深入理解Android Matrix理论与使用的详解
以前在线性代数中学习了矩阵,对矩阵的基本运算有一些了解,前段时间在使用GDI+的时候再次学习如何使用矩阵来变化图像,看了之后在这里总结说明。
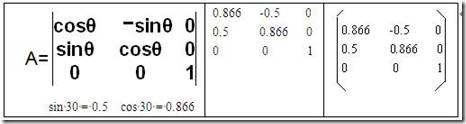
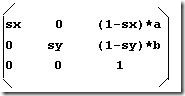
首先大家看看下面这个3 x 3的矩阵,这个矩阵被分割成4部分。为什么分割成4部分,在后面详细说明。
首先给大家举个简单的例子:现设点P0(x0, y0)进行平移后,移到P(x,y),其中x方向的平移量为△x,y方向的平移量为△y,那么,点P(x,y)的坐标为:
x = x0 + △x
y = y0 + △y
采用矩阵表达上述如下: 
上述也类似与图像的平移,通过上述矩阵我们发现,只需要修改矩阵右上角的2个元素就可以了。
我们回头看上述矩阵的划分: 
为了验证上面的功能划分,我们举个具体的例子:现设点P0(x0 ,y0)进行平移后,移到P(x,y),其中x放大a倍,y放大b倍,
矩阵就是: ,按照类似前面“平移”的方法就验证。
,按照类似前面“平移”的方法就验证。
图像的旋转稍微复杂:现设点P0(x0, y0)旋转θ角后的对应点为P(x, y)。通过使用向量,我们得到如下:
x0 = r cosα
y0 = r sinα
x = r cos(α+θ) = x0 cosθ - y0 sinθ
y = r sin(α+θ) = x0 sinθ + y0 cosθ
于是我们得到矩阵:
如果图像围绕着某个点(a ,b)旋转呢?则先要将坐标平移到该点,再进行旋转,然后将旋转后的图像平移回到原来的坐标原点,在后面的篇幅中我们将详细介绍。
Matrix学习——如何使用Matrix
本篇幅我们就结合Android 中的android.graphics.Matrix来具体说明,还记得我们前面说的图像旋转的矩阵:
从最简单的旋转90度的是:
在android.graphics.Matrix中有对应旋转的函数:
Matrix matrix = new Matrix();
matrix.setRotate(90);
Test.Log(MAXTRIX_TAG,”setRotate(90):%s” , matrix.toString());

查看运行后的矩阵的值(通过Log输出):

与上面的公式基本完全一样(android.graphics.Matrix采用的是浮点数,而我们采用的整数)。
有了上面的例子,相信大家就可以亲自尝试了。通过上面的例子我们也发现,我们也可以直接来初始化矩阵,比如说要旋转30度:
前面给大家介绍了这么多,下面我们开始介绍图像的镜像,分为2种:水平镜像、垂直镜像。先介绍如何实现垂直镜像,什么是垂直镜像就不详细说明。图像的垂直镜像变化也可以用矩阵变化的表示,设点P0(x0 ,y0 )进行镜像后的对应点为P(x ,y ),图像的高度为fHeight,宽度为fWidth,原图像中的P0(x0 ,y0 )经过垂直镜像后的坐标变为(x0 ,fHeight- y0);
x = x0
y = fHeight – y0
推导出相应的矩阵是:
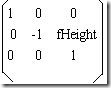
final float f[] = {1.0F,0.0F,0.0F,0.0F,-1.0F,120.0F,0.0F,0.0F,1.0F};
Matrix matrix = new Matrix();
matrix.setValues(f);
按照上述方法运行后的结果: 
至于水平镜像采用类似的方法,大家可以自己去试试吧。
实际上,使用下面的方式也可以实现垂直镜像:
Matrix matrix = new Matrix();
matrix.setScale (1.0,-1.0);
matrix.postTraslate(0, fHeight);
这就是我们将在后面的篇幅中详细说明。
Matrix学习——图像的复合变化
Matrix学习——基础知识篇幅中,我们留下一个话题:如果图像围绕着某个点P(a,b)旋转,则先要将坐标系平移到该点,再进行旋转,然后将旋转后的图像平移回到原来的坐标原点。
我们需要3步:
1. 平移——将坐标系平移到点P(a,b);
2. 旋转——以原点为中心旋转图像;
3. 平移——将旋转后的图像平移回到原来的坐标原点;
相比较前面说的图像的几何变化(基本的图像几何变化),这里需要平移——旋转——平移,这种需要多种图像的几何变化就叫做图像的复合变化。
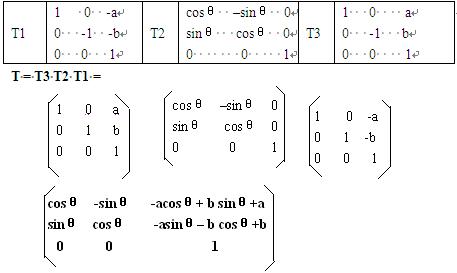
设对给定的图像依次进行了基本变化F1、F2、F3…..、Fn,它们的变化矩阵分别为T1、T2、T3…..、Tn,图像复合变化的矩阵T可以表示为:T = TnTn-1…T1。
按照上面的原则,围绕着某个点(a,b)旋转θ的变化矩阵序列是:
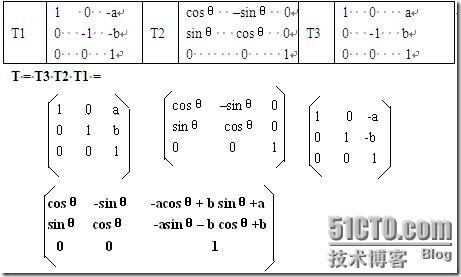
按照上面的公式,我们列举一个简单的例子:围绕(100,100)旋转30度(sin 30 = 0.5 ,cos 30 = 0.866)
float f[]= { 0.866F, -0.5F, 63.4F,0.5F, 0.866F,-36.6F,0.0F, 0.0F, 1.0F };
matrix = new Matrix();
matrix.setValues(f);
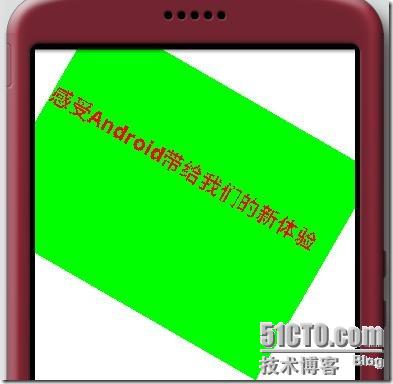
旋转后的图像如下:
Android为我们提供了更加简单的方法,如下:
Matrix matrix = new Matrix();
matrix.setRotate(30,100,100);
矩阵运行后的实际结果: 
与我们前面通过公式获取得到的矩阵完全一样。
在这里我们提供另外一种方法,也可以达到同样的效果:
float a = 100.0F,b = 100.0F;
matrix = new Matrix();
matrix.setTranslate(a,b);
matrix.preRotate(30);
matrix.preTranslate(-a,-b);
将在后面的篇幅中为大家详细解析
通过类似的方法,我们还可以得到:相对点P(a,b)的比例[sx,sy]变化矩阵
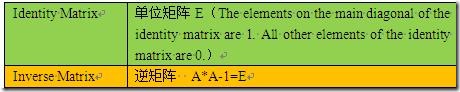
Matrix学习——Preconcats or Postconcats?
从最基本的高等数学开始,Matrix的基本操作包括:+、*。Matrix的乘法不满足交换律,也就是说A*B ≠B*A。还有2种常见的矩阵:
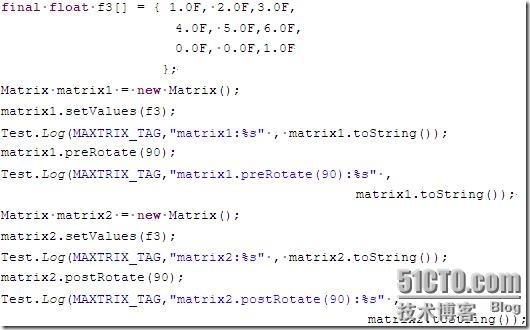
有了上面的基础,下面我们开始进入主题。由于矩阵不满足交换律,所以用矩阵B乘以矩阵A,需要考虑是左乘(B*A),还是右乘(A*B)。在Android的android.graphics.Matrix中为我们提供了类似的方法,也就是我们本篇幅要说明的Preconcats matrix 与 Postconcats matrix。下面我们还是通过具体的例子还说明:
通过输出的信息,我们分析其运行过程如下:
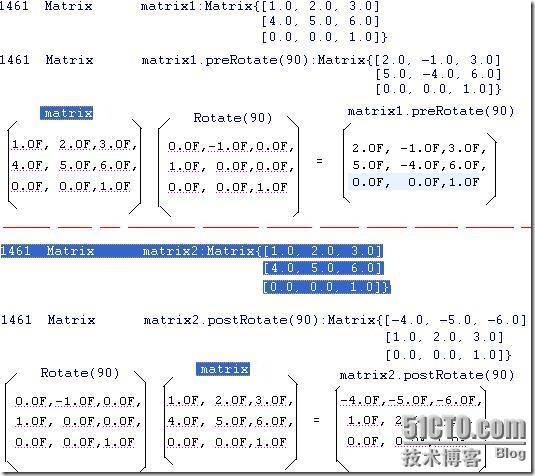
看了上面的输出信息。我们得出结论:Preconcats matrix相当于右乘矩阵,Postconcats matrix相当于左乘矩阵。

Matrix学习——错切变换
什么是图像的错切变换(Shear transformation)?我们还是直接看图片错切变换后是的效果:

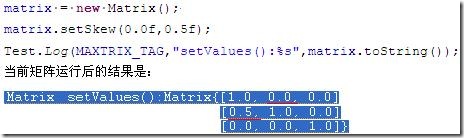
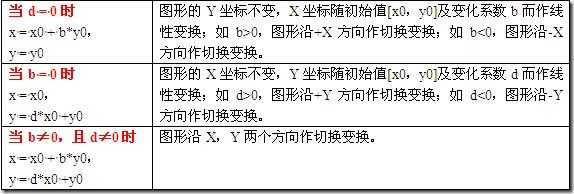
对图像的错切变换做个总结:

x = x0 + b*y0;
y = d*x0 + y0;
这里再次给大家介绍一个需要注意的地方:

通过以上,我们发现Matrix的setXXXX()函数,在调用时调用了一次reset(),这个在复合变换时需要注意。
Matrix学习——对称变换(反射)
什么是对称变换?具体的理论就不详细说明了,图像的镜像就是对称变换中的一种。
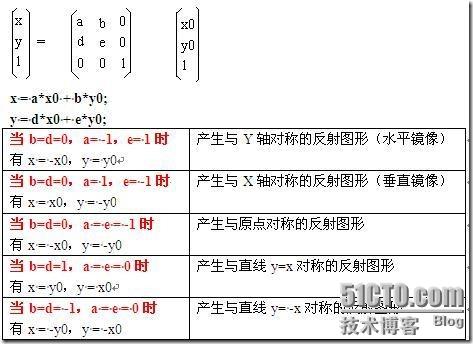
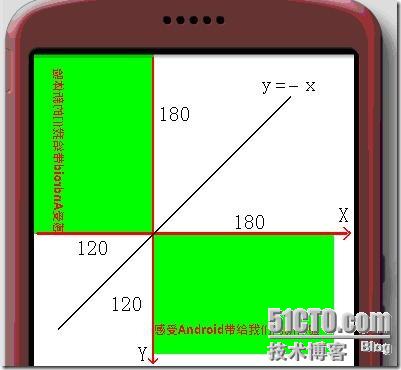
利用上面的总结做个具体的例子,产生与直线y= – x对称的反射图形,代码片段如下:
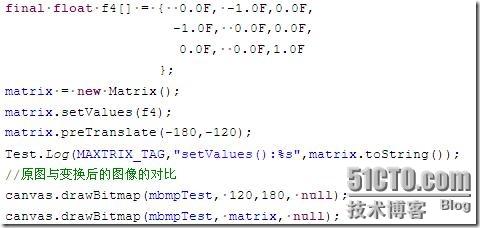
当前矩阵输出是:

图像变换的效果如下:
附:三角函数公式
两角和公式
sin(a+b)=sinacosb+cosasinb
sin(a-b)=sinacosb-sinbcosa
cos(a+b)=cosacosb-sinasinb
cos(a-b)=cosacosb+sinasinb
tan(a+b)=(tana+tanb)/(1-tanatanb)
tan(a-b)=(tana-tanb)/(1+tanatanb)
cot(a+b)=(cotacotb-1)/(cotb+cota)
cot(a-b)=(cotacotb+1)/(cotb-cota)
倍角公式
tan2a=2tana/[1-(tana)^2]
cos2a=(cosa)^2-(sina)^2=2(cosa)^2 -1=1-2(sina)^2
sin2a=2sina*cosa
半角公式
sin(a/2)=√((1-cosa)/2) sin(a/2)=-√((1-cosa)/2)
cos(a/2)=√((1+cosa)/2) cos(a/2)=-√((1+cosa)/2)
tan(a/2)=√((1-cosa)/((1+cosa)) tan(a/2)=-√((1-cosa)/((1+cosa))
cot(a/2)=√((1+cosa)/((1-cosa)) cot(a/2)=-√((1+cosa)/((1-cosa))
tan(a/2)=(1-cosa)/sina=sina/(1+cosa)
和差化积
2sinacosb=sin(a+b)+sin(a-b)
2cosasinb=sin(a+b)-sin(a-b) )
2cosacosb=cos(a+b)-sin(a-b)
-2sinasinb=cos(a+b)-cos(a-b)
sina+sinb=2sin((a+b)/2)cos((a-b)/2
cosa+cosb=2cos((a+b)/2)sin((a-b)/2)
tana+tanb=sin(a+b)/cosacosb
积化和差公式
sin(a)sin(b)=-1/2*[cos(a+b)-cos(a-b)]
cos(a)cos(b)=1/2*[cos(a+b)+cos(a-b)]
sin(a)cos(b)=1/2*[sin(a+b)+sin(a-b)]
诱导公式
sin(-a)=-sin(a)
cos(-a)=cos(a)
sin(pi/2-a)=cos(a)
cos(pi/2-a)=sin(a)
sin(pi/2+a)=cos(a)
cos(pi/2+a)=-sin(a)
sin(pi-a)=sin(a)
cos(pi-a)=-cos(a)
sin(pi+a)=-sin(a)
cos(pi+a)=-cos(a)
tga=tana=sina/cosa
万能公式
sin(a)= (2tan(a/2))/(1+tan^2(a/2))
cos(a)= (1-tan^2(a/2))/(1+tan^2(a/2))
tan(a)= (2tan(a/2))/(1-tan^2(a/2))
其它公式
a*sin(a)+b*cos(a)=sqrt(a^2+b^2)sin(a+c) [其中,tan(c)=b/a]
a*sin(a)-b*cos(a)=sqrt(a^2+b^2)cos(a-c) [其中,tan(c)=a/b]
1+sin(a)=(sin(a/2)+cos(a/2))^2
1-sin(a)=(sin(a/2)-cos(a/2))^2
其他非重点三角函数
csc(a)=1/sin(a)
sec(a)=1/cos(a)
双曲函数
sinh(a)=(e^a-e^(-a))/2
cosh(a)=(e^a+e^(-a))/2
tgh(a)=sinh(a)/cosh(a)
相关推荐
-

Android 矩阵ColorMatrix
中文名:坐标矩阵 高等数学里有介绍,在图像处理方面,主要是用于平面的缩放.平移.旋转等操作. 在Android里面,Matrix由9个float值构成,是一个3*3的矩阵.最好记住.如下图 各个字段的含义: 上面的sinX和cosX,表示旋转角度的cos值和sin值,注意,旋转角度是按顺时针方向计算的. translateX和translateY表示x和y的平移量.scale是缩放的比例,1是不变,2是表示缩放1/2,这样子. 如何使用 set,pre,post方法 Matrix调用一系列set
-
Android中使用Matrix控制图形变换和制作倒影效果的方法
最近在使用Matrix进行绘图的操作.对Matrix的一些方法有了一些更深的体会,记下来,以便日后复习. Matrix常用的方法: 一.变换方法: Matrix提供了translate(平移).rotate(旋转).scale(缩放).skew(倾斜)四种操作,这四种操作的内部实现过程都是通过matrix.setValues(-)来设置矩阵的值来达到变换图片的效果. Matrix的每种操作都有set.pre.post三种操作,set是清空队列再添加,pre是在队列最前面插入,post是在队列最后
-
android.graphics.Matrix类用法分析
本文实例讲述了android.graphics.Matrix类用法.分享给大家供大家参考,具体如下: Matrix类包含了一个3x3的矩阵用来改变坐标,它没有一个构造器来初始化它里边的内容,所以创建实例后需要调用reset()方法生成一个标准matrix,或者调用set..一类的函数,比如setTranslate, setRotate,,该函数将会决定matrix如何来改变坐标.SDK里边没有讲述Matrix的3x3矩阵是如何改变点的坐标值的,但是我在代码里边通过打印那9个点的值时,大致可以得到
-
Android中利用matrix 控制图片的旋转、缩放、移动
本文主要讲解利用android中Matrix控制图形的旋转缩放移动,具体参见一下代码: 复制代码 代码如下: /** * 使用矩阵控制图片移动.缩放.旋转 */ public class CommonImgEffectView extends View { private Context context ; private Bitmap mainBmp , controlBmp ; private int mainBmpWidth , mainBmpHeight , c
-
android高仿小米时钟(使用Camera和Matrix实现3D效果)
继续练习自定义View..毕竟熟才能生巧.一直觉得小米的时钟很精美,那这次就搞它~这次除了练习自定义View,还涉及到使用Camera和Matrix实现3D效果. 一个这样的效果,在绘制的时候最好选择一个方向一步一步的绘制,这里我选择由外到内.由深到浅的方向来绘制,代码步骤如下: 1.首先老一套~新建attrs.xml文件,编写自定义属性如时钟背景色.亮色(用于分针.秒针.渐变终止色).暗色(圆弧.刻度线.时针.渐变起始色),新建MiClockView继承View,重写构造方法,获取自定义属性值
-
android Matrix实现图片随意放大缩小或拖动
本文实例为大家分享了android Matrix图片随意放大缩小和拖动的具体代码,供大家参考,具体内容如下 step1:新建一个项目DragAndZoom,并准备一张照片放在res/drawable-hdpi目录下,如下图所示: step2: 设置应用的UI界面,在main.xml中设置: <?xml version="1.0" encoding="utf-8"?> <LinearLayout xmlns:android="http://
-
Android中Matrix用法实例分析
本文实例讲述了Android中Matrix用法.分享给大家供大家参考,具体如下: Matrix ,中文里叫矩阵,高等数学里有介绍,在图像处理方面,主要是用于平面的缩放.平移.旋转等操作. 首先介绍一下矩阵运算.加法和减法就不用说了,对应位相加就好.图像处理,主要用到的是乘法 .下面是一个乘法的公式: 在 Android 里面, Matrix 由 9 个 float 值构成,是一个 3*3 的矩阵.如下图: 解释一下,上面的sinX 和cosX ,表示旋转角度的cos 值和sin值,注意,旋转角度
-
Android变形(Transform)之Matrix用法
引言 最近在研究Android的变形,Android的2D变形(包括缩放,扭曲,平移,旋转等)可以通过Matrix来实现,3D变形可以通过Camera来实现.接下来就将我这俩天研究的东西和大家分享下,先来看看Matrix的用法. 效果图 变形以后 Matrix矩阵 坐标变换矩阵,即一个3*3的矩阵,用来对图形进行坐标变换. 图1.1 A为坐标矩阵,C为原始矩阵,R是A和C矩阵相乘记过,那么可以知道:(矩阵知识,大学没学好的伤不起啊) x' = a*x + b*y + c y' = d*x +
-
Android使用Matrix旋转图片模拟碟片加载过程
今天实现了一个模拟碟片加载过程的小demo,在此展示一下.由于在公司,不好截取动态图片,因此就在这截取两张静态图片看看效果先. 下面简单的将代码列出来. setp1.准备两张用于旋转的图片,如下:loading_disc.png是第一张图片,loading_light.png是第二张图片. step2.自定义一个View,用来控制这两个图片的旋转.com.oyp.loadingdisk.LoadingDiscView.java package com.oyp.loadingdisk;
-
Android Matrix源码详解
Matrix的数学原理 在Android中,如果你用Matrix进行过图像处理,那么一定知道Matrix这个类.Android中的Matrix是一个3 x 3的矩阵,其内容如下: Matrix的对图像的处理可分为四类基本变换: Translate 平移变换 Rotate 旋转变换 Scale 缩放变换 Skew 错切变换 从字面上理解,矩阵中的MSCALE用于处理缩放变换,MSK
-
详谈Android中Matrix的set、pre、post的区别
说set.pre.post的区别之前,先说说Matrix. Matrix包含一个3 X 3的矩阵,专门用于图像变换匹配. Matrix提供了四种操作: •translate(平移) •rotate(旋转) •scale(缩放) •skew(倾斜) 也就是说这4种操作都是对这个3 X 3的矩阵设值来达到变换的效果. Matrix没有结构体,它必须被初始化,通过reset或set方法. OK,Matrix介绍完了,我们来看看set.pre.post的区别. pre是在队列最前面插入,post是在队列