FreeRTOS实时操作系统Cortex-M内核使用注意事项
前言
在阅读本文之前,有两个定义在FreeRTOSConfig.h中的宏,你必须先明白它们是什么意思,《FreeRTOS内核配置说明》一文中,讲解了这两个宏:
configKERNEL_INTERRUPT_PRIORITY
configMAX_SYSCALL_INTERRUPT_PRIORITY
FreeRTOS与Cortex-M内核可谓是绝配,以至于让移植和使用FreeRTOS都变得更简单起来。根据FreeRTOS官方反馈,在Cortex-M内核上使用FreeRTOS大多数的问题点是由不正确的优先级设置引起的。这个问题也是在意料之中的,因为尽管Cortex-M内核的中断模式是非常强大的,但对于那些使用传统中断优先级架构的工程师来说,Cortex-M内核中断机制也有点笨拙(或者是说使用比较繁琐),并且违反直觉(这个主要是因为Cortex-M中断优先级数值越大代表的优先级反而越小)。本章打算描述Cortex-M的中断优先级机制,并描述怎样结合RTOS内核使用。
说明:虽然Cortex-M内核的优先级方案看上去比较复杂,但每一个官方发布的FreeRTOS 接口包(在FreeRTOSV7.2.0\FreeRTOS\Source\portable文件夹中,一般为port.c)内都会有正确配置的演示例程,可以以此为参考。
1.有效优先级
1.1Cortex-M 硬件详述
首先需要清楚有效优先级的总数,这取决于微控制器制造商怎么使用Cortex内核。所以,并不是所有的Cortex-M内核微处理器都具有相同的中断优先级级别。
Cortex-M构架自身最多允许256级可编程优先级(优先级配置寄存器最多8位,所以优先级范围从0x00~0xFF),但是绝大多数微控制器制造商只是使用其中的一部分优先级。比如,TI Stellaris Cortex-M3和Cortex-M4微控制器使用优先级配置寄存器的3个位,能提供8级优先级。再比如,NXP LPC17xx Cortex-M3微控制器使用优先级配置寄存器的5个位,能提供32级优先级。
1.2应用到RTOS
RTOS中断嵌套方案将有效的中断优先级分成两组:一组可以通过RTOS临界区屏蔽,另一组不受RTOS影响,永远都是使能的。宏configMAX_SYSCALL_INTERRUPT_PRIORITY在FreeRTOSConfig.h中配置,定义两组中断优先级的边界。逻辑优先级高于此值的中断不受RTOS影响。最优值取决于微控制器使用的优先级配置寄存器的位数。
2.与数值相反的优先级值和逻辑优先级设置
2.1Cortex-M 硬件详述
有必要先解释一下优先级值和逻辑优先级:在Cortex-M内核中,假如有8级优先级,我们说优先级值是0~7,但数值最大的优先级7却代表着最低的逻辑优先级。很多使用传统传统中断优先级架构的工程师会觉得这样比较绕,违反直觉。以下内容提到的优先级要仔细区分是优先级数值还是逻辑优先级。
接下来需要清楚的是,在Cortex-M内核中,一个中断的优先级数值越低,逻辑优先级却越高。比如,中断优先级为2的中断可以抢占中断优先级为5的中断,但反过来就不行。换句话说,中断优先级2比中断优先级5的优先级更高。
这是Cortex-M内核最容易让人犯错之处,因为大多数的非Cortex-M内核微控制器的中断优先级表述是与之相反的。
2.2应用到 RTOS
以“FromISR”结尾的FreeRTOS函数是具有中断调用保护的(执行这些函数会进入临界区),但是就算是这些函数,也不可以被逻辑优先级高于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断服务函数调用。(宏configMAX_SYSCALL_INTERRUPT_PRIORITY定义在头文件FreeRTOSConfig.h中)。因此,任何使用RTOSAPI函数的中断服务例程的中断优先级数值大于等于configMAX_SYSCALL_INTERRUPT_PRIORITY宏的值。这样就能保证中断的逻辑优先级等于或低于configMAX_SYSCALL_INTERRUPT_PRIORITY。
Cortex中断默认情况下有一个数值为0的优先级。大多数情况下0代表最高级优先级。因此,绝对不可以在优先级为0的中断服务例程中调用RTOSAPI函数。
3.Cortex-M 内部优先级概述
3.1Cortex-M 硬件详述
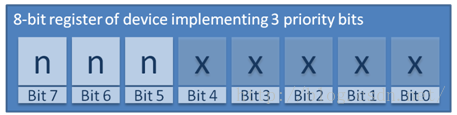
Cortex-M内核的中断优先级寄存器是以最高位(MSB)对齐的。比如,如果使用了3位来表达优先级,则这3个位位于中断优先级寄存器的bit5、bit6、bit7位。剩余的bit0~bit4可以设置成任何值,但为了兼容,最好将他们设置成1.
Cortex-M优先级寄存器最多有8位,如果一个微控制器只使用了其中的3位,那么这3位是以最高位对齐的,见下图:
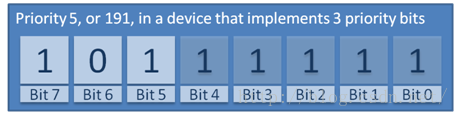
某微控制器只使用了优先级寄存器中的3位,下图展示了优先级数值5(二进制101B)是怎样在优先级寄存器中存储的。如果优先级寄存器中未使用的位置1,下图也展示了为什么数值5(二进制0000 0101B)可以看成数值191(二进制1011 1111)的。
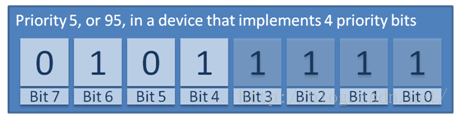
某微控制器只使用了优先级寄存器中的4位,下图展示了优先级数值5(二进制101B)是怎样在优先级寄存器中存储的。如果优先级寄存器中未使用的位置1,下图也展示了为什么数值5(二进制0000 0101B)可以看成数值95(二进制0101 1111)的。
3.2应用到 RTOS
上文中已经描述,那些在中断服务例程中调用RTOS API函数的中断逻辑优先级必须低于或等于configMAX_SYSCALL_INTERRUPT_PRIORITY(低逻辑优先级意味着高优先级数值)。
CMSIS以及不同的微控制器供应商提供了可以设置某个中断优先级的库函数。一些库函数的参数使用最低位对齐,另一些库函数的参数可能使用最高位对齐,所以,使用时应该查阅库函数的应用手册进行正确设置。
可以在FreeRTOSConfig.h中设置宏configMAX_SYSCALL_INTERRUPT_PRIORITY和configKERNEL_INTERRUPT_PRIORITY的值。这两个宏需要根据Cortex-M内核自身的情况进行设置,要以最高有效位对齐。比如某微控制器使用中断优先级寄存器中的3位,设置configKERNEL_INTERRUPT_PRIORITY的值为5,则代码为:
#define configKERNEL_INTERRUPT_PRIORITY (5<<(8-3))
宏configKERNEL_INTERRUPT_PRIORITY指定RTOS内核使用的中断优先级,因为RTOS内核不可以抢占用户任务,因此这个宏一般设置为硬件支持的最小优先级。对于Cortex-M硬件,RTOS使用到硬件的PendSV和SysTick硬件中断,在函数xPortStartScheduler()中(该函数在port.c中,由启动调度器函数vTaskStartScheduler()调用),将PendSV和SysTick硬件中断优先级寄存器设置为宏configKERNEL_INTERRUPT_PRIORITY指定的值。
有关代码如下(位于port.c):
/*PendSV优先级设置寄存器地址为0xe000ed22 SysTick优先级设置寄存器地址为0xe000ed23*/ #define portNVIC_SYSPRI2_REG ( * ( ( volatile uint32_t * ) 0xe000ed20 )) #define portNVIC_PENDSV_PRI ( ( (uint32_t)configKERNEL_INTERRUPT_PRIORITY ) << 16UL ) #define portNVIC_SYSTICK_PRI ( ( (uint32_t)configKERNEL_INTERRUPT_PRIORITY ) << 24UL ) /* …. */ /*确保PendSV 和SysTick为最低优先级中断 */ portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI; portNVIC_SYSPRI2_REG |=portNVIC_SYSTICK_PRI;
4.临界区
4.1Cortex-M 硬件详述
RTOS内核使用Cortex-M内核的BASEPRI寄存器来实现临界区(注:BASEPRI为优先级屏蔽寄存器,优先级数值大于或等于该寄存器的中断都会被屏蔽,优先级数值越大,逻辑优先级越低,但是为零时不屏蔽任何中断)。这允许RTOS内核可以只屏蔽一部分中断,因此可以提供一个灵活的中断嵌套模式。
那些需要在中断调用时保护的API函数,FreeRTOS使用寄存器BASEPRI实现中断保护临界区。当进入临界区时,将寄存器BASEPRI的值设置成configMAX_SYSCALL_INTERRUPT_PRIORITY,当退出临界区时,将寄存器BASEPRI的值设置成0。很多Bug反馈都提到,当退出临界区时不应该将寄存器设置成0,应该恢复它之前的状态(之前的状态不一定是0)。但是Cortex-M NVIC决不会允许一个低优先级中断抢占当前正在执行的高优先级中断,不管BASEPRI寄存器中是什么值。与进入临界区前先保存BASEPRI的值,退出临界区再恢复的方法相比,退出临界区时将BASEPRI寄存器设置成0的方法可以获得更快的执行速度。
4.2应用到RTOS kernel
RTOS内核通过写configMAX_SYSCALL_INTERRUPT_PRIORITY的值到BASEPRI寄存器的方法创建临界区。中断优先级0(具有最高的逻辑优先级)不能被BASEPRI寄存器屏蔽,因此,configMAX_SYSCALL_INTERRUPT_PRIORITY绝不可以设置成0。
以上就是FreeRTOS实时操作系统Cortex-M内核使用注意事项的详细内容,更多关于FreeRTOS Cortex-M内核使用的资料请关注我们其它相关文章!
相关推荐
-
FreeRTOS操作系统的配置示例解析
目录 1. FreeRTOSConfig.h 文件 2. “INCLUDE_” 开始的宏 3.“config”开始的宏 FreeRTOS 的系统配置文件为 FreeRTOSConfig.h,在此配置文件中可以完成 FreeRTOS 的裁剪和配置. 1. FreeRTOSConfig.h 文件 FreeRTOS 的配置基本是通过在 FreeRTOSConfig.h 中使用“#define”这样的语句来定义宏定义实现的.在 FreeRTOS 的官方 demo 中,每个工程都有一个 FreeRTOS
-
FreeRTOS实时操作系统结构示例
目录 1.查找相关文档页 2.获取RTOS源代码 3.FreeRTOS源码目录结构 移植层目录举例: 演示例程目录举例: 4.编译工程 5.运行演示例程 FreeRTOS可以被移植到很多不同架构的处理器和编译器.每一个RTOS移植都附带一个已经配置好的演示例程,可以方便快速启动开发.更好的是,每个演示例程都附带一个说明网页,提供如何定位RTOS演示工程源代码.如何编译演示例程.如何配置硬件平台的全部信息. 演示例程说明网页还提供基本的RTOS移植细节信息,包括如何编写FreeRTOS兼容的中断服
-

FreeRTOS实时操作系统内核配置说明
目录 1.configUSE_PREEMPTION 2.configUSE_PORT_OPTIMISED_TASK_SELECTION 3.configUSE_TICKLESS_IDLE 4.configUSE_IDLE_HOOK 5.configUSE_MALLOC_FAILED_HOOK 6.configUSE_TICK_HOOK 7.configCPU_CLOCK_HZ 8.configTICK_RATE_HZ 9.configMAX_PRIORITIES 10.configMINIMAL
-
FreeRTOS实时操作系统在Cortex-M3上的移植过程
目录 1. FreeRTOS下载包的文件结构 2. 移植前的一些准备 3.移植过程 3.1 添加RTOS核心代码 3.2 添加头文件路径 3.3 编写FreeRTOSConfig.h文件 3.4 编写一些钩子函数 3.5 检查硬件 3.6 挂接中断 3.7 建立第一个任务Task 3.8 设置节拍时钟 3.9设置中断优先级相关宏 3.10 设置其它宏 3.11 创建任务 4. 小结 1. FreeRTOS下载包的文件结构 在FreeRTOS官方网站可以下载到最新版的FreeRTOS包,我这里使用
-
freertos实时操作系统临界段保护开关中断及进入退出
目录 中断的基础知识 嵌套: 优先级: 中断的悬起与解悬: 咬尾中断Tail‐Chaining: 晚到的高优先级异常: 进入临界段和退出临界段 中断的基础知识 嵌套: 嵌套向量中断控制器 NVIC(Nested Vectored Interrupt Controller与内核是紧耦合的.提供如下的功能:可嵌套中断支持.向量中断支持.动态优先级调整支持.中断延迟大大缩短. 中断可屏蔽. 所有的外部中断和绝大多数系统异常均支持可嵌套中断.异常都可以被赋予不同的优先级,当前优先级被存储在 xPSR的专
-
FreeRTOS编码标准及风格指南
目录 1.编码标准 2.命名规则 1> 变量 2> 函数 1.编码标准 FreeRTOS的核心源代码遵从MISRA编码标准指南.这个标准篇幅稍长,你可以在MISRA官方网站花少量钱买到,这里不再复制任何标准. FreeRTOS源代码不符合MISRA标准的项目如下所示: 有两个API函数有多个返回点.MISRA编码标准强制规定:一个函数在其结尾应该有单一的返回点. 指针算数运算,在创建任务时,为了兼容8.16.20.24.32位总线,不可避免的使用了指针算数运算.MISRA编码标准强制规定:指针
-
FreeRTOS实时操作系统Cortex-M内核使用注意事项
前言 在阅读本文之前,有两个定义在FreeRTOSConfig.h中的宏,你必须先明白它们是什么意思,<FreeRTOS内核配置说明>一文中,讲解了这两个宏: configKERNEL_INTERRUPT_PRIORITY configMAX_SYSCALL_INTERRUPT_PRIORITY FreeRTOS与Cortex-M内核可谓是绝配,以至于让移植和使用FreeRTOS都变得更简单起来.根据FreeRTOS官方反馈,在Cortex-M内核上使用FreeRTOS大多数的问题点是由不正确
-
FreeRTOS实时操作系统特点介绍
目录 1.什么是FreeRTOS? 2.为什么择 选择 FreeRTOS ? 3.FreeRTOS 特点 FreeRTOS资料与源码下载 FreeRTOS源码文件介绍 1.什么是FreeRTOS? Free 即免费的,RTOS 全称是 Real Time Operating System,中文就是实时操作系统.注意,RTOS 不是指某一个确定的系统,而是指一类系统.比如 uC/OS,FreeRTOS,RTX,RT-Thread 等这些都是 RTOS 类操作系统. 操作系统允许多个任务同时运行,这
-
freertos实时操作系统空闲任务阻塞延时示例解析
阻塞态:如果一个任务当前正在等待某个外部事件,则称它处于阻塞态. rtos中的延时叫阻塞延时,即任务需要延时的时候,会放弃CPU的使用权,进入阻塞状态.在任务阻塞的这段时间,CPU可以去执行其它的任务(如果其它的任务也在延时状态,那么 CPU 就将运行空闲任务),当任务延时时间到,重新获取 CPU 使用权,任务继续运行. 空闲任务:处理器空闲的时候,运行的任务.当系统中没有其他就绪任务时,空闲任务开始运行,空闲任务的优先级是最低的. 空闲任务 定义空闲任务: #define portSTACK_
-
FreeRTOS实时操作系统空闲任务的阻塞延时实现
目录 什么是阻塞延时.为什么需要空闲任务 空闲任务的实现 阻塞延时的实现 xTicksToDelay 递减 SysTick初始化 仿真 什么是阻塞延时.为什么需要空闲任务 RTOS中的延时叫阻塞延时,即任务需要延时时,任务会放弃cpu使用权,cpu转而去做其他的事,当任务延时时间到后,任务重新请求获得cpu使用权.但当所有的任务都处于阻塞后,为了不让cpu空闲没事干就需要一个空闲任务让cpu干活. 空闲任务的实现 空闲任务实现和创建普通任务没区别,空闲任务在调用vTaskStartSchedul
-
FreeRTOS实时操作系统队列的API函数讲解
目录 FreeRTOS为操作队列提供了非常丰富的API函数,包括队列的创建.删除,灵活的入队和出队方式.带中断保护的入队和出队等等.下面就来详细讲述这些API函数. 1.获取队列入队信息数目1.1函数描述 UBaseType_t uxQueueMessagesWaiting( QueueHandle_t xQueue ); 返回队列中存储的信息数目.具有中断保护的版本为uxQueueMessagesWaitingFromISR(),原型为:UBaseType_t uxQueueMessagesW
-
FreeRTOS实时操作系统队列基础
目录 本文介绍队列的基本知识,详细源码分析见<FreeRTOS高级篇5---FreeRTOS队列分析> 1.FreeRTOS队列 队列是主要的任务间通讯方式.可以在任务与任务间.中断和任务间传送信息.大多数情况下,队列用于具有线程保护的FIFO(先进先出)缓冲区:新数据放在队列的后面.当然,数据也可以放在队列的前面,在下一篇讲队列API函数时,会涉及到数据的存放位置. 图1-1:读写队列 图1-1所示的队列中,最多能保存5个项目,并且假设队列永远不会满.任务A使用API函数xQueueSend
-
FreeRTOS实时操作系统多任务管理基础知识
目录 什么是多任务系统? FreeRTOS 任务与协程 1.任务(Task) 的特性 2.协程(Co-routine)的特性 任务状态 运行态 就绪态 阻塞态 挂起态 任务优先级 任务实现 任务控制块 任务堆栈 RTOS 系统的核心就是任务管理,FreeRTOS 也不例外,而且大多数学习 RTOS 系统的工程师或者学生主要就是为了使用 RTOS 的多任务处理功能,初步上手 RTOS 系统首先必须掌握的也是任务的创建.删除.挂起和恢复等操作,由此可见任务管理的重要性. 什么是多任务系统? 回想一
-
FreeRTOS实时操作系统临界段保护场合示例
目录 临界段保护场合 非中断场合 中断场合 临界段保护场合 FreeRTOS中临界段保护有2种场合,中断和非中断,通过关中断(或者关部分中断)来实现临界保护. 非中断场合 task.h 中 #define taskENTER_CRITICAL()portENTER_CRITICAL() #define taskEXIT_CRITICAL()portEXIT_CRITICAL() portmacro.h中 #define portENTER_CRITICAL()vPortEnterCritical
-
FreeRTOS实时操作系统之可视化追踪调试
目录 前言 1.使能可视化追踪和运行时间统计功能 2.获取任务信息并格式化 3.添加到命令解释列表 前言 用RTOS编程,为每个任务分配多大的堆栈空间就成了一项技术活:分配多了浪费系统资源,分配少了又恐怕会发生堆栈溢出.由于中断和抢占式调度器的存在,我们要估算出一个任务需要多少堆栈是非常困难的,今天我们就介绍一种方法,来获取每个任务的剩余堆栈空间.本文以NXP LPC177x_8x系列微控制器为例. 我们将这个功能做成一个命令,添加到FreeRTOS使用任务通知实现命令行解释器一文介绍的命令解释