python神经网络ShuffleNetV2模型复现详解
目录
- 什么是ShuffleNetV2
- ShuffleNetV2
- 1、所用模块
- 2、网络整体结构
- 网络实现代码
什么是ShuffleNetV2
据说ShuffleNetV2比Mobilenet还要厉害,我决定好好学一下
这篇是ECCV2018关于轻量级模型的文章。
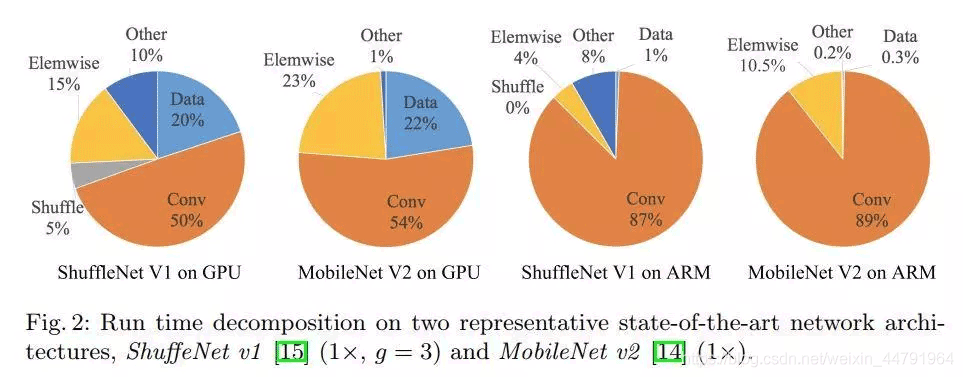
目前大部分的轻量级模型在对比模型速度时用的指标是FLOPs,这个指标主要衡量的就是卷积层的乘法操作。
但是实际运用中会发现,同一个FLOPS的网络运算速度却不同,只用FLOPS去进行衡量的话并不能完全代表模型速度。
通过如下图所示对比,作者发现Elemwise/Data IO等内存读写密集型操作也会极大的影响模型运算速度。
结合理论与实验作者提出了4条实用的指导原则:
1、卷积层的输入和输出特征通道数相等时MAC最小,此时模型速度最快。
2、过量使用组卷积会增加MAC。
3、网络碎片化会降低并行度。
4、不能忽略元素级操作,比如ReLU和Add,虽然它们的FLOPs较小,但是却需要较大的MAC。
ShuffleNetV2
1、所用模块
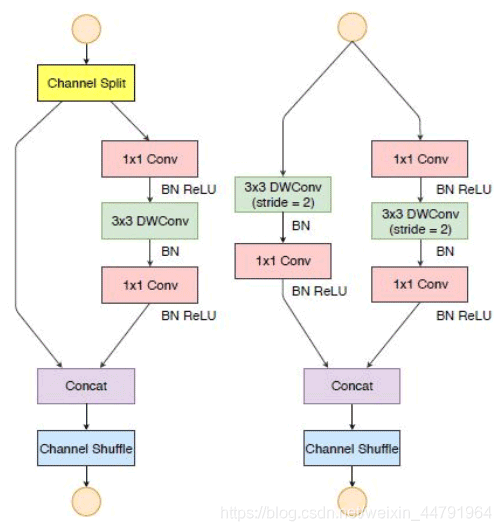
如图所示是ShuffleNetV2所常用的两个模块:
1、当Stride==1的时候,采用左边的模块,由于残差边没有卷积,因此宽高不变,主要用于加深网络层数。
2、当Stride==2的时候,采用右边的模块,由于残差边有卷积,因此宽高可变,主要用于压缩特征层的宽高,进行下采样。
模块实现代码如下:
def channel_split(x, name=''):
# 输入进来的通道数
in_channles = x.shape.as_list()[-1]
ip = in_channles // 2
# 对通道数进行分割
c_hat = Lambda(lambda z: z[:, :, :, 0:ip], name='%s/sp%d_slice' % (name, 0))(x)
c = Lambda(lambda z: z[:, :, :, ip:], name='%s/sp%d_slice' % (name, 1))(x)
return c_hat, c
def channel_shuffle(x):
height, width, channels = x.shape.as_list()[1:]
channels_per_split = channels // 2
# 通道交换
x = K.reshape(x, [-1, height, width, 2, channels_per_split])
x = K.permute_dimensions(x, (0,1,2,4,3))
x = K.reshape(x, [-1, height, width, channels])
return x
def shuffle_unit(inputs, out_channels, bottleneck_ratio, strides=2, stage=1, block=1):
bn_axis = -1
prefix = 'stage{}/block{}'.format(stage, block)
# [116, 232, 464]
bottleneck_channels = int(out_channels * bottleneck_ratio/2)
if strides < 2:
c_hat, c = channel_split(inputs, '{}/spl'.format(prefix))
inputs = c
# [116, 232, 464]
x = Conv2D(bottleneck_channels, kernel_size=(1,1), strides=1, padding='same', name='{}/1x1conv_1'.format(prefix))(inputs)
x = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_1'.format(prefix))(x)
x = Activation('relu', name='{}/relu_1x1conv_1'.format(prefix))(x)
# 深度可分离卷积
x = DepthwiseConv2D(kernel_size=3, strides=strides, padding='same', name='{}/3x3dwconv'.format(prefix))(x)
x = BatchNormalization(axis=bn_axis, name='{}/bn_3x3dwconv'.format(prefix))(x)
# [116, 232, 464]
x = Conv2D(bottleneck_channels, kernel_size=1,strides=1,padding='same', name='{}/1x1conv_2'.format(prefix))(x)
x = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_2'.format(prefix))(x)
x = Activation('relu', name='{}/relu_1x1conv_2'.format(prefix))(x)
# 当strides等于2的时候,残差边需要添加卷积
if strides < 2:
ret = Concatenate(axis=bn_axis, name='{}/concat_1'.format(prefix))([x, c_hat])
else:
s2 = DepthwiseConv2D(kernel_size=3, strides=2, padding='same', name='{}/3x3dwconv_2'.format(prefix))(inputs)
s2 = BatchNormalization(axis=bn_axis, name='{}/bn_3x3dwconv_2'.format(prefix))(s2)
s2 = Conv2D(bottleneck_channels, kernel_size=1,strides=1,padding='same', name='{}/1x1_conv_3'.format(prefix))(s2)
s2 = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_3'.format(prefix))(s2)
s2 = Activation('relu', name='{}/relu_1x1conv_3'.format(prefix))(s2)
ret = Concatenate(axis=bn_axis, name='{}/concat_2'.format(prefix))([x, s2])
ret = Lambda(channel_shuffle, name='{}/channel_shuffle'.format(prefix))(ret)
return ret
def block(x, channel_map, bottleneck_ratio, repeat=1, stage=1):
x = shuffle_unit(x, out_channels=channel_map[stage-1],
strides=2,bottleneck_ratio=bottleneck_ratio,stage=stage,block=1)
for i in range(1, repeat+1):
x = shuffle_unit(x, out_channels=channel_map[stage-1],strides=1,
bottleneck_ratio=bottleneck_ratio,stage=stage, block=(1+i))
return x
2、网络整体结构
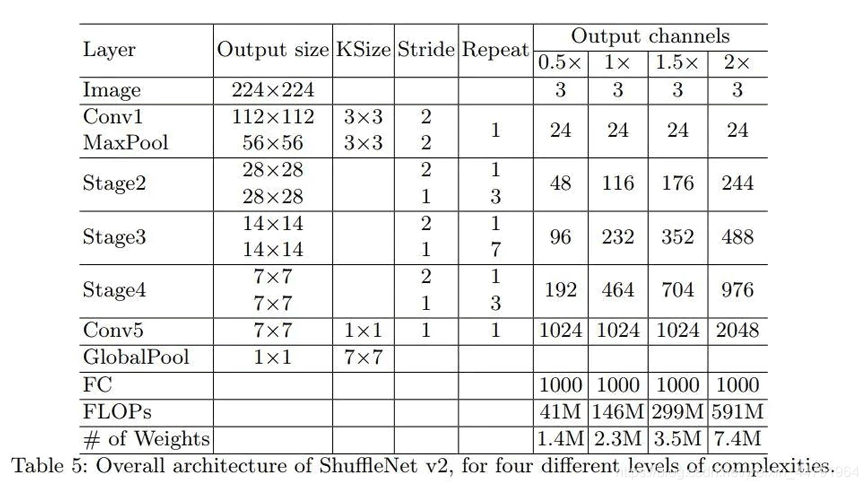
网络整体结构如图所示:
1、当输入进来的图片为224,224,3的时候,会经过一次卷积压缩+一次最大池化,此时网络的shape由224,224,3->112,112,24->56,56,24。
2、经过一次右边的ShuffleNet模块后进行三次左边的ShuffleNet模块。此时网络的shape由56,56,24->28,28,116。
3、经过一次右边的ShuffleNet模块后进行七次左边的ShuffleNet模块。此时网络的shape由28,28,116->14,14,232。
4、经过一次右边的ShuffleNet模块后进行三次左边的ShuffleNet模块。此时网络的shape由14,14,232->7,7,464。
5、卷积到1024,此时网络的shape由7,7,464->7,7,1024。
6、全局池化后,进行全连接,用于预测。
网络实现代码
ShuffleNetV2一共有4个scale,分别对应不同大小的ShuffleNetV2。
import numpy as np
from keras.utils import plot_model
from keras.layers import Input, Conv2D, MaxPool2D
from keras.layers import Activation, Add, Concatenate, Conv2D
from keras.layers import GlobalAveragePooling2D, Dense
from keras.layers import MaxPool2D,AveragePooling2D, BatchNormalization, Lambda, DepthwiseConv2D
from keras.models import Model
import keras.backend as K
import numpy as np
def channel_split(x, name=''):
# 输入进来的通道数
in_channles = x.shape.as_list()[-1]
ip = in_channles // 2
# 对通道数进行分割
c_hat = Lambda(lambda z: z[:, :, :, 0:ip], name='%s/sp%d_slice' % (name, 0))(x)
c = Lambda(lambda z: z[:, :, :, ip:], name='%s/sp%d_slice' % (name, 1))(x)
return c_hat, c
def channel_shuffle(x):
height, width, channels = x.shape.as_list()[1:]
channels_per_split = channels // 2
# 通道交换
x = K.reshape(x, [-1, height, width, 2, channels_per_split])
x = K.permute_dimensions(x, (0,1,2,4,3))
x = K.reshape(x, [-1, height, width, channels])
return x
def shuffle_unit(inputs, out_channels, bottleneck_ratio, strides=2, stage=1, block=1):
bn_axis = -1
prefix = 'stage{}/block{}'.format(stage, block)
# [116, 232, 464]
bottleneck_channels = int(out_channels * bottleneck_ratio/2)
if strides < 2:
c_hat, c = channel_split(inputs, '{}/spl'.format(prefix))
inputs = c
# [116, 232, 464]
x = Conv2D(bottleneck_channels, kernel_size=(1,1), strides=1, padding='same', name='{}/1x1conv_1'.format(prefix))(inputs)
x = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_1'.format(prefix))(x)
x = Activation('relu', name='{}/relu_1x1conv_1'.format(prefix))(x)
# 深度可分离卷积
x = DepthwiseConv2D(kernel_size=3, strides=strides, padding='same', name='{}/3x3dwconv'.format(prefix))(x)
x = BatchNormalization(axis=bn_axis, name='{}/bn_3x3dwconv'.format(prefix))(x)
# [116, 232, 464]
x = Conv2D(bottleneck_channels, kernel_size=1,strides=1,padding='same', name='{}/1x1conv_2'.format(prefix))(x)
x = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_2'.format(prefix))(x)
x = Activation('relu', name='{}/relu_1x1conv_2'.format(prefix))(x)
# 当strides等于2的时候,残差边需要添加卷积
if strides < 2:
ret = Concatenate(axis=bn_axis, name='{}/concat_1'.format(prefix))([x, c_hat])
else:
s2 = DepthwiseConv2D(kernel_size=3, strides=2, padding='same', name='{}/3x3dwconv_2'.format(prefix))(inputs)
s2 = BatchNormalization(axis=bn_axis, name='{}/bn_3x3dwconv_2'.format(prefix))(s2)
s2 = Conv2D(bottleneck_channels, kernel_size=1,strides=1,padding='same', name='{}/1x1_conv_3'.format(prefix))(s2)
s2 = BatchNormalization(axis=bn_axis, name='{}/bn_1x1conv_3'.format(prefix))(s2)
s2 = Activation('relu', name='{}/relu_1x1conv_3'.format(prefix))(s2)
ret = Concatenate(axis=bn_axis, name='{}/concat_2'.format(prefix))([x, s2])
ret = Lambda(channel_shuffle, name='{}/channel_shuffle'.format(prefix))(ret)
return ret
def block(x, channel_map, bottleneck_ratio, repeat=1, stage=1):
x = shuffle_unit(x, out_channels=channel_map[stage-1],
strides=2,bottleneck_ratio=bottleneck_ratio,stage=stage,block=1)
for i in range(1, repeat+1):
x = shuffle_unit(x, out_channels=channel_map[stage-1],strides=1,
bottleneck_ratio=bottleneck_ratio,stage=stage, block=(1+i))
return x
def ShuffleNetV2(input_tensor=None,
pooling='max',
input_shape=(224,224,3),
num_shuffle_units=[3,7,3],
scale_factor=1,
bottleneck_ratio=1,
classes=1000):
name = 'ShuffleNetV2_{}_{}_{}'.format(scale_factor, bottleneck_ratio, "".join([str(x) for x in num_shuffle_units]))
out_dim_stage_two = {0.5:48, 1:116, 1.5:176, 2:244}
out_channels_in_stage = np.array([1,1,2,4])
out_channels_in_stage *= out_dim_stage_two[scale_factor] # calculate output channels for each stage
out_channels_in_stage[0] = 24 # first stage has always 24 output channels
out_channels_in_stage = out_channels_in_stage.astype(int)
img_input = Input(shape=input_shape)
x = Conv2D(filters=out_channels_in_stage[0], kernel_size=(3, 3), padding='same', use_bias=False, strides=(2, 2),
activation='relu', name='conv1')(img_input)
x = MaxPool2D(pool_size=(3, 3), strides=(2, 2), padding='same', name='maxpool1')(x)
for stage in range(len(num_shuffle_units)):
repeat = num_shuffle_units[stage]
x = block(x, out_channels_in_stage,
repeat=repeat,
bottleneck_ratio=bottleneck_ratio,
stage=stage + 2)
if scale_factor!=2:
x = Conv2D(1024, kernel_size=1, padding='same', strides=1, name='1x1conv5_out', activation='relu')(x)
else:
x = Conv2D(2048, kernel_size=1, padding='same', strides=1, name='1x1conv5_out', activation='relu')(x)
x = GlobalAveragePooling2D(name='global_avg_pool')(x)
x = Dense(classes, name='fc')(x)
x = Activation('softmax', name='softmax')(x)
inputs = img_input
model = Model(inputs, x, name=name)
return model
if __name__ == '__main__':
import os
os.environ['CUDA_VISIBLE_DEVICES'] = ''
model = ShuffleNetV2(input_shape=(224, 224, 3),scale_factor=1)
model.summary()
以上就是python神经网络ShuffleNetV2模型复现详解的详细内容,更多关于ShuffleNetV2模型复现的资料请关注我们其它相关文章!
相关推荐
-

python神经网络MobileNetV2模型的复现详解
目录 什么是MobileNetV2模型 MobileNetV2网络部分实现代码 图片预测 什么是MobileNetV2模型 MobileNet它哥MobileNetV2也是很不错的呢 MobileNet模型是Google针对手机等嵌入式设备提出的一种轻量级的深层神经网络,其使用的核心思想便是depthwise separable convolution. MobileNetV2是MobileNet的升级版,它具有两个特征点: 1.Inverted residuals,在ResNet50里我们认识
-
python神经网络MobileNetV3 small模型的复现详解
目录 什么是MobileNetV3 large与small的区别 MobileNetV3(small)的网络结构 1.MobileNetV3(small)的整体结构 2.MobileNetV3特有的bneck结构 网络实现代码 什么是MobileNetV3 不知道咋地,就是突然想把small也一起写了. 最新的MobileNetV3的被写在了论文<Searching for MobileNetV3>中. 它是mobilnet的最新版,据说效果还是很好的. 作为一种轻量级网络,它的参数量还是一如
-
python神经网络Densenet模型复现详解
目录 什么是Densenet Densenet 1.Densenet的整体结构 2.DenseBlock 3.Transition Layer 网络实现代码 什么是Densenet 据说Densenet比Resnet还要厉害,我决定好好学一下. ResNet模型的出现使得深度学习神经网络可以变得更深,进而实现了更高的准确度. ResNet模型的核心是通过建立前面层与后面层之间的短路连接(shortcuts),这有助于训练过程中梯度的反向传播,从而能训练出更深的CNN网络. DenseNet模型,
-
python神经网络MobileNetV3 large模型的复现详解
目录 神经网络学习小记录38——MobileNetV3(large)模型的复现详解 学习前言什么是MobileNetV3代码下载MobileNetV3(large)的网络结构1.MobileNetV3(large)的整体结构2.MobileNetV3特有的bneck结构 网络实现代码 学习前言 为了防止某位我的粉丝寒假没有办法正常工作,我赶紧看了看MobilenetV3. 什么是MobileNetV3 最新的MobileNetV3的被写在了论文<Searching for MobileNetV3
-
Python深度学习之使用Pytorch搭建ShuffleNetv2
一.model.py 1.1 Channel Shuffle def channel_shuffle(x: Tensor, groups: int) -> Tensor: batch_size, num_channels, height, width = x.size() channels_per_group = num_channels // groups # reshape # [batch_size, num_channels, height, width] -> [batch_size
-
python神经网络ResNet50模型的复现详解
目录 什么是残差网络 什么是ResNet50模型 ResNet50网络部分实现代码 图片预测 什么是残差网络 最近看yolo3里面讲到了残差网络,对这个网络结构很感兴趣,于是了解到这个网络结构最初的使用是在ResNet网络里. Residual net(残差网络): 将靠前若干层的某一层数据输出直接跳过多层引入到后面数据层的输入部分. 意味着后面的特征层的内容会有一部分由其前面的某一层线性贡献. 其结构如下: 深度残差网络的设计是为了克服由于网络深度加深而产生的学习效率变低与准确率无法有效提升的
-
python神经网络Inception ResnetV2模型复现详解
目录 什么是Inception ResnetV2 Inception-ResNetV2的网络结构 1.Stem的结构: 2.Inception-resnet-A的结构: 3.Inception-resnet-B的结构: 4.Inception-resnet-C的结构: 全部代码 什么是Inception ResnetV2 Inception ResnetV2是Inception ResnetV1的一个加强版,两者的结构差距不大,如果大家想了解Inception ResnetV1可以看一下我的另一
-
python神经网络ShuffleNetV2模型复现详解
目录 什么是ShuffleNetV2 ShuffleNetV2 1.所用模块 2.网络整体结构 网络实现代码 什么是ShuffleNetV2 据说ShuffleNetV2比Mobilenet还要厉害,我决定好好学一下 这篇是ECCV2018关于轻量级模型的文章. 目前大部分的轻量级模型在对比模型速度时用的指标是FLOPs,这个指标主要衡量的就是卷积层的乘法操作. 但是实际运用中会发现,同一个FLOPS的网络运算速度却不同,只用FLOPS去进行衡量的话并不能完全代表模型速度. 通过如下图所示对比,
-
python神经网络Xception模型复现详解
目录 什么是Xception模型 Xception网络部分实现代码 图片预测 Xception是继Inception后提出的对Inception v3的另一种改进,学一学总是好的 什么是Xception模型 Xception是谷歌公司继Inception后,提出的InceptionV3的一种改进模型,其改进的主要内容为采用depthwise separable convolution来替换原来Inception v3中的多尺寸卷积核特征响应操作. 在讲Xception模型之前,首先要讲一下什么是
-
python神经网络InceptionV3模型复现详解
目录 神经网络学习小记录21——InceptionV3模型的复现详解 学习前言什么是InceptionV3模型InceptionV3网络部分实现代码图片预测 学习前言 Inception系列的结构和其它的前向神经网络的结构不太一样,每一层的内容不是直直向下的,而是分了很多的块. 什么是InceptionV3模型 InceptionV3模型是谷歌Inception系列里面的第三代模型,其模型结构与InceptionV2模型放在了同一篇论文里,其实二者模型结构差距不大,相比于其它神经网络模型,Inc
-
python神经网络MobileNet模型的复现详解
目录 什么是MobileNet模型 MobileNet网络部分实现代码 图片预测 什么是MobileNet模型 MobileNet是一种轻量级网络,相比于其它结构网络,它不一定是最准的,但是它真的很轻 MobileNet模型是Google针对手机等嵌入式设备提出的一种轻量级的深层神经网络,其使用的核心思想便是depthwise separable convolution. 对于一个卷积点而言: 假设有一个3×3大小的卷积层,其输入通道为16.输出通道为32.具体为,32个3×3大小的卷积核会遍历