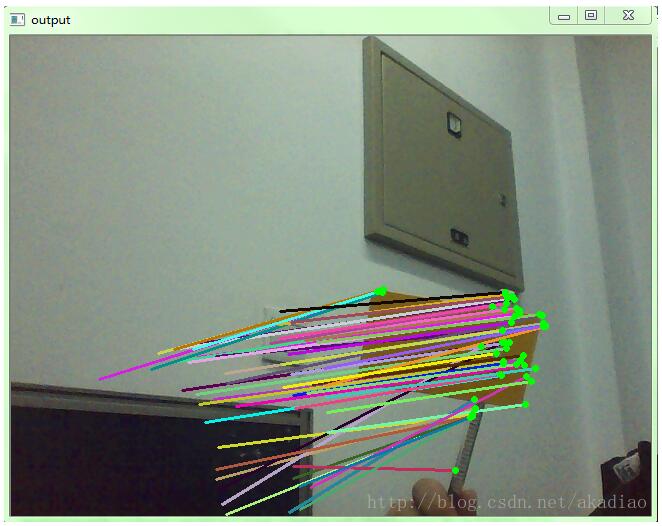
opencv3/C++实现光流点追踪
光流金字塔
calcOpticalFlowPyrLK()函数参数说明:
void calcOpticalFlowPyrLK( InputArray prevImg, //第一个8位输入图像或者通过 buildOpticalFlowPyramid()建立的金字塔 InputArray nextImg,//第二个输入图像或者和prevImg相同尺寸和类型的金字塔 InputArray prevPts, //二维点向量存储找到的光流;点坐标必须是单精度浮点数 InputOutputArray nextPts,//输出二维点向量(用单精度浮点坐标)包括第二幅图像中计算的输入特征的新点位置;当OPTFLOW_USE_INITIAL_FLOW 标志通过,向量必须有和输入一样的尺寸。 OutputArray status, //输出状态向量(无符号char);如果相应的流特征被发现,向量的每个元素被设置为1,否则,被置为0. OutputArray err,//输出错误向量;向量的每个元素被设为相应特征的一个错误,误差测量的类型可以在flags参数中设置;如果流不被发现然后错误未被定义(使用status(状态)参数找到此情形)。 Size winSize = Size(21,21), //在每个金字塔水平搜寻窗口的尺寸。 int maxLevel = 3,//最大金字塔层数; 如果设置为0,则不使用金字塔(单层),如果设置为1,则使用两个层次,依此类推; 如果将金字塔传递给输入,则算法将使用与金字塔一样多的级别,但不超过maxLevel。 TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 0.01),//指定迭代搜索算法的终止标准(指定的最大迭代次数criteria.maxCount或搜索窗口移动小于criteria.epsilon) int flags = 0, //操作标志 double minEigThreshold = 1e-4 //计算光流方程的2×2标准矩阵的最小特征值除以窗口中的像素数量;如果这个值小于minEigThreshold,那么一个相应的特征被过滤出来,且它的光流不被处理,所以它允许去除坏点提升性能。 );
#include<opencv2/opencv.hpp>
using namespace cv;
//光流跟踪
Mat frame, gray, pr_frame, pr_gray;
std::vector<Point2f> inPoints;
std::vector<Point2f> fpts[2];
void trackFeature();
int main()
{
VideoCapture capture;
capture.open(0);
if(!capture.isOpened())
{
printf("can not open the camear......\n");
return -1;
}
namedWindow("input", CV_WINDOW_AUTOSIZE);
namedWindow("output", CV_WINDOW_AUTOSIZE);
while (capture.read(frame))
{
cvtColor(frame, gray, COLOR_BGR2GRAY);
if (fpts[0].size() < 40)
{
imshow("input", frame);
std::vector<Point2f> features;
//角点检测
goodFeaturesToTrack(gray, features, 300, 0.01, 10);
fpts[0].insert(fpts[0].end(), features.begin(), features.end());
inPoints.insert(inPoints.end(), features.begin(), features.end());
}
else
printf("object tracking......\n");
if (pr_gray.empty())
gray.copyTo(pr_gray);
trackFeature();
for (int i = 0; i < fpts[0].size(); i++)
circle(frame, fpts[0][i], 2, Scalar(0,255,0),2,8,0);
gray.copyTo(pr_gray);
frame.copyTo(pr_frame);
imshow("output", frame);
waitKey(1);
}
waitKey(0);
capture.release();
return 0;
}
void trackFeature()
{
std::vector<uchar> status;
std::vector<float> errors;
//计算稀疏特征集的光流
calcOpticalFlowPyrLK(pr_gray, gray, fpts[0], fpts[1], status, errors);
int k = 0;
for (int i = 0; i < fpts[1].size(); i++)
{
double dist = abs(fpts[0][i].x-fpts[1][i].x) + abs(fpts[0][i].y-fpts[1][i].y);
if (dist > 2 && status[i])
{
inPoints[k] = inPoints[i];
fpts[1][k++] = fpts[1][i];
}
}
inPoints.resize(k);
fpts[1].resize(k);
//绘制光流轨迹
RNG rng(0);
for (int i = 0; i < fpts[0].size(); i++)
{
Scalar color = Scalar(rng.uniform(0,255),rng.uniform(0,255),rng.uniform(0,255));
line(frame, inPoints[i], fpts[1][i], color,2);
circle(frame, fpts[1][i], 2, Scalar(0,255,255),2);
}
std::swap(fpts[1], fpts[0]);
}

以上这篇opencv3/C++实现光流点追踪就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
opencv3/C++ 使用Tracker实现简单目标跟踪
简介 MIL: TrackerMIL 以在线方式训练分类器将对象与背景分离;多实例学习避免鲁棒跟踪的漂移问题. OLB: TrackerBoosting 基于AdaBoost算法的在线实时对象跟踪.分类器在更新步骤中使用周围背景作为反例以避免漂移问题. MedianFlow: TrackerMedianFlow 跟踪器适用于非常平滑和可预测的运动,物体在整个序列中可见. TLD: TrackerTLD 将长期跟踪任务分解为跟踪,学习和检测.跟踪器在帧之间跟踪对象.探测器本地化所观察到的所有外观,
-
opencv3/C++图像像素操作详解
RGB图像转灰度图 RGB图像转换为灰度图时通常使用: 进行转换,以下尝试通过其他对图像像素操作的方式将RGB图像转换为灰度图像. #include<opencv2/opencv.hpp> #include<math.h> using namespace cv; int main() { //像素操作 Mat src,dst; src = imread("E:/image/image/daibola.jpg"); if(src.empty()) { printf
-
基于C++实现kinect+opencv 获取深度及彩色数据
开发环境 vs2010+OPENCV2.4.10 首先,下载最新的Kinect 2 SDK http://www.microsoft.com/en-us/kinectforwindows/develop/downloads-docs.aspx 下载之后不要插入Kinect,最好也不用插入除了键盘鼠标以外的其它USB设备,然后安装SDK,安装完成之后插入Kinect,会有安装新设备的提示.安装完成之后可以去"开始"那里找到两个新安装的软件,一个是可以显示Kinect深度图,另外一个软件
-
opencv3/C++基于颜色的目标跟踪方式
inRange函数 void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst); src:输入图像: lowerb:下边界数组,阈值下限: upperb:上边界数组,阈值上限: dst:输出图像: 颜色范围如图: 示例: 捕获摄像头中的黄色方块 #include<opencv2/opencv.hpp> using namespace cv; int main() { VideoCaptu
-
opencv3/C++ HOG特征提取方式
HOG特征 HOG(Histograms of Oriented Gradients)梯度方向直方图 通过利用梯度信息能反映图像目标的边缘信息并通过局部梯度的大小将图像局部的外观和形状特征化.在论文Histograms of Oriented Gradients for Human Detection中被提出. HOG特征的提取过程为: Gamma归一化: 计算梯度: 划分cell 组合成block,统计block直方图: 梯度直方图归一化: 收集HOG特征. Gamma归一化: 对图像颜色进行
-
opencv3/C++实现光流点追踪
光流金字塔 calcOpticalFlowPyrLK()函数参数说明: void calcOpticalFlowPyrLK( InputArray prevImg, //第一个8位输入图像或者通过 buildOpticalFlowPyramid()建立的金字塔 InputArray nextImg,//第二个输入图像或者和prevImg相同尺寸和类型的金字塔 InputArray prevPts, //二维点向量存储找到的光流:点坐标必须是单精度浮点数 InputOutputArray next
-
opencv3/Python 稠密光流calcOpticalFlowFarneback详解
光流是由物体或相机的运动引起的图像对象在两个连续帧之间的视在运动模式.光流方法计算在t和 t+Δtt+Δt时刻拍摄的两个图像帧之间的每个像素的运动位置.这些方法被称为差分,因为它们基于图像信号的局部泰勒级数近似; 也就是说,它们使用关于空间和时间坐标的偏导数. 和稀疏光流相比,稠密光流不仅仅是选取图像中的某些特征点(一般用角点)进行计算;而是对图像进行逐点匹配,计算所有点的偏移量,得到光流场,从而进行配准.因此其计算量会显著大于稀疏光流,但效果一般优于稀疏光流. 函数: def calcOpti
-

Opencv光流运动物体追踪详解
光流的概念是由一个叫Gibson的哥们在1950年提出来的.它描述是空间运动物体在观察成像平面上的像素运动的瞬时速度,利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法.那么所说的光流到底是什么? 简单来说,上图表现的就是光流,光流描述的是图像上每个像素点的灰度的位置(速度)变化情况,光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的"运动".研究光流场的目的就是为了从
-
OpenCV3.0+Python3.6实现特定颜色的物体追踪
一.环境 win10.Python3.6.OpenCV3.x:编译器:pycharm5.0.3 二.实现目标 根据需要追踪的物体颜色,设定阈值,在视频中框选出需要追踪的物体. 三.实现步骤 1)根据需要追踪的物体颜色,设定颜色阈值,获取追踪物体的掩膜 代码:generate_threshold.py # -*- coding : utf-8 -*- # Author: Tom Yu import cv2 import numpy as np cap = cv2.VideoCapture(0)#获
-
图文详解OpenCV中光流以及视频特征点追踪
目录 前言 1. 效果图 2. 原理 2.1 什么是光流?光流追踪的前提.原理 2.2 光流的应用 2.3 光流的2种方法 3. 源码 3.2 稀疏光流追踪 3.2 优化版稀疏光流追踪 3.3 密集光流追踪 总结 前言 这篇博客将介绍光流的概念以及如何使用 Lucas-Kanade 方法估计光流,并演示如何使用 cv2.calcOpticalFlowPyrLK() 来跟踪视频中的特征点. 1. 效果图 光流追踪效果图如下: 它显示了一个球在连续 5 帧中移动.箭头表示其位移矢量. 不是很严谨的-
-
使用OpenCV实现检测和追踪车辆
本文实例为大家分享了OpenCV实现检测和追踪车辆的具体代码,供大家参考,具体内容如下 完整源码GitHub 使用高斯混合模型(BackgroundSubtractorMOG2)对背景建模,提取出前景 使用中值滤波去掉椒盐噪声,再闭运算和开运算填充空洞 使用cvBlob库追踪车辆,我稍微修改了cvBlob源码来通过编译 由于要对背景建模,这个方法要求背景是静止的 另外不同车辆白色区域不能连通,否则会认为是同一物体 void processVideo(char* videoFilename) {
-
opencv+arduino实现物体点追踪效果
本文所要实现的结果是:通过在摄像头中选择一个追踪点,通过pc控制摄像头的舵机,使这一点始终在图像的中心. 要点:使用光流法在舵机旋转的同时进行追踪,若该点运动,则摄像头跟踪联动. #include<opencv2\opencv.hpp> #include<opencv\cv.h> #include<opencv\highgui.h> #include<math.h> #include<Windows.h> #include<string.h
-
python目标检测基于opencv实现目标追踪示例
目录 主要代码 信息封装类 更新utils python-opencv3.0新增了一些比较有用的追踪器算法,这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 主要代码 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视者模块,负责入侵检测,目标跟踪 ''' class WatchDo
-
java中Cookie被禁用后Session追踪问题
一.服务器端获取Session对象依赖于客户端携带的Cookie中的JSESSIONID数据.如果用户把浏览器的隐私级别调到最高,这时浏览器是不会接受Cookie.这样导致永远在服务器端都拿不到的JSESSIONID信息.这样就导致服务器端的Session使用不了. Java针对Cookie禁用,给出了解决方案,依然可以保证JSESSIONID的传输. Java中给出了再所有的路径的后面拼接JSESSIONID信息. 在 Session1Servlet中,使用response.encodeURL