python opencv之SURF算法示例
本文介绍了python opencv之SURF算法示例,分享给大家,具体如下:
目标:
- SURF算法基础
- opencv总SURF算法的使用
原理:
上节课使用了SIFT算法,当时这种算法效率不高,需要更快速的算法。在06年有人提出了SURF算法“加速稳定特征”,从名字上来看,他是SIFT算法的加速版本。
(原文)
在SIFT算法当中使用高斯差分方程(Difference of Gaussian)对高斯拉普拉斯方程( Laplacian of Gaussian)进行近似。然而,SURF使用盒子滤波器进行近似,下面的图片显示了这种近似的方法。在进行卷积计算的时候可以利用积分图像,这是使用盒子形滤波器的一个优点,即计算某个窗口中的像素和的时候,计算量大小,也就是时间复杂度不受到窗口大小的影响。而且,这种运算可以在不用的尺度空间当中实现。
SURF算法计算关键点的尺度和位置信息使用Hessian矩阵实现。
(解释)
文中的高斯拉普拉斯方程(算子)是检测图像中斑点的一种十分常用的方法。以一维高斯函数来检测一维信号中的斑点为例。有一维信号f,高斯函数的一阶导数ddxg" role="presentation">ddxg,信号与高斯函数的一阶导数卷积后,会在边缘处出现极值。如图:
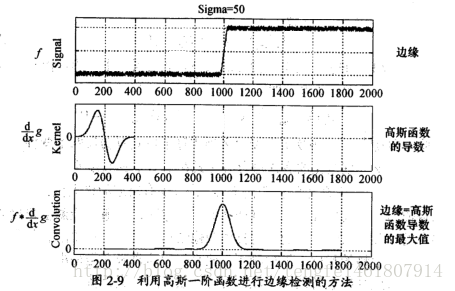
上面图片是在一维情况下,使用高斯函数的一阶导数的情况,另一种方法是使用高斯函数的二阶导数与信号进行卷积,高斯函数的二阶导数也叫做拉普拉斯变换。
但是,在一维信号斑点检测的实际情况当中,一个斑点可以考虑成是两个相邻的跳突组成,如下图。
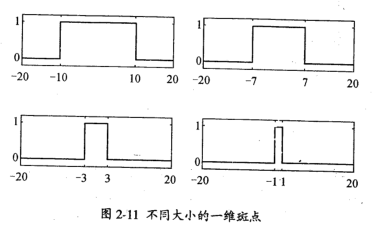
类似于在图像当中,一个轮胎可以当成一个斑点,一个苍蝇也可以当成一个斑点。但是在使用高斯函数的二阶导数来检测斑点的时候,使用不同的高斯核(就是方差)运算不同大小的斑点时,计算出来的极值,即响应值会出现衰减。
此时,需要将高斯函数的二阶导数进行正规化,去除方差值不同导致响应值出现的衰减。
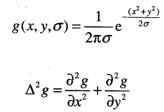
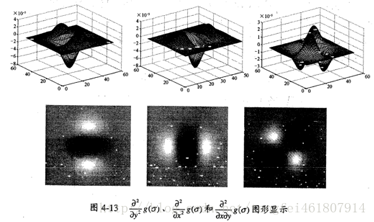
以上,是一维高斯函数检测一维信号的原理。二维的图像信号,使用二维高斯函数来检测斑点原理基本相同,此处的二维高斯函数的二阶导数,就叫做高斯拉普拉斯算子也就是LOG,通过改变不同的方差值,可以检测不同尺寸的二维斑点,如图。
文中的高斯差分方程是SIFT算法当中,发明者想要利用两个相邻高斯尺度空间的图像相减来得到一个LOG的近似,因为这样做可以节省时间,而且可以控制精度变化,类似于高等数学当中泰勒公式那玩意-_- 。关于SIFT原理可以看上一篇博客
文中提到的积分图像实际上原理非常简单,类似递推方程。积分图像的目的是想建立一个函数,能够快速得到一个矩形图像区域当中所有像素值的和是多少。那么,设p(i,j)" role="presentation">p(i,j)表示从(0,0)" role="presentation">(0,0)点到(i,j)" role="presentation">(i,j)点的所有像素的和是多少,存储在p(i,j)" role="presentation">p(i,j)这个数组里面,如果想要获得W区域的像素和是多少,如图,只要计算p(i4,j4)−p(i2,j2)−p(i3,j3)+p(i1,j1)" role="presentation">p(i4,j4)−p(i2,j2)−p(i3,j3)+p(i1,j1)即可。
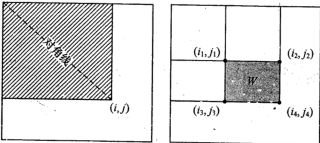
如何求得p(i,j)" role="presentation">p(i,j)? 递推公式为,p(i,j)=p(i−1,j)+p(i,j−1)+I(i,j)−p(i−1,j−1)" role="presentation">p(i,j)=p(i−1,j)+p(i,j−1)+I(i,j)−p(i−1,j−1),这里面I(i,j)" role="presentation">I(i,j)表示像素点(i,j)" role="presentation">(i,j)处的像素值。
文中提到的Hessian矩阵,学过数学分析、最优化、机器学习之类的人肯定对这玩意非常熟悉,实际上黑塞矩阵就是一个多元函数的二阶偏导数构成的方阵,它的行列式值(Determinant of Hessian )可以反映的局部结构信息,简称DOH。与LOG类似,DOH可以使用不同方差生成高斯函数对各个元的二阶偏导模板,以此来对图像进行卷积运算。 同样,DOH也会在卷积后的函数中,得到对图像信号斑点极值的响应。如图
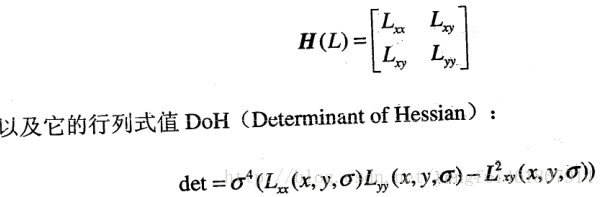
在SURF算法当中,黑塞矩阵中的L,即为二维高斯函数与图像的卷积,求得黑塞矩阵后,会得到如图。
将上面得到的模板与图像的卷积转换为盒子滤波器,这里使用原文中的图像,如图。

得到三个不同的盒子滤波器以后,对其进行近似和简化操作,并用其表示图像中某点的斑点响应值,遍历图像当中的所有像素,就得到了在某一尺度下斑点检测的响应图像。然后,利用不同的模板尺寸,获取多尺度斑点响应金字塔,在金字塔中搜索极值点,下面的操作就和SIFT算法类似了。
(原文)
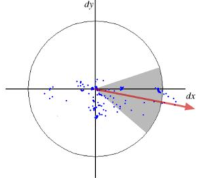
为了给找到的特征点赋予方向,以特征点为中心,6s为半径获取水平和垂直小波响应运算结果,这里s是特征点尺度,同时使用高斯加权的方法。然后,他们会被绘制在如下图当中。其中,特征点的主方向估计运算是有一个弧度为60的扇形窗口,在滑动的过程中不断计算其中的响应值之和。有趣的是,小波响应值在任意尺度下使用积分图像很容易被获取。但是在多数情况下,旋转不变性不是必须的,可以代码当中将这一步取消,这样还能够提高算法计算速度,而且在+-15度的情况也保持稳定,此时该方法称作 U-SURF。用户可以设置upright参数,当参数为0计算方向,参数为1不计算方向。
对于特征点描述的建立,SURF再一次使用Haar小波响应,同时使用积分图像使操作变得简单。在一个矩形区域当中,以特征点为中心,划取周围20s×20s区域的大小,以特征点为原点,主方向为横轴,分成四个子区域,每个子区域使用2s的Haar小波响应,对于每个子区域,获取一个向量,记录垂直、水平方向上的小波响应值,如图。

这个特征描述符的长度使64,降低维度可以加速计算,又可以区分特征。为了更好的区分特征点,SURF还使用了长度为128特征描述符。当dy小于0或者大于0时,计算dx或|dx|的和。同样,根据dx的符号计算不同的dy和。因此能够获得双倍的特征。计算复杂度也不会增加。opencv当中的extended参数为0或1时分别对应64和128的特征。
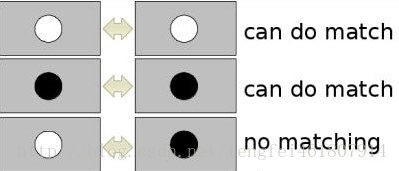
另外一个重要的改善是对潜在的兴趣点使用了拉普拉斯算子符号(黑塞矩阵的迹)。由于之前的计算已经完成对黑塞矩阵的构造,所以这步不会增加复杂度。
拉普拉斯符号在不同明暗背景下区分不同亮度的斑点,在匹配阶段,我们只需要比较拥有相同对比度的特征是否匹配即可,这样加快了计算速度,如图。
SURF算法的速度是SIFT速度的3倍,善于处理模糊和旋转的图像,但是不善于处理视角变化和关照变化。
(解释)
文中的小波响应运算,全称是haar小波运算。这里使用haar小波目的是为了获取图像梯度,使用之前计算好的图像积分结果,这样能够提高计算速度。与SIFT算法类似,在对每个特征点获取主方向时,使用原文中提到的一个π/3大小的扇形窗口,同时以0.2弧度为步长旋转滑动此窗口,在每个窗口当中对的haar响应值的水平方向,垂直方向进行累加。由于时使用一个圆形区域,转换成类似极坐标矢量的方式来表示,每个窗口中的结果(mw,θw)" role="presentation">(mw,θw),如图。

主方向最大Haar响应值累加对应的方向。其中,如果除了主方向,还有其它方向的响应累加值较大,算法当中还会额外添加一个特征点,并赋予另外一个次大方向。
文中建立的特征描述符顾名思义,就是描述一个特征点的一组向量,里面唯一确定了一个特征。SURF获取主方向后,需要获取特征点描述子。以特征点为原点,主方向为横轴建立一个二维坐标系,区域大小是20s×20s,分成是个之块,每个子块利用2s的haar模板进行响应计算。然后统计Σdx、Σ|dx|、Σdy、Σ|dy|" role="presentation">Σdx、Σ|dx|、Σdy、Σ|dy|,每个20s的窗口分成4×4的子窗口,每个子窗口中又5s×5s个像元。如图
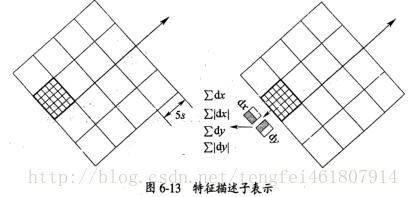
又4×4个子块,每个子块里面记录四个值,所以描述子一共又4×4×4=64个特征。
最后将沿着主方向的小波响应值扭转过来,原理就是简单的旋转矩阵。
代码部分
opencv里面提供的SURF算法和SIFT差不多,这两个玩意都是受到版权保护的,如果你是用pip 一条命令安装的opencv,那么恭喜你用不了SURF和SIFT算法,印象中只有2.4.9版本的opencv库才可以使用。
不过,办法还是有的,再控制台当中输入pip install opencv-contrib-python 就可以用了。
如果还是无法安装,可以直接网站早opencv-contrib-python的轮子,然后放到对应的文件下安装就行了。
我的版本是opencv 3.2,和教程文档中的使用方法不同。
详细参数可以自己去查一查,一查一个准的
https://docs.opencv.org/master/d5/df7/classcv_1_1xfeatures2d_1_1SURF.html
import cv2
import numpy as np
img = cv2.imread('feng.jpg')
#参数为hessian矩阵的阈值
surf = cv2.xfeatures2d.SURF_create(400)
#找到关键点和描述符
key_query,desc_query = surf.detectAndCompute(img,None)
#把特征点标记到图片上
img=cv2.drawKeypoints(img,key_query,img)
cv2.imshow('sp',img)
cv2.waitKey(0)

凤的嘴上特征点占了这么多,辨识度还是蛮高的~ -_-|||
下面是设置方向,和输出一些值的方法
import cv2
import numpy as np
img = cv2.imread('feng.jpg')
#参数为hessian矩阵的阈值
surf = cv2.xfeatures2d.SURF_create(4000)
#设置是否要检测方向
surf.setUpright(True)
#输出设置值
print(surf.getUpright())
#找到关键点和描述符
key_query,desc_query = surf.detectAndCompute(img,None)
img=cv2.drawKeypoints(img,key_query,img)
#输出描述符的个数
print(surf.descriptorSize())
cv2.imshow('sp',img)
cv2.waitKey(0)
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-
python opencv之SURF算法示例
本文介绍了python opencv之SURF算法示例,分享给大家,具体如下: 目标: SURF算法基础 opencv总SURF算法的使用 原理: 上节课使用了SIFT算法,当时这种算法效率不高,需要更快速的算法.在06年有人提出了SURF算法"加速稳定特征",从名字上来看,他是SIFT算法的加速版本. (原文) 在SIFT算法当中使用高斯差分方程(Difference of Gaussian)对高斯拉普拉斯方程( Laplacian of Gaussian)进行近似.然而,SURF使
-
python opencv之SIFT算法示例
本文介绍了python opencv之SIFT算法示例,分享给大家,具体如下: 目标: 学习SIFT算法的概念 学习在图像中查找SIFT关键的和描述符 原理: (原理部分自己找了不少文章,内容中有不少自己理解和整理的东西,为了方便快速理解内容和能够快速理解原理,本文尽量不使用数学公式,仅仅使用文字来描述.本文中有很多引用别人文章的内容,仅供个人记录使用,若有错误,请指正出来,万分感谢) 之前的harris算法和Shi-Tomasi 算法,由于算法原理所致,具有旋转不变性,在目标图片发生旋转时依然
-
python opencv之分水岭算法示例
本文介绍了python opencv之分水岭算法示例,分享给大家,具体如下: 目标 使用分水岭算法对基于标记的图像进行分割 使用函数cv2.watershed() 原理: 灰度图像可以被看成拓扑平面,灰度值高的区域可以看出山峰,灰度值低的区域可以看成是山谷.向每一个山谷当中灌不同颜色的水.水位升高,不同山谷的水会汇合,为防止不同山谷的水汇合,小在汇合处建立起堤坝.然后继续灌水,然后再建立堤坝,直到山峰都掩模.构建好的堤坝就是图像的分割. 此方法通常会得到过渡分割的结果,因为图像中的噪声以及其他因
-

Python OpenCV实现图形检测示例详解
目录 1. 轮廓识别与描绘 1.1 cv2.findComtours()方法 1.2 cv2.drawContours() 方法 1.3 代码示例 2. 轮廓拟合 2.1 矩形包围框拟合 - cv2.boundingRect() 2.2圆形包围框拟合 - cv2.minEnclosingCircle() 3. 凸包 绘制 4. Canny边缘检测 - cv2.Canny() 4.1 cv2.Canny() 用法简介 4.2 代码示例 5. 霍夫变换 5.1 概述 5.2 cv2.HoughLin
-
Python OpenCV图像颜色变换示例
目录 给图像添加颜色 图像按位操作 图像的通道操作 给图像添加颜色 在使用OpenCV操作图像时,有时候需要给图像添加不同的颜色,以达到不同的风格效果.这里介绍的主要是opencv中的cv.applyColorMap()函数. 给图像应用颜色函数cv.applyColorMap(src, colormap, dst=None)src:表示传入的原图:colormap:颜色图类型(17种).可以单独使用,也可以以一个列表的形式批量使用. 以下图举例实现: 直接上代码: # -*-coding:ut
-
Python OpenCV Canny边缘检测算法的原理实现详解
目录 Gaussian smoothing Computing the gradient magnitude and orientation Non-maxima suppression Hysteresis thresholding OpenCV实现 Gaussian smoothing 总的来说,Canny边缘检测可以分为四个步骤: 由于边缘检测对噪声敏感,因此对图像应用高斯平滑以帮助减少噪声.具体做法是,采用一个5*5的高斯平滑滤波器对图像进行滤波处理. Computing the gra
-
Python实现的堆排序算法示例
本文实例讲述了Python实现的堆排序算法.分享给大家供大家参考,具体如下: 堆排序的思想: 堆是一种数据结构,可以将堆看作一棵完全二叉树,这棵二叉树满足,任何一个非叶节点的值都不大于(或不小于)其左右孩子节点的值. 将一个无序序列调整为一个堆,就可以找出这个序列的最大值(或最小值),然后将找出的这个值交换到序列的最后一个,这样有序序列就元素就增加一个,无序序列元素就减少一个,对新的无序序列重复这样的操作,就实现了排序. 堆排序的执行过程: 1.从无序序列所确定的完全二叉树的第一个非叶子节点开始
-
Python实现的线性回归算法示例【附csv文件下载】
本文实例讲述了Python实现的线性回归算法.分享给大家供大家参考,具体如下: 用python实现线性回归 Using Python to Implement Line Regression Algorithm 小菜鸟记录学习过程 代码: #encoding:utf-8 """ Author: njulpy Version: 1.0 Data: 2018/04/09 Project: Using Python to Implement LineRegression Algor
-
Python实现的归并排序算法示例
本文实例讲述了Python实现的归并排序算法.分享给大家供大家参考,具体如下: 归并排序是建立在归并操作上的一种有效的排序算法,该算法是采用分治法(Divide and Conquer)的一个非常典型的应用. 将已有序的子序列合并,得到完全有序的序列:即先使每个子序列有序,再使子序列段间有序.若将两个有序表合并成一个有序表,称为二路归并. Python实现代码如下: #-*- coding: UTF-8 -*- import numpy as np def Merge(a, f, m, l):
-
Python实现的knn算法示例
本文实例讲述了Python实现的knn算法.分享给大家供大家参考,具体如下: 代码参考机器学习实战那本书: 机器学习实战 (Peter Harrington著) 中文版 机器学习实战 (Peter Harrington著) 英文原版[附源代码] 有兴趣你们可以去了解下 具体代码: # -*- coding:utf-8 -*- #! python2 ''''' @author:zhoumeixu createdate:2015年8月27日 ''' #np.zeros((4,2)) #np.zero