pytorch教程网络和损失函数的可视化代码示例
目录
- 1.效果
- 2.环境
- 3.用到的代码
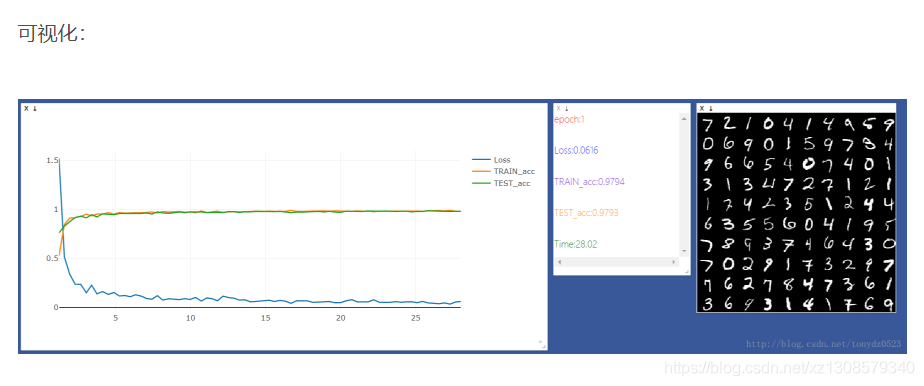
1.效果
2.环境
1.pytorch
2.visdom
3.python3.5
3.用到的代码
# coding:utf8
import torch
from torch import nn, optim # nn 神经网络模块 optim优化函数模块
from torch.utils.data import DataLoader
from torch.autograd import Variable
from torchvision import transforms, datasets
from visdom import Visdom # 可视化处理模块
import time
import numpy as np
# 可视化app
viz = Visdom()
# 超参数
BATCH_SIZE = 40
LR = 1e-3
EPOCH = 2
# 判断是否使用gpu
USE_GPU = True
if USE_GPU:
gpu_status = torch.cuda.is_available()
else:
gpu_status = False
transform=transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.1307,), (0.3081,))])
# 数据引入
train_dataset = datasets.MNIST('../data', True, transform, download=False)
test_dataset = datasets.MNIST('../data', False, transform)
train_loader = DataLoader(train_dataset, BATCH_SIZE, True)
# 为加快测试,把测试数据从10000缩小到2000
test_data = torch.unsqueeze(test_dataset.test_data, 1)[:1500]
test_label = test_dataset.test_labels[:1500]
# visdom可视化部分数据
viz.images(test_data[:100], nrow=10)
#viz.images(test_data[:100], nrow=10)
# 为防止可视化视窗重叠现象,停顿0.5秒
time.sleep(0.5)
if gpu_status:
test_data = test_data.cuda()
test_data = Variable(test_data, volatile=True).float()
# 创建线图可视化窗口
line = viz.line(np.arange(10))
# 创建cnn神经网络
class CNN(nn.Module):
def __init__(self, in_dim, n_class):
super(CNN, self).__init__()
self.conv = nn.Sequential(
# channel 为信息高度 padding为图片留白 kernel_size 扫描模块size(5x5)
nn.Conv2d(in_channels=in_dim, out_channels=16,kernel_size=5,stride=1, padding=2),
nn.ReLU(),
# 平面缩减 28x28 >> 14*14
nn.MaxPool2d(kernel_size=2),
nn.Conv2d(16, 32, 3, 1, 1),
nn.ReLU(),
# 14x14 >> 7x7
nn.MaxPool2d(2)
)
self.fc = nn.Sequential(
nn.Linear(32*7*7, 120),
nn.Linear(120, n_class)
)
def forward(self, x):
out = self.conv(x)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
net = CNN(1,10)
if gpu_status :
net = net.cuda()
#print("#"*26, "使用gpu", "#"*26)
else:
#print("#" * 26, "使用cpu", "#" * 26)
pass
# loss、optimizer 函数设置
loss_f = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=LR)
# 起始时间设置
start_time = time.time()
# 可视化所需数据点
time_p, tr_acc, ts_acc, loss_p = [], [], [], []
# 创建可视化数据视窗
text = viz.text("<h1>convolution Nueral Network</h1>")
for epoch in range(EPOCH):
# 由于分批次学习,输出loss为一批平均,需要累积or平均每个batch的loss,acc
sum_loss, sum_acc, sum_step = 0., 0., 0.
for i, (tx, ty) in enumerate(train_loader, 1):
if gpu_status:
tx, ty = tx.cuda(), ty.cuda()
tx = Variable(tx)
ty = Variable(ty)
out = net(tx)
loss = loss_f(out, ty)
#print(tx.size())
#print(ty.size())
#print(out.size())
sum_loss += loss.item()*len(ty)
#print(sum_loss)
pred_tr = torch.max(out,1)[1]
sum_acc += sum(pred_tr==ty).item()
sum_step += ty.size(0)
# 学习反馈
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 每40个batch可视化一下数据
if i % 40 == 0:
if gpu_status:
test_data = test_data.cuda()
test_out = net(test_data)
print(test_out.size())
# 如果用gpu运行out数据为cuda格式需要.cpu()转化为cpu数据 在进行比较
pred_ts = torch.max(test_out, 1)[1].cpu().data.squeeze()
print(pred_ts.size())
rightnum = pred_ts.eq(test_label.view_as(pred_ts)).sum().item()
#rightnum =sum(pred_tr==ty).item()
# sum_acc += sum(pred_tr==ty).item()
acc = rightnum/float(test_label.size(0))
print("epoch: [{}/{}] | Loss: {:.4f} | TR_acc: {:.4f} | TS_acc: {:.4f} | Time: {:.1f}".format(epoch+1, EPOCH,
sum_loss/(sum_step), sum_acc/(sum_step), acc, time.time()-start_time))
# 可视化部分
time_p.append(time.time()-start_time)
tr_acc.append(sum_acc/sum_step)
ts_acc.append(acc)
loss_p.append(sum_loss/sum_step)
viz.line(X=np.column_stack((np.array(time_p), np.array(time_p), np.array(time_p))),
Y=np.column_stack((np.array(loss_p), np.array(tr_acc), np.array(ts_acc))),
win=line,
opts=dict(legend=["Loss", "TRAIN_acc", "TEST_acc"]))
# visdom text 支持html语句
viz.text("<p style='color:red'>epoch:{}</p><br><p style='color:blue'>Loss:{:.4f}</p><br>"
"<p style='color:BlueViolet'>TRAIN_acc:{:.4f}</p><br><p style='color:orange'>TEST_acc:{:.4f}</p><br>"
"<p style='color:green'>Time:{:.2f}</p>".format(epoch, sum_loss/sum_step, sum_acc/sum_step, acc,
time.time()-start_time),
win=text)
sum_loss, sum_acc, sum_step = 0., 0., 0.
以上就是pytorch教程网络和损失函数的可视化代码示例的详细内容,更多关于pytorch教程网络和损失函数的可视化的资料请关注我们其它相关文章!
相关推荐
-
Pytorch十九种损失函数的使用详解
损失函数通过torch.nn包实现, 1 基本用法 criterion = LossCriterion() #构造函数有自己的参数 loss = criterion(x, y) #调用标准时也有参数 2 损失函数 2-1 L1范数损失 L1Loss 计算 output 和 target 之差的绝对值. torch.nn.L1Loss(reduction='mean') 参数: reduction-三个值,none: 不使用约简:mean:返回loss和的平均值: sum:返回loss的和.默认:
-

Pytorch可视化的几种实现方法
一,利用 tensorboardX 可视化网络结构 参考 https://github.com/lanpa/tensorboardX 支持scalar, image, figure, histogram, audio, text, graph, onnx_graph, embedding, pr_curve and video summaries. 例子要求tensorboardX>=1.2 and pytorch>=0.4 安装 pip install tensorboardX 或 pip
-
使用pytorch实现可视化中间层的结果
摘要 一直比较想知道图片经过卷积之后中间层的结果,于是使用pytorch写了一个脚本查看,先看效果 这是原图,随便从网上下载的一张大概224*224大小的图片,如下 网络介绍 我们使用的VGG16,包含RULE层总共有30层可以可视化的结果,我们把这30层分别保存在30个文件夹中,每个文件中根据特征的大小保存了64~128张图片 结果如下: 原图大小为224224,经过第一层后大小为64224*224,下面是第一层可视化的结果,总共有64张这样的图片: 下面看看第六层的结果 这层的输出大小是 1
-
pytorch使用tensorboardX进行loss可视化实例
最近pytorch出了visdom,也没有怎么去研究它,主要是觉得tensorboardX已经够用,而且用起来也十分的简单 pip install tensorboardX 然后在代码里导入 from tensorboardX import SummaryWriter 然后声明一下自己将loss写到哪个路径下面 writer = SummaryWriter('./log') 然后就可以愉快的写loss到你得这个writer了 niter = epoch * len(train_loader) +
-
pytorch教程网络和损失函数的可视化代码示例
目录 1.效果 2.环境 3.用到的代码 1.效果 2.环境 1.pytorch 2.visdom 3.python3.5 3.用到的代码 # coding:utf8 import torch from torch import nn, optim # nn 神经网络模块 optim优化函数模块 from torch.utils.data import DataLoader from torch.autograd import Variable from torchvision import t
-
python教程网络爬虫及数据可视化原理解析
目录 1 项目背景 1.1Python的优势 1.2网络爬虫 1.3数据可视化 1.4Python环境介绍 1.4.1简介 1.4.2特点 1.5扩展库介绍 1.5.1安装模块 1.5.2主要模块介绍 2需求分析 2.1 网络爬虫需求 2.2 数据可视化需求 3总体设计 3.1 网页分析 3.2 数据可视化设计 4方案实施 4.1网络爬虫代码 4.2 数据可视化代码 5 效果展示 5.1 网络爬虫 5.1.1 爬取近五年主要城市数据 5.1.2 爬取2019年各省GDP 5.1.3 爬取豆瓣电影
-
pytorch教程之网络的构建流程笔记
目录 构建网络 定义一个网络 loss Function Backprop 更新权值 参考网址 构建网络 我们可以通过torch.nn包来构建网络,现在你已经看过了autograd,nn在autograd的基础上定义模型和求微分.一个nn.Module包括很多层,forward方法返回output. 一个典型的训练过程包括这么几步: 1.定义一个网络结构包含一些可训练的额参数 2.为数据集制定输入iterata 3.通过网络计算Output 4.计算loss 5.反向传播计算梯度 6.更新权值
-
pytorch教程实现mnist手写数字识别代码示例
目录 1.构建网络 2.编写训练代码 3.编写测试代码 4.指导程序train和test 5.完整代码 1.构建网络 nn.Moudle是pytorch官方指定的编写Net模块,在init函数中添加需要使用的层,在foeword中定义网络流向. 下面详细解释各层: conv1层:输入channel = 1 ,输出chanael = 10,滤波器5*5 maxpooling = 2*2 conv2层:输入channel = 10 ,输出chanael = 20,滤波器5*5, dropout ma
-
关于pytorch中网络loss传播和参数更新的理解
相比于2018年,在ICLR2019提交论文中,提及不同框架的论文数量发生了极大变化,网友发现,提及tensorflow的论文数量从2018年的228篇略微提升到了266篇,keras从42提升到56,但是pytorch的数量从87篇提升到了252篇. TensorFlow: 228--->266 Keras: 42--->56 Pytorch: 87--->252 在使用pytorch中,自己有一些思考,如下: 1. loss计算和反向传播 import torch.nn as nn
-
pytorch中常用的损失函数用法说明
1. pytorch中常用的损失函数列举 pytorch中的nn模块提供了很多可以直接使用的loss函数, 比如MSELoss(), CrossEntropyLoss(), NLLLoss() 等 官方链接: https://pytorch.org/docs/stable/_modules/torch/nn/modules/loss.html pytorch中常用的损失函数 损失函数 名称 适用场景 torch.nn.MSELoss() 均方误差损失 回归 torch.nn.L1Loss() 平
-
pytorch 权重weight 与 梯度grad 可视化操作
pytorch 权重weight 与 梯度grad 可视化 查看特定layer的权重以及相应的梯度信息 打印模型 观察到model下面有module的key,module下面有features的key, features下面有(0)的key,这样就可以直接打印出weight了 在pdb debug界面输入p model.module.features[0].weight,就可以看到weight,输入 p model.module.features[0].weight.grad 就可以查看梯度信息
-
pytorch教程resnet.py的实现文件源码分析
目录 调用pytorch内置的模型的方法 解读模型源码Resnet.py 包含的库文件 该库定义了6种Resnet的网络结构 每种网络都有训练好的可以直接用的.pth参数文件 Resnet中大多使用3*3的卷积定义如下 如何定义不同大小的Resnet网络 定义Resnet18 定义Resnet34 Resnet类 网络的forward过程 残差Block连接是如何实现的 调用pytorch内置的模型的方法 import torchvision model = torchvision.models
-
将pytorch的网络等转移到cuda
神经网络一般用GPU来跑,我们的神经网络框架一般也都安装的GPU版本,本文就简单记录一下GPU使用的编写. GPU的设置不在model,而是在Train的初始化上. 第一步是查看是否可以使用GPU self.GPU_IN_USE = torch.cuda.is_available() 就是返回这个可不可以用GPU的函数,当你的pytorch是cpu版本的时候,他就会返回False. 然后是: self.device = torch.device('cuda' if self.GPU_IN_USE
-
人工智能学习PyTorch教程之层和块
对于多层感知机而言,整个模型做的事情就是接收输入生成输出.但是并不是所有的多层神经网络都一样,所以为了实现复杂的神经网络就需要神经网络块,块可以描述单个层.由多个层组成的组件或整个模型本身.使用块进行抽象的一个好处是可以将一些块组合成更大的组件. 从编程的角度来看,块由类(class)表示.它的任何子类都必须定义一个将其输入转换为输出的正向传播函数,并且必须存储任何必需的参数.注意,有些块不需要任何参数.最后,为了计算梯度,块必须具有反向传播函数.幸运的是,在定义我们自己的块时,由于autogr