种情况下,检测平面上是无数张物体图像的混叠,导致成像模糊甚至无法成像。
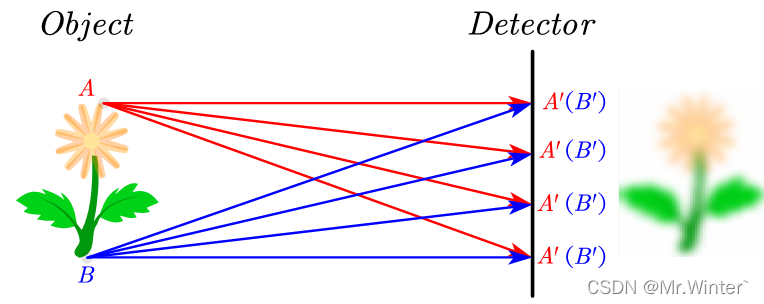
面对一张白纸上看不到你的脸,不是因为白纸上没有来自于你的光线,而是因为来自于你不同部分的光线在白纸上产生了重叠,不信你试试?
那如何在白纸上成像?
其实非常简单,采用小学就尝试过的小孔成像

本质上小孔相当于一个滤光器,仅保留从物点发出的少数光线,此时应能获得清晰的图像。
2 光学成像
小孔成像的缺陷是成像光线较少,亮度低。为了既能获得较多光线,又不让像点四散在检测面上造成影像重叠,引入具有聚光性的透镜。透镜成像与小孔成像的本质都是避免因像点四散导致的无法成像,前者利用聚光,后者则利用滤光。
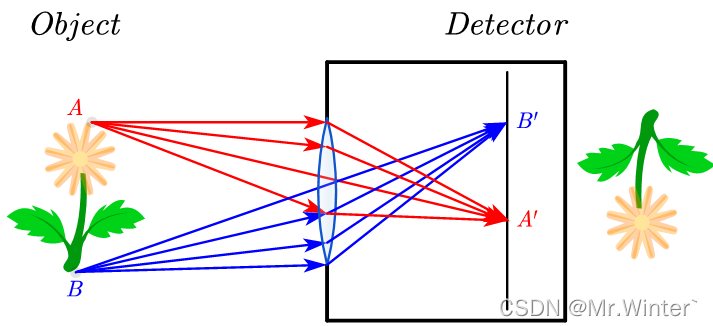
现代相机在应用上通常使用透镜成像,但不管是透镜成像还是小孔成像,都是计算机视觉研究的基本模型和假设,例如透视几何、相机内参矩阵、畸变修正等等,因此本节对于建立机器视觉的研究思维很有帮助。
3 虚化效果
介绍完前面的基础知识,终于开始图像虚化特效的原理啦!
理想透镜应保证光线聚焦于一点——焦点,这个点不会产生任何成像混叠,图像最清晰。在焦点前后光线开始四散,形成不同程度的成像重叠区域,称为弥散圆,对于人眼而言,在一定范围内影象产生的模糊是不能辨认的,不能辨认的弥散圆范围称为容许弥散圆
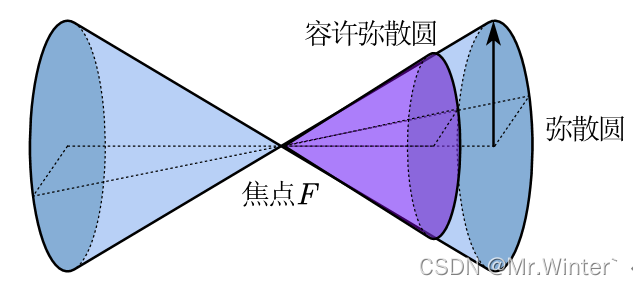
当对被摄主体平面调焦时,因为容许弥散圆的存在,在一定离焦范围内,成像仍然清晰,这个范围称为焦深。调整成像面和镜头距离,使成像面处于焦深内,物体可以清晰成像的过程,称为对焦。
类似地,对被摄物体而言,位于调焦物平面前后的能相对清晰成像的景物间纵深距离称为景深。图像虚化效果就和这个景深有关系!
- 景深越小,被摄物体前后能清晰成像的范围越小,也就相应地出现朦胧虚化的效果
- 景深越大,被摄物体前后能清晰成像的范围越大,也就没有虚化效果

如何调节景深?记住一句话:光圈越大景深越小,所以拿手机拍照的时候,大光圈也就代表了虚化效果!
所以下次有机会给女生拍照的话,请先确认
“请问你喜欢小景深还是大景深?”
4 代码实战
相机背景虚化特效在图像处理中可以采用引导滤波器实现,源码如下。
//引导滤波器
Mat guidedFilter(Mat& srcMat, Mat& guidedMat, int radius, double eps)
{
srcMat.convertTo(srcMat, CV_64FC1);
guidedMat.convertTo(guidedMat, CV_64FC1);
// 计算均值
Mat mean_p, mean_I, mean_Ip, mean_II;
boxFilter(srcMat, mean_p, CV_64FC1, Size(radius, radius)); // 生成待滤波图像均值mean_p
boxFilter(guidedMat, mean_I, CV_64FC1, Size(radius, radius)); // 生成引导图像均值mean_I
boxFilter(srcMat.mul(guidedMat), mean_Ip, CV_64FC1, Size(radius, radius)); // 生成互相关均值mean_Ip
boxFilter(guidedMat.mul(guidedMat), mean_II, CV_64FC1, Size(radius, radius)); // 生成引导图像自相关均值mean_II
// 计算相关系数、Ip的协方差cov和I的方差var------------------
Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);
Mat var_I = mean_II - mean_I.mul(mean_I);
// 计算参数系数a、b
Mat a = cov_Ip / (var_I + eps);
Mat b = mean_p - a.mul(mean_I);
// 计算系数a、b的均值
Mat mean_a, mean_b;
boxFilter(a, mean_a, CV_64FC1, Size(radius, radius));
boxFilter(b, mean_b, CV_64FC1, Size(radius, radius));
// 生成输出矩阵
Mat dstImage = mean_a.mul(srcMat) + mean_b;
return dstImage;
}
关于引导滤波器的相关原理我们下次再开新的章节阐述。
主函数内调用滤波器即可,效果如文首所示。
int main()
{
Mat resultMat;
Mat vSrcImage[3], vResultImage[3];
Mat vResultImage[3];
Mat srcImage = imread("1.jpg");
imshow("源图像", srcImage);
// 对源图像进行通道分离,并对每个分通道进行引导滤波
split(srcImage, vSrcImage);
for (int i = 0; i < 3; i++)
{
Mat tempImage;
vSrcImage[i].convertTo(tempImage, CV_64FC1, 1.0 / 255.0);
Mat cloneImage = tempImage.clone();
Mat resultImage = guidedFilter(tempImage, cloneImage, 5, 0.3);
vResultImage[i] = resultImage;
}
// 将分通道导向滤波后结果合并
merge(vResultImage, 3, resultMat);
imshow("背景虚化特效", resultMat);
waitKey(0);
return 0;
}
一个小小的图像虚化特效,背后牵扯出光学成像的各种原理,构建了计算机视觉模型的地基。正如我们每个人一样,也许你觉得自己很渺小,说不定也是别人的中流砥柱呢!
到此这篇关于OpenCV实现图像背景虚化效果原理详解的文章就介绍到这了,更多相关OpenCV图像背景虚化内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Java OpenCV利用KNN算法实现图像背景移除
目录 实现步骤 示例代码 结果图 实现步骤 1 获取视频 2 设置形态学结构 3 创建 Video.createBackgroundSubtractorKNN() 4 提取模型 BS 5 进行形态学变换 6 膨胀 7 二值化 8 展示结果 示例代码 package com.xu.opencv; import java.util.ArrayList; import java.util.List; import java.util.Objects; import java.util.Optional
-
Opencv图像处理之轮廓外背景颜色改变
本文实例为大家分享了Opencv轮廓外背景颜色改变的具体代码,供大家参考,具体内容如下 自行学习弄得简单代码,使用了图像中的轮廓发现以及提取,再绘制出来,改变轮廓外的像素 首先,头文件,写的比较多,没用的可以自己去除 #include <opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp> #include"opencv2/imgproc/imgproc.hpp" #include <io
-
Java OpenCV图像处理之背景切换
目录 实现步骤 函数详解 示例代码 效果图 实现步骤 1 读取原图片 2 获取原图片的mask 3 获取原图片需要获取的ROI 4 获取新背景的mask 5 融合 3,5 函数详解 示例代码 package com.xu.opencv; import org.opencv.core.Core; import org.opencv.core.Mat; import org.opencv.core.Scalar; import org.opencv.highgui.HighGui; import o
-
Java OpenCV图像处理之背景消除
目录 实现步骤 主要代码 效果图 实现步骤 1.获取视频 2.设置形态学结构 3.创建Video.createBackgroundSubtractorMOG2() 4.提取模型 BS 5.进行形态学变换 6.展示结果 主要代码 package com.xu.opencv; import java.util.ArrayList; import java.util.List; import java.util.Objects; import java.util.Optional; import ja
-
OpenCV实现图像背景虚化效果原理详解
目录 0 写在前面 1 小孔成像 2 光学成像 3 虚化效果 4 代码实战 0 写在前面 相信用过相机的同学都知道虚化特效,这是一种使焦点聚集在拍摄主题上,让背景变得朦胧的效果,例如本文最后实现的背景虚化效果 相机虚化特效背后的原理是什么?和计算机视觉有什么关系?本文带你研究这些问题. 1 小孔成像 小学我们就知道,没有光就不存在图像,为了产生图像,场景必须有一个或多个.直接或间接的光源. 如图所示,光照主要分为三类: 散射 直接光照 漫反射 在获得光源后,将产生从物体到检测平面的光线. 由于从
-
Python OpenCV对图像进行模糊处理详解流程
其实我们平时在深度学习中所说的卷积操作,在 opencv 中也可以进行,或者说是类似操作.那么它是什么操作呢?它就是图像的模糊(滤波)处理. 均值滤波 使用 opencv 中的cv2.blur(src, ksize)函数.其参数说明是: src: 原图像 ksize: 模糊核大小 原理:它只取内核区域下所有像素的平均值并替换中心元素.3x3 标准化的盒式过滤器如下所示: 特征:核中区域贡献率相同. 作用:对于椒盐噪声的滤除效果比较好. # -*-coding:utf-8-*- ""&q
-
-
Python-OpenCV教程之图像的位运算详解
1.按位取反bitwise_not() 按位取反就是将数值根据每个bit位1变0,0变1,比如0xf0按位取反就变成了0x0f,如果是uint8类型的数据,取反前后的数据相加结果为0xff(255).下面的例子将lena.jpg和opencv-logo.png分别按位取反: import cv2 print('cv2.__version__:',cv2.__version__) img1 = cv2.imread('..\\lena.jpg') img2 = cv2.imread('..\\op
-
C++ OpenCV单峰三角阈值法Thresh_Unimodal详解
目录 需求说明 具体流程 功能函数 C++测试代码 测试效果 需求说明 在对图像进行处理时,经常会有这类需求:想通过阈值对图像进行二值化分割,以提取自己感兴趣的区域,常见的阈值分割方法有常数分割.最大类间方差法.双峰分割.三角法等等,不同的场景应用不同的阈值方法. 今天要讲的方法,适合当图像的直方图具有明显单峰特征时使用,结合了三角法的原理而设计,相比较OpenCV自带的三角法,好处是可以根据自身需求合理修改函数:如果用OpenCV库的函数,只有一个接口,若不能达到较理想的应用效果,就束手无策了
-
Python图像运算之图像阈值化处理详解
目录 一.图像阈值化 二.固定阈值化处理 1.二进制阈值化 2.反二进制阈值化 3.截断阈值化 4.阈值化为0 5.反阈值化为0 三.自适应阈值化处理 四.总结 一.图像阈值化 图像阈值化(Binarization)旨在剔除掉图像中一些低于或高于一定值的像素,从而提取图像中的物体,将图像的背景和噪声区分开来. 灰度化处理后的图像中,每个像素都只有一个灰度值,其大小表示明暗程度.阈值化处理可以将图像中的像素划分为两类颜色,常见的阈值化算法如公式(1)所示: 当某个像素点的灰度Gray(i,j)小于
-
OpenCV实现图像去噪算法的步骤详解
目录 一.函数参考 1.Primal-dual算法 2.非局部均值去噪算法 三.OpenCV源码 1.源码路径 2.源码代码 四.效果图像示例 一.函数参考 1.Primal-dual算法 Primal-dual algorithm是一种用于解决特殊类型的变分问题的算法(即找到一个函数来最小化一些泛函). 特别是由于图像去噪可以看作是变分问题,因此可以使用原始对偶算法进行去噪,这正是该算法所实现的. cv::denoise_TVL1 (const std::vector< Mat > &
-
Python图像处理之边缘检测原理详解
目录 原理 Sobel检测算子 Laplacian算子 算子比较 原理 边缘检测是图像处理和计算机视觉当中的基本问题,边缘检测的目的是标识数字图像中亮度变化明显的点,图像的边缘检测可以大幅度的减少数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性,它们绝大多数可以分为两类:基于搜索和基于零穿越. 基于搜索:通过寻找图像一阶导数中max来检测边界,然后利用计算结果估计边缘的局部方向,通常采用梯度的方向,并在此方向找到局部梯度模的最大值,代表的算法是Sobel算子和Scharr算子.
-
浅谈Python Opencv中gamma变换的使用详解
伽马变换就是用来图像增强,其提升了暗部细节,简单来说就是通过非线性变换,让图像从暴光强度的线性响应变得更接近人眼感受的响应,即将漂白(相机曝光)或过暗(曝光不足)的图片,进行矫正. 伽马变换的基本形式如下: 大于1时,对图像的灰度分布直方图具有拉伸作用(使灰度向高灰度值延展),而小于1时,对图像的灰度分布直方图具有收缩作用(是使灰度向低灰度值方向靠拢). #分道计算每个通道的直方图 img0 = cv2.imread('12.jpg') hist_b = cv2.calcHist([img0],
-
C# 通过反射初探ORM框架的实现原理(详解)
背景: 以前学的Java进行开发,多用到Mybatis,Hiberante等ORM框架,最近需要上手一个C#的项目,由于不是特别难,也不想再去学习C#的ORM框架,所以就想着用反射简单的实现一下ORM框架的内容,简单的增删改查,没有用到多表之间的联系. 反射: Java和C#中的反射大体相同,主要是指程序可以访问,检测和修改它本身状态或行为的一种能力,并能根据自身行为的状态和结果,调整或修改应用所描述行为的状态和相关的语义.我的理解就是可以程序运行时动态的获取对象的属性和方法,并且可以进行与之相