OpenCV-Python实现图像平滑处理操作
什么是图像平滑处理
在尽量保留图像原有信息的情况下,过滤掉图像内部的噪声,这一过程我们称之为图像的平滑处理,所得到的图像称为平滑图像。
那么什么是图像的噪声呢?
图像的噪声就是图像中与周围像素点差异较大的像素点。噪声的处理就是将其更改为临近像素点的近似值,使图像更平滑。
图像平滑处理的噪声取值的方式有以下6种:
(1)均值滤波
(2)方框滤波
(3)高斯滤波
(4)中值滤波
(5)双边滤波
(6)2D卷积(自定义滤波)
均值滤波
均值滤波是指用当前像素点周围N*N个像素点的均值来代替当前像素值。使用该方法遍历处理图像内的每一个像素点,即可完成整幅图像的均值滤波。
在进行均值滤波处理时,我们需要考虑对周围多少个像素点取平均值。通常情况下,我们会以当前像素点为中心,对行数和列数相等的一块区域内的所有像素点取平均值。
但是边缘像素点可能不能这样做,毕竟比如左上角的像素点是没有左上像素点的,这个时候我们常常会取图像内存在的周围邻域点的平均值。
在OpenCV中,它给我们提供的均值滤波函数为cv2.blur(),其完整定义如下:
def blur(src, ksize, dst=None, anchor=None, borderType=None):
src:原始图像
kszie:滤波中心的大小,也就是取平均值的周围像素点的高度与宽度,比如(5,5),就是取5*5邻域像素点均值作为结果。
anchor:锚点,其默认值为(-1,1),表示当前计算均值的点位于核的中心点位置。一般使用默认值即可。
borderType:边界样式,该值决定了以何种方式处理边界,一般情况下不需要更改。
了解了该函数的定义,下面我们简单的来完成一个去噪图像,具体代码如下所示:
import cv2
img = cv2.imread("5.jpg")
result_5img = cv2.blur(img, (5, 5))
result_30img= cv2.blur(img, (30, 30))
cv2.imshow("img", img)
cv2.imshow("result_5img", result_5img)
cv2.imshow("result_30img", result_30img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:
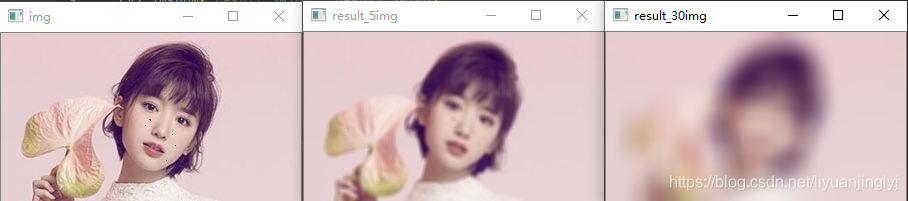
从上图可以看出来,使用(5,5)卷积进行均值滤波处理后图像虽然模糊,但还可以辨认。而使用(30,30)卷积进行均值滤波,图像失真非常严重。
所以,我们可以得出来,卷积核越大,去噪效果越好,花费的时间越长,同时图像失真也越严重。而实际的处理中,我们需要在失真与去噪之间取得平衡,选取合适的卷积大小。
方框滤波
方框滤波与均值滤波的不同之处在于,方框滤波不会计算像素均值,它可以自由选择是否对均值滤波的结果进行归一化,即可以自由选择滤波结果是邻域像素值之和的平均值,还是邻域像素值之和。
在OpenCV中,它提供cv2.boxFilter()函数来实现方框滤波,其完整定义如下:
def boxFilter(src, ddepth, ksize, dst=None, anchor=None, normalize=None, borderType=None):
src:原始图像
ddepth:处理结果图像的图像深度,一般使用-1表示与原图像使用相同的图像深度
ksize:滤波核心的大小
normalize:是否在滤波时进行归一化处理。当它为1时,表示要进行归一化处理,也就是邻域像素值的和除以面积,比如(3,3),公式如下:

当它为0时,表示不需要进行归一化处理,直接使用邻域像素值的和。
下面,我们来用程序分别实现归一化与不归一化的效果,代码如下:
import cv2
img = cv2.imread("5.jpg")
result1 = cv2.boxFilter(img, -1, (5, 5))
result2 = cv2.boxFilter(img, -1, (30, 30))
result3 = cv2.boxFilter(img, -1, (2, 2),normalize=0)
cv2.imshow("img", img)
cv2.imshow("result1", result1)
cv2.imshow("result2", result2)
cv2.imshow("result3", result3)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,显示的效果如下所示:

可以看到,左下角不需要归一化处理,这里只取(2,2),如果你取大了,可以试试。因为范围大了,和一般都会大于255,那么就会造成图像全是白色。
高斯滤波
在进行均值滤波与方框滤波时,其邻域内每个像素的权重是相等的。而高斯滤波会将中心点的权重加大,远离中心点的权重减小,以此来计算邻域内各个像素值不同权重的和。
在OpenCV中,它给我们提供cv2.GaussianBlur()函数进行高斯滤波,其完整定义如下:
def GaussianBlur(src, ksize, sigmaX, dst=None, sigmaY=None, borderType=None):
src:原始图像
ksize:滤波核的大小
sigmaX:卷积和在水平方向上(X轴方向)的标准差,其控制的是权重比例
sigmaY:卷积和在垂直方向上(Y轴方向)的标准差,也是控制的是权重比例。如果它为0,只采用sigmaX的值,如果sigmaX与sigmaY都是0,则通过ksize.width和ksize.height计算得到(可选参数)
下面,我们来使用高斯滤波看看效果,代码如下所示:
import cv2
img = cv2.imread("5.jpg")
result = cv2.GaussianBlur(img, (3, 3), 0, 0)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:

中值滤波
中值滤波与前面的三种滤波都不同,它不在采用加权求均值的方式计算滤波结果,而是用邻域内所有像素值的中间值来代替当前像素点的像素值。
简单点说,就是取当前像素点及其周围临近像素点的像素值,将这些值进行排序后,取中间位置的像素值作为当前位置的像素值。
在OpenCV中,它提供给我们cv2.medianBlur()函数来进行中值滤波,其完整定义如下:
def medianBlur(src, ksize, dst=None):
src:原始图像
kszie:滤波核的大小
参数就两个,下面我们来用代码测试一下:
import cv2
img = cv2.imread("5.jpg")
result = cv2.medianBlur(img, 3)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,显示效果如下:

可以看到,这里我们将脸上的红点去掉了。需要特别注意的是,滤波核的大小必须是奇数,矩阵中心点向外衍生必然是奇数,不信可以随便矩阵取一点试试。
双边滤波
双边滤波是综合考虑空间信息和色彩信息的滤波方式,在滤波的过程中能够有效地保护图像内的边缘信息。
前面滤波方式基本只考虑了空间的权重信息,这种情况计算起来比较方便,但是边缘信息的处理上存在较大问题。而双边滤波在处理边缘时,与当前点色彩相近的像素点给与较大的权重值,而与当前像素点色彩差别大的会给较小的权重,这样就保护了边缘信息。
简单点概括,双边滤波在计算某一个像素点的新值时,不仅考虑距离信息,还考虑色彩信息。双边滤波即能有效地去除噪声,又能很好地保护边缘信息。
在OpenCV中,它给我们提供cv2.bilateralFilter()函数来实现,其完整定义如下:
def bilateralFilter(src, d, sigmaColor, sigmaSpace, dst=None, borderType=None):
src:原始图像
d:在滤波时选取的空间距离参数,这里表示以当前像素点为中心点的直径。如果该值为非正数,则会从参数sigmaSpace计算得到。如果滤波空间较大,比如d>5,则速度较慢。因此,在实际的应用中,推荐d=5。对于噪声较大的离线滤波,可以选择d=9。
sigmaColor:在滤波处理时,选择的颜色范围,该值决定了周围哪些像素点能够参与到滤波中来。与当前像素点的像素值差值小于sigmaColor的像素点,能够参与到当前的滤波中。该值越大,就说明周围有越多的像素点可以参与到运算中。该值为0时,滤波失去意义;该值为255,指定直径内的所有点都能够参与运算。
sigmaSpace:坐标空间中的sigma值。它的值越大,说明有越多的点能够参与到滤波计算中来。当d>0时,无论sigmaSpace的值如何,d都指定邻域大小;否则,d域sigmaSpace的值成比例。
为了简单起见,博主这里将两个sigmaColor与sigmaSpace值设置为相同的。如果它们的值比较小,比如小于10,滤波的效果不太明显;如果它们的值较大,比如大于150,则滤波效果会比较明显。
代码如下所示:
import cv2
img = cv2.imread("5.jpg")
result = cv2.bilateralFilter(img,25,50,50)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,显示效果如下所示:

2D卷积
在OpenCV中,除了提供上面这些常用的滤波方式之外,还允许用户自定义卷积核实现卷积操作。这个函数是cv2.Filter2D(),其完整定义如下:
def filter2D(src, ddepth, kernel, dst=None, anchor=None, delta=None, borderType=None):
src:原始图像
ddepth:处理结果图像的深度,-1与原图像一致。
kernel:卷积核,是一个单通道数组。如果想在处理彩色图像时,让每个通道使用不同的核,则必须将彩色图像分解后使用不同的核完成。
delta:修正值,可选参数。如果该值存在,会在基础滤波的结果上加上该值作为最终的滤波结果。
下面,我们来使用这个函数看看效果,具体代码如下所示:
import cv2
import numpy as np
img = cv2.imread("5.jpg")
kernel = np.ones((9,9), np.float32) / 81
result = cv2.filter2D(img, -1, kernel)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:

到此这篇关于OpenCV-Python实现图像平滑处理操作的文章就介绍到这了,更多相关OpenCV 图像平滑处理内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
Python调用OpenCV实现图像平滑代码实例
主要讲解Python调用OpenCV实现图像平滑,包括四个算法:均值滤波.方框滤波.高斯滤波和中值滤波. 给图像增加噪声: import cv2 import numpy as np def test10(): img = cv2.imread("result.jpg", cv2.IMREAD_UNCHANGED) rows, cols, chn = img.shape # 加噪声 for i in range(5000): x = np.random.randint(0, rows)
-

Python OpenCV 针对图像细节的不同操作技巧
本系列专栏写作将采用首创的问答式写作形式,快速让你学习到 OpenCV 的初级.中级.高级知识. 6. 在 Python OpenCV 针对图像细节的不同操作 本篇博客的目标将为你解释一幅图像的拆解,包括图像像素的说明,图像属性信息的获取与修改, 图像目标区域 ROI 相关内容,以及图像通道的知识(包括拆分通道和合并通道) 这些内容在知识结构上与 numpy 库十分紧密,如果从学习的角度出发,建议你储备一下 numpy 相关知识. 读取修改图像的像素值 在之前的博客中,我们已经学到了如何读取一幅
-
深入学习Python+Opencv常用四种图像处理操作
目录 改变色彩空间: cv.cvtColor() 改变图像大小:cv.resize() 二维卷积操作 常用模糊 opencv图像处理(深度学习中常用的) 改变色彩空间: cv.cvtColor() cv.cvtColor(img, flag) img:原图像 flag:要改变的类型 常用的flag有:cv.COLOR_BGR2GRAY (BGR->GRAY).cv.COLOR_BGR2HSV img = cv.imread(r'E:\0_postgraduate\test.jpg') gray
-
Python OpenCV对图像像素进行操作
目录 遍历并修改图像像素值 图像的加减乘除运算 遍历并修改图像像素值 在使用opencv处理图像时,有时需要对图像的每个像素点进行处理,比如取反.修改值等操作,就需要通过h和w遍历像素.依然以下图为例: 具体代码: import cv2 as cv import numpy as np def image_pixel(image_path: str): img = cv.imread(image_path, cv.IMREAD_COLOR) cv.imshow('input', img) h,
-
详解Python+OpenCV进行基础的图像操作
目录 介绍 形态变换 腐蚀 膨胀 创建边框 强度变换 对数变换 线性变换 去噪彩色图像 使用直方图分析图像 介绍 众所周知,OpenCV是一个用于计算机视觉和图像操作的免费开源库. OpenCV 是用 C++ 编写的,并且有数千种优化的算法和函数用于各种图像操作.很多现实生活中的操作都可以使用 OpenCV 来解决.例如视频和图像分析.实时计算机视觉.对象检测.镜头分析等. 许多公司.研究人员和开发人员为 OpenCV 的创建做出了贡献.使用OpenCV 很简单,而且 OpenCV 配备了许多工
-
Python opencv应用实现图片切分操作示例
目录 说明 操作说明 代码 切换效果 说明 之前下载来zip包的漫画,里面的图片都是两张一起的: 但是某些漫画查看软件不支持自动分屏,看起来会比较不舒服,所以只能自己动手来切分. 操作说明 Python有不少的库支持图片操作,其中比较著名的一个是OpenCV. OpenCV是一个跨平台的计算机视觉库,Python下有它的接口实现. Python默认不带OpenCV,所以需要先用pip下载: OpenCV功能强大,这里用来做图片的切分其实是牛刀小试. 关于OpenCV的功能,这里不多介绍,有兴趣的
-
Python+OpenCV实现基本的图像处理操作
目录 模块的安装 图片的各种操作 读取图像 展示图像 图片保存 图片的各种属性 图像的基本操作 今天小编来和大家分享一下Python在图像处理当中的具体应用,那既然是图像处理,那必然要提到opencv模块了,该模块支持与计算机视觉和机器学习相关的众多算法,并且应用领域正在日益扩展,大致有以下几种领域 物体识别:通过视觉以及内部存储来进行物体的判断 图像分割 人脸识别 汽车安全驾驶 人机交互 等等 当然这次小编并不打算将这么高深的内容,今天就从最基本的opencv模块在图像的基本操作上说起 模块的
-
opencv python简易文档之图像处理算法
目录 将图片转为灰度图 HSV 图像阈值 图像平滑 形态学-腐蚀操作 形态学-膨胀操作 开运算与闭运算 梯度运算 礼帽与黑帽 图像梯度处理 Canny边缘检测 图像金字塔 图像轮廓 直方图 直方图均衡化: 自适应均衡化: 傅里叶变换 模板匹配 总结 上一篇已经给大家介绍了opencv python图片基本操作的相关内容,这里继续介绍图像处理算法,下面来一起看看吧 将图片转为灰度图 import cv2 #opencv读取的格式是BGR img=cv2.imread('cat.jpg') # 将图
-
opencv python 图片读取与显示图片窗口未响应问题的解决
显示图像是 Opencv最基本的操作之一, imshow()函数可以实现该操作.如果使用过其他GUI框架背景,就会很自然地调用 imshow来显示一幅图像.但这个观点并不完全正确,因为图像确实会显示出来,但随即会消失. 例如下面代码: import cv2 import numpy as np img = cv2.imread('C://Users/yefci/Pictures/0.2.jpg') cv2.imshow('C://Users/yefci/Pictures/0.2.jpg',img
-
OpenCV+python实现膨胀和腐蚀的示例
1,概念及原理: 膨胀(Dilating) (或) (1)将图像 A 与任意形状的内核 (B),通常为正方形或圆形,进行卷积. (2)内核 B 有一个可定义的 锚点, 通常定义为内核中心点. (3)进行膨胀操作时,将内核 B 划过图像A,将内核 B 覆盖区域的最大相素值提取,并代替锚点位置的相素.显然,这一最大化操作将会导致图像中的亮区开始"扩展" (因此有了术语膨胀 dilation ). 以3*3的内核为例: 腐蚀(Eroding) (与) (1)腐蚀在形态学操作家族里是膨胀操作的
-
OpenCV+Python几何变换的实现示例
几何变换 图像的几何变换是指将一幅图像映射到另一幅图像内.有缩放.翻转.仿射变换.透视.重映射等操作. 1 缩放 使用cv2.resize()函数实现对图像的缩放,但要注意cv2.resize()函数内的dsize参数与原图像的行列属性是相反的,也就是:目标图像的行数是原始图像的列数,目标图像的列数是原始图像的行数. 下面举例说明cv2.resize()函数的用法: import cv2 img=cv2.imread('E:/python_opencv/tupian.jpg') rows,col