C/C++实现图形学扫描线填充算法
在上图形学课的时候,学习了扫描线填充算法。不过在完成实验的时候在真正理解了该算法,在此记录一下,如果有表达上的错误,欢迎指正!
扫描线填充算法通过在与图形相交的第(1,2)、(3,4)... 边之间划线不断不断填充图形。因此,在扫描时就需要确定什么时候与图形的某条边相交、划线的时候x的范围是多少以及划线时是从哪个交点画至另一个交点。
结构体如下所示:
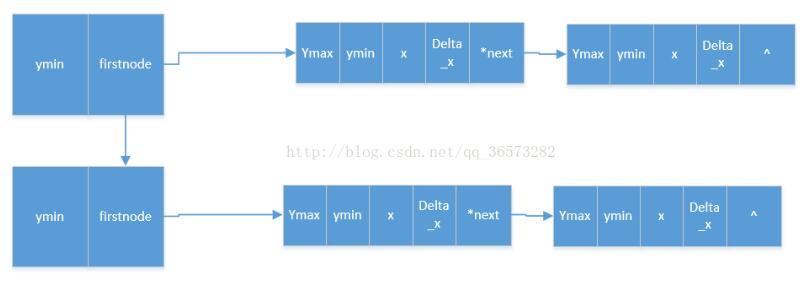
为了节省存储的空间,边表项也使用链表结构,将图形中ymin值相同的边链接在同一个边表项后,这样在扫描的时候方便添加。
具体的流程如下:
一、初始化活动边表
1. 统计并初始化表项
2. 将每条边分别链接在表项后
二、 绘制与填充
1. 取出当前与扫描线相交的边
① 取出ymin 大于当前扫描线的y值的边
② 删除ymax 小于等于当前扫描线的边(①②过程可以排除掉与扫描线平行的边)
2. 将取出的边按照左右顺序排序(根据边的最低点的坐标与直线的斜率判断)
3. 划线并直接在原结构上修改边的x值(因为是在一个函数内,修改保存的值仅限于函数内,并不影响main函数中的值)
具体的代码如下所示,使用的库是EasyX(可以在http://www.easyx.cn/下载):
#include "graphics.h"
#include "stdio.h"
#include "conio.h"
#include <stdlib.h>
#include <math.h>
#include <cmath>
#include <iostream>
using namespace std;
#define MAX_VOL 20
//多边形的边的数据结构
typedef struct Edge
{
int y_max, y_min; //该有向边的y坐标的最大值与最小值
double x, deltax; //该有向边的x的最小值以及x的变化的量(1/斜率)
struct Edge* next; //指向下一条边的指针
}Edge;
//活动边表表项
typedef struct TableItem
{
int curr_y; //该表项的y坐标值 ymin
Edge *firstNode; //该表项的首个节点,如果没有,NULL
struct TableItem *next; //指向下一个活动边表表项的指针
}TableItem;
//活动边表结构体
typedef struct Table
{
TableItem *itemHeader; //活动边表的表项header
int item_count; //活动边表表项的个数
}ET;
class Point
{
private:
int x1, x2, y1, y2;
public:
Point(int x1, int y1, int x2, int y2)
{
this->x1 = x1;
this->x2 = x2;
this->y1 = y1;
this->y2 = y2;
}
//返回两个点之中的ymax
int YMax()
{
return (y1 > y2 ? y1 : y2);
}
//返回ymin
int YMin()
{
return (y1 < y2 ? y1 : y2);
}
//返回ymin 端点的x 值
int x()
{
return (y1 < y2 ? x1 : x2);
}
//返回直线的斜率,按照传入的参数的顺序
double KOfLine()
{
return ((y2 - y1)*1.0 / (x2 - x1));
}
};
class Solution
{
public:
//根据多边形初始化活动表
//参数 T 活动边表
//参数edges 用于初始化的边数组
//参数 edge_num 用于初始化的边的个数
void Init(ET &T, Edge *edges, int edge_num)
{
//初始化活动边表结构体
T.item_count = 0;
T.itemHeader = NULL;
int ymins[20]; //存储ymin ,决定活动边表的个数以及表项的内容
T.item_count = TableItemCount(edges, edge_num, ymins);
T.itemHeader = (TableItem*)malloc(sizeof(TableItem));
T.itemHeader->curr_y = ymins[0];
T.itemHeader->firstNode = NULL;
T.itemHeader->next = NULL;
TableItem *p = T.itemHeader; //指向头结点
for (int i = 1; i<T.item_count; ++i)
{
//依次创建活动边表的各个表项,并连接在一起
TableItem *e = (TableItem*)malloc(sizeof(TableItem));
e->curr_y = ymins[i];
e->firstNode = NULL;
e->next = NULL;
p->next = e;
p = e;
}
//按照用于初始化的边数组初始化活动边表
p = T.itemHeader;
for (int j = 0; j < edge_num; ++j) {
this->AppendNode(T, edges[j].y_min, edges[j]);
}
//方法结束
////////测试区////////////
//cout << "遍历表项。。。。。" << endl;
//p = T.itemHeader;
//while (p != NULL) {
// cout << "当前表项y : " << p->curr_y << endl;
// Edge *ele = p->firstNode;
// while (ele != NULL) {
// cout << "表项中的边: x = " << ele->x << " y_min = " << ele->y_min << " y_max = " << ele->y_max <<
// "deltax = " << ele->deltax << endl;
// ele = ele->next;
// }
// p = p->next;
//}
////////测试删除结点////////
//p = T.itemHeader;
//int yMax = 0;
//while (yMax < 24) {
// p = T.itemHeader;
// cout << "-------------------------------" << endl;
// cout << "当前y max :" << yMax << endl;
// this->DeleteNode(T, yMax);
// while (p != NULL) {
// cout << "当前表项y : " << p->curr_y << endl;
// Edge *ele = p->firstNode;
// while (ele != NULL) {
// cout << "表项中的边: x = " << ele->x << " y_min = " << ele->y_min << " y_max = " << ele->y_max <<
// "deltax = " << ele->deltax << endl;
// ele = ele->next;
// }
// p = p->next;
// }
// yMax++;
//}
/////////////////////////
}
//用于根据边数组计算需要多少个表项
//表项的个数取决于边的ymin的个数
//返回值 ymin 数组
//返回 item_num 表项的个数
int TableItemCount(Edge *edges, int edge_num, int* ymins)
{
int count = 0;
for (int i = 0; i<edge_num; ++i)
{
if (!isInArray(ymins, edges[i].y_min, count))
{
ymins[count++] = edges[i].y_min;
}
}
//将ymin 升序排序
for (int j = 0; j<count - 1; ++j)
{
for (int k = j + 1; k<count; ++k)
{
if (ymins[k] < ymins[j])
{
int tmp = ymins[k];
ymins[k] = ymins[j];
ymins[j] = tmp;
}
}
}
return count;
}
//判断一个整数是否在整数数组中
bool isInArray(int *array, int e, int array_length)
{
for (int i = 0; i<array_length; ++i)
{
if (array[i] == e)
{
return true;
}
}
return false;
}
//传入edges数组,初始化,返回Edge 结构体数组
//因为需要是封闭图形,所以,在边数组中,最后的点的坐标设为起始点的坐标,传入的edge_num 不变
Edge* InitEdges(int *edges, int edge_num)
{
Edge *newEdges = (Edge*)malloc(sizeof(Edge)*edge_num);
int j = 0;
for (int i = 0; i<edge_num; ++i)
{
Point point(edges[2 * i], edges[2 * i + 1], edges[2 * (i + 1)], edges[2 * (i + 1) + 1]);
Edge *newEdge = (Edge*)malloc(sizeof(Edge));
newEdge->x = (double)point.x();
newEdge->y_max = point.YMax();
newEdge->y_min = point.YMin();
newEdge->deltax = 1.0 / point.KOfLine(); // 斜率分之一
newEdge->next = NULL;
newEdges[j++] = *(newEdge);
}
return newEdges;
}
//删除所有的小于ymax 的节点
//参数 curr_ymax 当前扫描线的y值
void DeleteNode(ET &T, int curr_ymax)
{
TableItem *p = T.itemHeader; //指向表项的指针
while (p != NULL) {
Edge *item = p->firstNode; //指向表项的邻接链表的指针
Edge *itempre = p->firstNode; //指向前一个边结点的指针
while (item != NULL) {
if (item->y_max <= curr_ymax) { //删除该结点
T.item_count--; //当前活动边表中的边的个数-1
//判断该结点是否是该链表的头结点
if (item == p->firstNode) {
p->firstNode = (Edge*)malloc(sizeof(Edge));
p->firstNode = item->next;
free(item); //释放该结点
item = p->firstNode; //重新指向firstnode结点
itempre = p->firstNode;
}
else {
itempre->next = item->next; //修改前一个结点的next的值
free(item); //删除该指针
item = itempre->next; //继续向后遍历
}
}//if (item->y_max < curr_ymax)
else {
itempre = item;
item = item->next;
}
}//while (item != NULL)
p = p->next;
}//while (p != NULL)
}
//将指定y值的节点添加到该表项, 该方法插入的顺序取决于调用该方法传入参数的顺序
//该方法将新节点插入到对应表项的邻接链表的末尾
void AppendNode(ET &T, int place_y, Edge &e)
{
////////测试区//////////
//cout << "In Append , place_y = " << place_y << " e.ymin = " << e.y_min << endl;
//cout << "item count" << T.item_count << endl;
///////////////////////
TableItem *p = T.itemHeader; //指向活动边表的头结点
//将边e插入到对应的表项
//之后在该表项中按照x的大小确定插入的位置
for (int i = 0; i < T.item_count; ++i) {
if (p->curr_y == e.y_min)
break;
p = p->next;
}
//将边插入到该表项的邻接链表中
Edge *egp = p->firstNode; //egp 指向该表项的首个邻接节点
if (egp == NULL) { //如果该表项还没有节点,直接插入
egp = (Edge*)malloc(sizeof(Edge));
*(egp) = e;
egp->next = NULL;
p->firstNode = egp;
}
else {
Edge *pre = egp;
while (egp != NULL) {
pre = egp;
egp = egp->next;
}
Edge *newedge = (Edge*)malloc(sizeof(Edge));
*(newedge) = e;
pre->next = newedge;
newedge->next = NULL;
}
}
//绘图的方法
void Draw(ET T) {
//首先取出ymin 值小于当前扫描线y 的边
//按照顺序配对
int curr_y = 0, curr_edge_num = 0, curr_gy = graphy(curr_y); //图形坐标的扫描线的y坐标
Edge *currEdges = (Edge*)malloc(sizeof(Edge) * 20); //用于存放指针的数组
//将每条边的记录的x 化为图形上的坐标
TableItem *p = T.itemHeader;
while (p != NULL) {
Edge *q = p->firstNode;
while (q != NULL) {
q->x = graphx(q->x);
q = q->next;
}
p = p->next;
}
for (; curr_y < 30; curr_gy--, curr_y = realy(curr_gy)) {
this->DeleteNode(T, curr_y); //删除当前扫描过的边(ymax 小于 curr_y)
currEdges = this->GetCurrEdges(T, curr_y, curr_edge_num); //获取当前与扫描线相交的边
//对获取到的边进行排序、配对
for (int i = 0; i < curr_edge_num - 1; ++i) {
for (int j = i + 1; j < curr_edge_num; ++j) {
if (this->IsRightTo(currEdges[i], currEdges[j])) {
Edge tmp = currEdges[i];
currEdges[i] = currEdges[j];
currEdges[j] = tmp;
}
}
}
////
// getchar();
// cout << "------------------------------" << endl;
setcolor(BLUE);
for (int j = 0; j < curr_edge_num / 2; ++j) {
///
// cout << "line :" << (int)currEdges[2 * j].x << " , " << curr_y << "----->" << (int)currEdges[2 * j + 1].x << " , " << curr_y <<
// " edge_num = " << curr_edge_num << endl;
line((int)currEdges[2 * j].x, curr_gy, (int)currEdges[2 * j + 1].x, curr_gy);
Edge *curr_edge1 = this->GetThisEdge(T, currEdges[2 * j].x, currEdges[2 * j].y_min,
currEdges[2 * j].y_max); //获取当前边的指针,修改x值,保存修改
curr_edge1->x += curr_edge1->deltax;
Edge *curr_edge2 = this->GetThisEdge(T, currEdges[2 * j + 1].x, currEdges[2 * j + 1].y_min,
currEdges[2 * j + 1].y_max);
curr_edge2->x += curr_edge2->deltax;
//line((int)currEdges[2 * j].x, curr_gy, (int)currEdges[2 * j + 1].x, curr_gy); //在两条直线之间划线
//currEdges[2 * j].x += currEdges[2 * j].deltax;
//currEdges[2 * j + 1].x += currEdges[2 * j + 1].deltax; //更新x 的坐标值
}
//////////测试模拟输出划线///////////////
/*cout << "------------------------------------------" << endl;
cout << "curr_y = " << curr_y << endl;
cout << "当前扫描的边的个数 = " << curr_edge_num << endl;
for (int i = 0; i < curr_edge_num / 2; ++i) {
cout << "draw line bwtwen :" << endl;
cout << "直线1 x = " << currEdges[2 * i].x << " ymin = " << currEdges[2 * i].y_min <<
" ymax = " << currEdges[2 * i].y_max << endl;
cout << "直线2 x = " << currEdges[2 * i + 1].x << " ymin = " << currEdges[2 * i + 1].y_min <<
" ymax = " << currEdges[2 * i + 1].y_max << endl;
}*/
////////////////////////////////////
//在1,2 3,4 ... 边之间划线
//TODO 坐标转换以及划线
}
///////测试区/////////////////
//cout << "-------------------------------------" << endl;
//cout << "当前取出的边。。。。。。。。。。" << endl;
//cout << "curr_edge_num = " << curr_edge_num << endl;
//for (int i = 0; i < curr_edge_num; ++i) {
// cout << "x = " << currEdges[i].x << " y_min = " << currEdges[i].y_min << " y_max = " << currEdges[i].y_max << endl;
//}
////////////////////////////////
}
//返回某个边的指针
//可通过此指针修改原结构体中边的x的值
Edge* GetThisEdge(ET T, double x, int y_min, int y_max) {
TableItem *p = T.itemHeader;
while (p != NULL) {
Edge *q = p->firstNode;
while (q != NULL) {
if ((q->x == x) && (q->y_max == y_max) && (q->y_min == y_min)) {
return q;
}
q = q->next;
}
p = p->next;
}
return NULL;
}
//用于坐标转换的函数
double graphx(double x) {
return x * 10 + 100;
}
double realx(double gx) {
return (gx - 100)*1.0 / 10;
}
int graphy(int y) {
return 400 - y * 10;
}
int realy(int gy) {
return (400 - gy) / 10;
}
//绘制坐标系
void DrawCoordinate(int edges[], int edge_num) {
line(100, 100, 100, 400);
line(100, 400, 400, 400);
outtextxy(85, 95, "y↑");
outtextxy(400, 393, "→x");
for (int i = 0; i < 30; ++i) {
if (i % 2 != 0)
continue;
//TODO 字符转换
outtextxy(i * 10 + 100, 390, "|");
char *text = (char*)malloc(sizeof(char) * 10);
itoa(i,text,10);
outtextxy(i * 10 + 100, 410, text);
free(text);
}
for (int j = 0; j < 30; ++j) {
if (j % 2 != 0)
continue;
outtextxy(100, 400 - j * 10, "_");
char *str = (char*)malloc(sizeof(char)*10);
itoa(j,str,10);
outtextxy(100, 400 - j * 10,str);
free(str);
}
//绘制原多边形
for (int k = 0; k < edge_num; ++k) {
setcolor(YELLOW);
int x1 = 0, x2 = 0, y1 = 0, y2 = 0;
x1 = edges[2 * k] * 10 + 100;
y1 = 400 - edges[2 * k + 1] * 10;
x2 = edges[2 * (k + 1)] * 10 + 100;
y2 = 400 - edges[2 * (k + 1) + 1] * 10;
line(x1, y1, x2, y2);
}
}
//获取当前的涉及的扫描线的边
//即取出当前ymin 小于curr_y的边
//通过参数返回取出的边的个数
Edge* GetCurrEdges(ET T, int curr_y, int &edge_num) {
Edge *currEdges = (Edge*)malloc(sizeof(Edge) * 20); //分配最大容量
int i = 0;
TableItem *p = T.itemHeader;
while (p != NULL) {
Edge *q = p->firstNode;
while (q != NULL) {
if (q->y_min <= curr_y) { //等于号很重要,否则会在图形中出现空白区
currEdges[i++] = *q; //将当前边的值取出(不改变原活动表)
}
q = q->next;
}
p = p->next;
}
edge_num = i; //保存取出的边的个数
return currEdges;
}
//判断edge1 是否在edge2 的右边的方法
bool IsRightTo(Edge edge1, Edge edge2) {
if (edge1.x > edge2.x) //如果edge1最低点的x坐标小于edge2的最低点的x的坐标,则edge1在edge2的右边
return true;
else {
if (edge1.x < edge2.x)
return false;
double x_max1 = (edge1.y_max - (edge1.y_min - 1.0 / edge1.deltax*edge1.x))*edge1.deltax;
double x_max2 = (edge2.y_max - (edge2.y_min - 1.0 / edge2.deltax*edge2.x))*edge2.deltax;
if (x_max1 > x_max2)
return true;
}
return false;
}
};
int main()
{
//TODO 测试活动边表初始化
Solution solution;
int edges[] = { 4,18,14,14,26,22,26,10,14,2,4,6,4,18 };
Edge* newEdges = solution.InitEdges(edges, 6);
ET T;
solution.Init(T, newEdges, 6); //初始化活动边表
initgraph(800, 800, SHOWCONSOLE);
solution.DrawCoordinate(edges, 6);
solution.Draw(T);
getchar();
closegraph();
return 0;
}
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-

C++实现基于EASYX库扫描线算法
本文实例为大家分享了C++实现基于EASYX库扫描线算法的具体代码,供大家参考,具体内容如下 扫描线算法的基本原理 * 作者在扫描线算法的基础上自己设计的更易于理解的地物填充绘制算法 流程图 代码 #include<graphics.h> //#include<conio.h> #include<iostream> using namespace std; //-----------------------------草图形-----------------------
-
C/C++实现图形学扫描线填充算法
在上图形学课的时候,学习了扫描线填充算法.不过在完成实验的时候在真正理解了该算法,在此记录一下,如果有表达上的错误,欢迎指正! 扫描线填充算法通过在与图形相交的第(1,2).(3,4)... 边之间划线不断不断填充图形.因此,在扫描时就需要确定什么时候与图形的某条边相交.划线的时候x的范围是多少以及划线时是从哪个交点画至另一个交点. 结构体如下所示: 为了节省存储的空间,边表项也使用链表结构,将图形中ymin值相同的边链接在同一个边表项后,这样在扫描的时候方便添加. 具体的流程如下: 一.初始化
-
OpenGL扫描线填充算法详解
本文实例为大家分享了OpenGL扫描线填充算法,供大家参考,具体内容如下 说明 把最近一系列的图形学经典算法实现了一下.课业繁忙,关于该系列的推导随后再写.但是在注释里已经有较为充分的分析. 分情况讨论 注意对于横线需要特别讨论,但是对于垂直线却不必特别讨论.想一想为什么? 代码 #include <iostream> #include <GLUT/GLUT.h> #include <map> #include <vector> #include <l
-
python扫描线填充算法详解
本文实例为大家分享了python扫描线填充算法,供大家参考,具体内容如下 介绍 1.用水平扫描线从上到下扫描由点线段构成的多段构成的多边形. 2.每根扫描线与多边形各边产生一系列交点.将这些交点按照x坐标进行分类,将分类后的交点成对取出,作为两个端点,以所填的色彩画水平直线. 3.多边形被扫描完毕后,填色也就完成. 数据结构 活性边表: 新边表: 代码(使用数组) import numpy as np from PIL import Image from PIL import ImageDraw
-
Android多边形区域扫描线种子填充算法的示例
1.3扫描线种子填充算法 1.1和1.2节介绍的两种种子填充算法的优点是非常简单,缺点是使用了递归算法,这不但需要大量栈空间来存储相邻的点,而且效率不高.为了减少算法中的递归调用,节省栈空间的使用,人们提出了很多改进算法,其中一种就是扫描线种子填充算法.扫描线种子填充算法不再采用递归的方式处理"4-联通"和"8-联通"的相邻点,而是通过沿水平扫描线填充像素段,一段一段地来处理"4-联通"和"8-联通"的相邻点.这样算法处理过程
-
Android多边形区域递归种子填充算法的示例代码
平面区域填充算法是计算机图形学领域的一个很重要的算法,区域填充即给出一个区域的边界(也可以是没有边界,只是给出指定颜色),要求将边界范围内的所有象素单元都修改成指定的颜色(也可能是图案填充).区域填充中最常用的是多边形填色,本文中我们就讨论几种多边形区域填充算法. 一.种子填充算法(Seed Filling) 如果要填充的区域是以图像元数据方式给出的,通常使用种子填充算法(Seed Filling)进行区域填充.种子填充算法需要给出图像数据的区域,以及区域内的一个点,这种算法比较适合人机交互方式
-
Android图像处理之泛洪填充算法
泛洪填充算法(Flood Fill Algorithm) 泛洪填充算法又称洪水填充算法是在很多图形绘制软件中常用的填充算法,最熟悉不过就是windows paint的油漆桶功能.算法的原理很简单,就是从一个点开始附近像素点,填充成新的颜色,直到封闭区域内的所有像素点都被填充新颜色为止.泛红填充实现最常见有四邻域像素填充法,八邻域像素填充法,基于扫描线的像素填充方法.根据实现又可以分为递归与非递归(基于栈). 在介绍算法的三种实现方式之前,首先来看一下测试该算法的UI实现.基本思路是选择一张要填充
-
VB.NET中使用种子填充算法实现给图片着色的例子
某人最近在使用C#写一个类似Windows的画图工具,在填色的部分卡住了.劳资要他使用种子填充算法着色(不要调用Windows提供的API,否则还锻炼个毛线),现在我把这个功能实现了,程序的效率很高.现在在这里大概写一下实现方法. 程序是用VB.NET写的,C#写法类似(而且还不需要使用Marshal类访问非托管资源,更加方便).程序的运行结果如下: 种子填充算法说白了就是宽度优先搜索算法(BFS),如果你不知道这是什么东西,那说明你数据结构根本就没有学,请自行补充相应的知识. 第一步:实现"铅
-
Opencv学习教程之漫水填充算法实例详解
前言 基本思想是自动选中了和种子点相连的区域,接着将该区域替换成指定的颜色,经常用来标记或者分离图像的一部分进行处理或分析.漫水填充也可以用来从输入图像获取掩码区域,掩码会加速处理过程,或者只处理掩码指定的像素点.其中掩膜Mask用于进一步控制那些区域将被填充颜色(比如说当对同一图像进行多次填充时). int floodFill(inputoutputArray,inputoutputMask,seedPoint,Scalar newVal,Rect* rect=0,Scalar loDiff=
-
Python实现螺旋矩阵的填充算法示例
本文实例讲述了Python实现螺旋矩阵的填充算法.分享给大家供大家参考,具体如下: afanty的分析: 关于矩阵(二维数组)填充问题自己动手推推,分析下两个下表的移动规律就很容易咯. 对于螺旋矩阵,不管它是什么鬼,反正就是依次向右.向下.向右.向上移动. 向右移动:横坐标不变,纵坐标加1 向下移动:纵坐标不变,横坐标加1 向右移动:横坐标不变,纵坐标减1 向上移动:纵坐标不变,横坐标减1 代码实现: #coding=utf-8 import numpy ''''' Author: afanty
-
利用JS实现一个同Excel表现的智能填充算法
前言 本文介绍了关于利用JS实现同Excel表现的智能填充算法的相关内容,分享出供大家参考学习,下面话不多说了,来一起看看详细的介绍吧 在使用Excel的时候,发现它的"智能填充"功能非常有趣,能够智能地分析我当前的内容,然后准确预测出我期望得到的值.排除了AI的加成,发现这个功能其实也可以通过数学理论和简单代码来实现.经过一番折腾,终于用JS实现了大致的功能,然后我把它名为smart-predictor. 项目地址:https://github.com/jrainlau/s...(本