Pytorch 使用Google Colab训练神经网络深度学习
目录
- 学习前言
- 什么是Google Colab
- 相关链接
- 利用Colab进行训练
- 一、数据集与预训练权重的上传
- 1、数据集的上传
- 2、预训练权重的上传
- 二、打开Colab并配置环境
- 1、笔记本的创建
- 2、环境的简单配置
- 3、深度学习库的下载
- 4、数据集的复制与解压
- 5、保存路径设置
- 三、开始训练
- 1、标注文件的处理
- 2、训练文件的处理
- 3、开始训练
- 断线怎么办?
- 1、防掉线措施
- 2、完了还是掉线呀?
- 总结
学习前言
Colab是谷歌提供的一个云学习平台,Very Nice,最近卡不够用了决定去白嫖一波。该博客只会说明如何使用Colab对已有的深度学习仓库进行训练,并不会说如何进入外网、如何注册等。
该博客仅为了演示Colab的使用,主要是为了各位熟悉Colab操作,具体问题具体分析,操作不当与版本更迭会导致步骤出错,如果出错的话建议多百度,多看代码与指令,查一下错误的原因,同时建议是有一定的基础同学再使用Colab
什么是Google Colab
Google Colab是谷歌提供的免费Jupyter 笔记本环境,不需要什么设置与环境配置就可以使用,完全在云端运行。不影响本地的使用。
Google Colab为研究者提供一定免费的GPU,可以编写和执行代码,所有这些都可通过浏览器免费使用。同学们可以在上面轻松地跑 Tensorflow、Pytorch 等深度学习框架。
尽管Google Colab提供了一定的免费资源,但资源量是受限制的,所有 Colab 运行时都会在一段时间后重置。Colab Pro 订阅者的使用量仍会受到限制,但相比非订阅者可享有的限额要多出大约一倍。Colab Pro+ 订阅者还可获享更高的稳定性。
相关链接
Colab官网:https://colab.research.google.com/(需要外网才可以进入)
ipynb Github:https://github.com/bubbliiiing/Colab
利用Colab进行训练
本文以YoloV4-Tiny-Pytorch版本的训练为例,进行Colab的使用演示。
一、数据集与预训练权重的上传
1、数据集的上传
Colab和Google自带的云盘联动非常好,因此我们需要首先将数据集上传云盘,这个上传的过程其实非常简单,本地先准备好数据集。
由于我所上传的库,均使用的VOC数据集,我们需要按照VOC数据集摆放好
本文直接以VOC07+12数据集为例进行演示。

JPEGImages里面存放的为图片文件,Annotations里面存放的标签文件,ImageSets里面存放的是区分验证集、训练集、测试集的txt文件。
然后将VOCdevkit文件整个进行打包。需要注意的是,不是对上面三个文件夹进行打包,而是对VOCdevkit进行打包,这样才满足数据处理的格式。

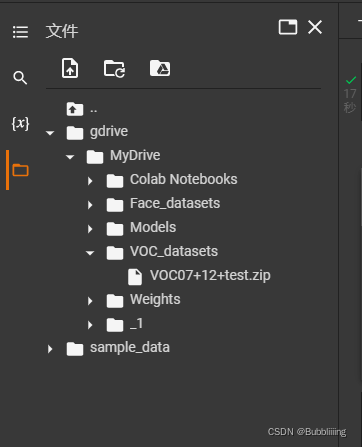
在获得打包后的压缩包后,将压缩包上传到谷歌云盘。我在谷歌云盘上新建了一个VOC_datasets文件夹存放压缩包。

此时数据集的上传已经完成。
2、预训练权重的上传
在谷歌云盘上进行文件夹的创建,首先创建Models,然后在Models里面创建yolov4-tiny-pytorch,然后在yolov4-tiny-pytorch里面创建logs和model_data。
model_data放置的是预训练文件。
logs放置的是网络训练过程中产生的权值。
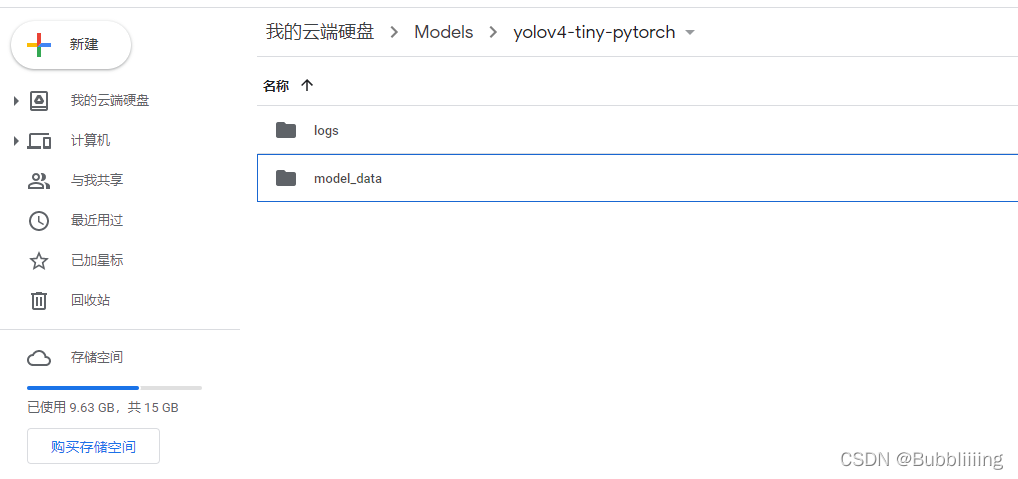
由于我们这次使用的是YoloV4-Tiny-Pytorch的库,我们将它的预训练权重上传到model_data文件夹。

二、打开Colab并配置环境
1、笔记本的创建
在该步中,我们首先打开Colab的官网。
然后点击文件,创建笔记本,此时会创建一个jupyter笔记本。
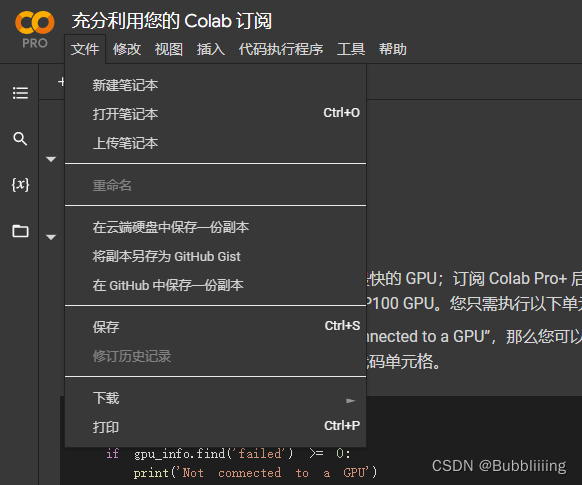
创建完成后给文件改个名,好看一些。

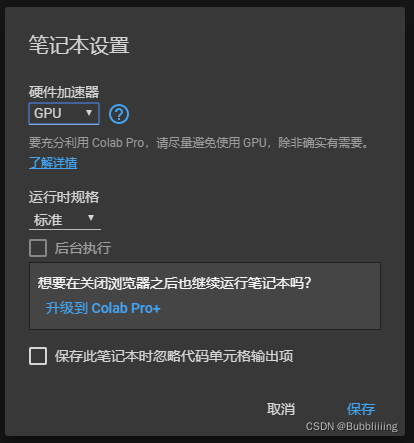
之后点击代码执行程序,然后点击更改运行时类型,在其中硬件加速器部分选择GPU,Colab便会配置一个带有GPU的机器,此时笔记本就创建完成了。

2、环境的简单配置
colab已经集成了pytorch环境,无需专门配置pytorch,不过使用的torch版本较新。
由于我们的数据集在谷歌云盘上,所以我们还要挂载云盘。
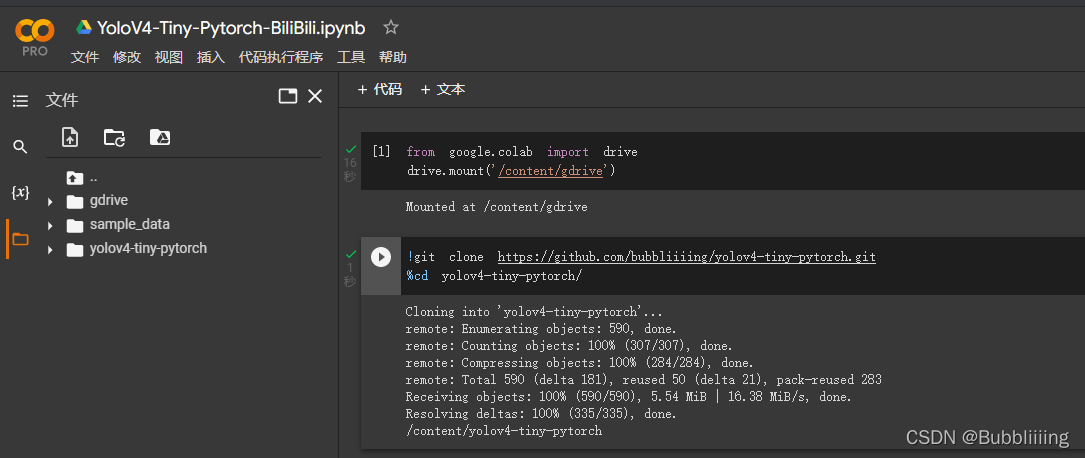
from google.colab import drive
drive.mount('/content/gdrive')
我们将上述代码输入到笔记本中执行。将云盘挂载到服务器上。然后点击运行即可。

此时点击左边栏中,类似于文件夹的东西,就可以打开文件夹了,看看文件部署情况。gdrive就是我们配置的谷歌云盘。没有的话就去左侧刷新一下。

打开gdrive,其中有我们的数据集。
3、深度学习库的下载
这一步,我们需要完成深度学习仓库的下载,我们使用git clone指令进行下载。执行如下指令后,左边的文件中多出了yolov4-tiny-pytorch文件夹。没有的话就去左侧刷新一下。
然后我们通过了cd指令将根目录转移到了yolov4-tiny-pytorch文件夹。
!git clone https://github.com/bubbliiiing/yolov4-tiny-pytorch.git %cd yolov4-tiny-pytorch/
4、数据集的复制与解压
直接将数据集布置在谷歌云盘会导致大量的云盘数据传输,速度远不及本地文件,因此我们需要将数据集复制到本地里进行处理。
我们输入下述代码进行文件的复制与解压。首先执行的是删除指令,将原来的空VOCdevkit文件夹进行删除。然后进行解压。
由于这里使用的是zip文件所以使用的是unzip指令,如果是其它形式的压缩包,需要根据压缩包的格式进行指令的修改(请同学们百度)。执行下述指令后,可以发现,左边的文件中已经解压好了VOC数据集。没有的话就去左侧刷新一下。
!rm -rf ./VOCdevkit !cp /content/gdrive/MyDrive/VOC_datasets/VOC07+12+test.zip ./ !unzip ./VOC07+12+test.zip -d ./

5、保存路径设置
本文提供的代码默认的保存路径为logs文件夹,但Colab存在不稳定的问题,运行一段时间后会发生断线。
如果将权值保存在原始根目录下的logs文件夹,发生断线网络就白训练了,浪费大量的时间。
可以将google云盘软连接到根目录下,那么即使断线,权值也保留在云盘中。
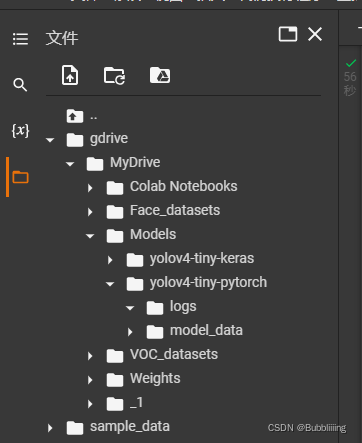
本文之前在云盘中创建了logs文件夹。将该文件夹链接过来。
!rm -rf logs !ln -s /content/gdrive/MyDrive/Models/yolov4-tiny-pytorch/logs logs

三、开始训练
1、标注文件的处理
打开voc_annotation.py文件,由于我们现在使用的直接就是VOC数据集,我们已经划分好了训练集验证集和测试集,所以我们将annotation_mode设置为2。
然后输入指令完成标签的处理,生成2007_train.txt和2007_val.txt。
!python voc_annotation.py

2、训练文件的处理
处理训练文件主要包含三个部分:
1、预训练文件的使用。
2、保存周期的设置,这个设置是因为云盘的存储空间有限,每代都保存会导致存储空间满出。
a、预训练文件的使用
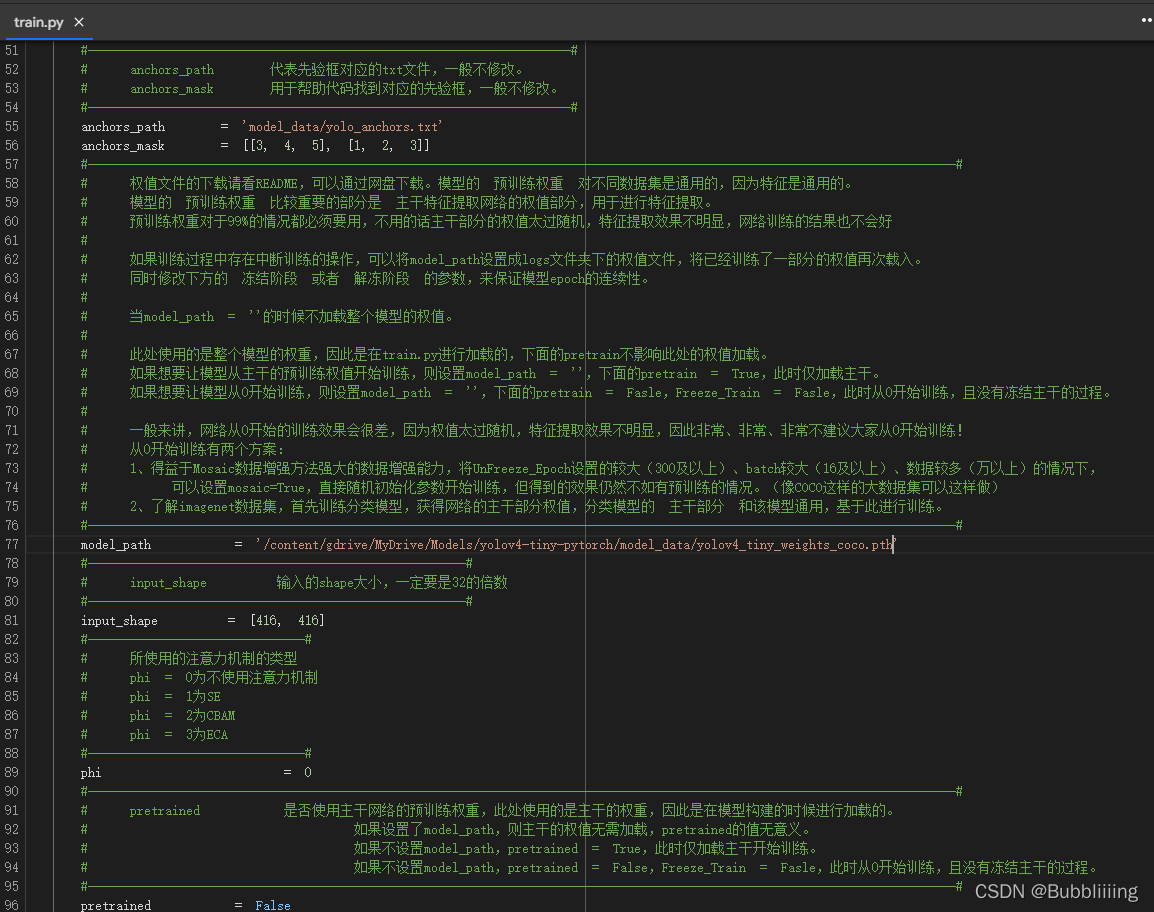
首先修改model_path,指向我们上传到谷歌云盘的权值文件。在左侧文件栏中,找到models/yolov4-tiny-pytorch/model_data,复制权值路径。
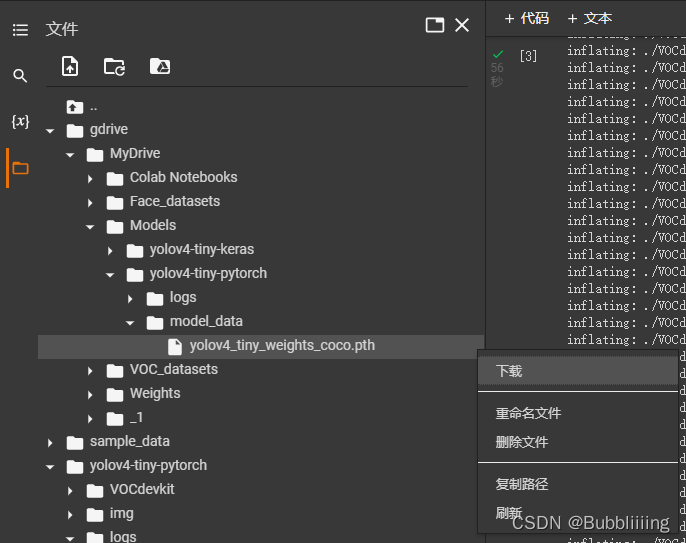
替换右侧的model_path。
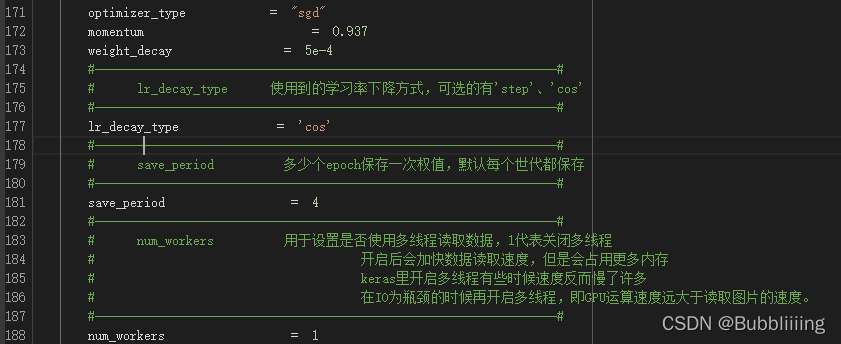
b、保存周期的设置
有一些仓库已经完成了更新,添加了每隔多少世代的保存参数,直接修改save_period既可,在本文中,我们将save_period设置成4,也就是每隔4代保存一次。
还没有更新的仓库只能每一代都保存了,记得偶尔去google云盘删一下。
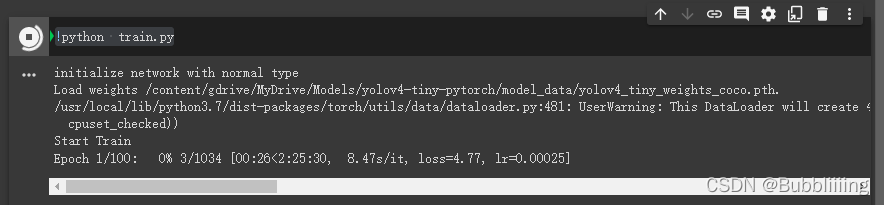
3、开始训练
此时在笔记本里面输入:
!python train.py
即可开始训练。
断线怎么办?
1、防掉线措施
听说可以通过自动点击来减少掉线频率。
在Google colab的按F12,点击网页的控制台,粘贴如下代码:
function ConnectButton(){
console.log("Connect pushed");
document.querySelector("#top-toolbar > colab-connect-button").shadowRoot.querySelector("#connect").click()
}
setInterval(ConnectButton,60000);
2、完了还是掉线呀?
没什么办法,便宜的东西必然有它的坏处。
按照步骤重新来一次,然后将预训练权重设置成logs文件夹里面训练好的权值文件即可。
除此之外,Init_epoch等参数也需要调整。
总结
使用Colab训练比较重要的是处理好路径的关系,找到哪个文件在哪里,文件夹的执行目录在哪里,就可以比较简单的运行起程序了,不过Colab确实存在断线问题,我们需要时刻保存好文件,因此我将权值直接保存在云盘上,这样也不会丢失。
以上就是Pytorch 使用Google Colab训练神经网络深度学习的详细内容,更多关于Pytorch训练Google Colab神经网络的资料请关注我们其它相关文章!
相关推荐
-

Python深度学习pytorch神经网络多层感知机简洁实现
我们可以通过高级API更简洁地实现多层感知机. import torch from torch import nn from d2l import torch as d2l 模型 与softmax回归的简洁实现相比,唯一的区别是我们添加了2个全连接层.第一层是隐藏层,它包含256个隐藏单元,并使用了ReLU激活函数.第二层是输出层. net = nn.Sequential(nn.Flatten(), nn.Linear(784, 256), nn.ReLU(), nn.Linear(256, 1
-
Python Pytorch深度学习之神经网络
目录 一.简介 二.神经网络训练过程 2.通过调用net.parameters()返回模型可训练的参数 3.迭代整个输入 4.调用反向传播 5.计算损失值 6.反向传播梯度 7.更新神经网络参数 总结 一.简介 神经网络可以通过torch.nn包构建,上一节已经对自动梯度有些了解,神经网络是基于自动梯度来定义一些模型.一个nn.Module包括层和一个方法,它会返回输出.例如:数字图片识别的网络: 上图是一个简单的前回馈神经网络,它接收输入,让输入一个接着一个通过一些层,最后给出输出. 二.神经
-
Python深度学习之Pytorch初步使用
一.Tensor Tensor(张量是一个统称,其中包括很多类型): 0阶张量:标量.常数.0-D Tensor:1阶张量:向量.1-D Tensor:2阶张量:矩阵.2-D Tensor:-- 二.Pytorch如何创建张量 2.1 创建张量 import torch t = torch.Tensor([1, 2, 3]) print(t) 2.2 tensor与ndarray的关系 两者之间可以相互转化 import torch import numpy as np t1 = np.arra
-
PyTorch的深度学习入门教程之构建神经网络
前言 本文参考PyTorch官网的教程,分为五个基本模块来介绍PyTorch.为了避免文章过长,这五个模块分别在五篇博文中介绍. Part3:使用PyTorch构建一个神经网络 神经网络可以使用touch.nn来构建.nn依赖于autograd来定义模型,并且对其求导.一个nn.Module包含网络的层(layers),同时forward(input)可以返回output. 这是一个简单的前馈网络.它接受输入,然后一层一层向前传播,最后输出一个结果. 训练神经网络的典型步骤如下: (1) 定义
-
Python Pytorch深度学习之核心小结
目录 一.Numpy实现网络 二.Pytorch:Tensor 三.自动求导 1.PyTorch:Tensor和auto_grad 总结 Pytorch的核心是两个主要特征: 1.一个n维tensor,类似于numpy,但是tensor可以在GPU上运行 2.搭建和训练神经网络时的自动微分/求导机制 一.Numpy实现网络 在总结Tensor之前,先使用numpy实现网络.numpy提供了一个n维数组对象,以及许多用于操作这些数组的函数. import numpy as np # n是批量大小,
-
Pytorch 使用Google Colab训练神经网络深度学习
目录 学习前言 什么是Google Colab 相关链接 利用Colab进行训练 一.数据集与预训练权重的上传 1.数据集的上传 2.预训练权重的上传 二.打开Colab并配置环境 1.笔记本的创建 2.环境的简单配置 3.深度学习库的下载 4.数据集的复制与解压 5.保存路径设置 三.开始训练 1.标注文件的处理 2.训练文件的处理 3.开始训练 断线怎么办? 1.防掉线措施 2.完了还是掉线呀? 总结 学习前言 Colab是谷歌提供的一个云学习平台,Very Nice,最近卡不够用了决定去白
-
Pytorch深度学习经典卷积神经网络resnet模块训练
目录 前言 一.resnet 二.resnet网络结构 三.resnet18 1.导包 2.残差模块 2.通道数翻倍残差模块 3.rensnet18模块 4.数据测试 5.损失函数,优化器 6.加载数据集,数据增强 7.训练数据 8.保存模型 9.加载测试集数据,进行模型测试 四.resnet深层对比 前言 随着深度学习的不断发展,从开山之作Alexnet到VGG,网络结构不断优化,但是在VGG网络研究过程中,人们发现随着网络深度的不断提高,准确率却没有得到提高,如图所示: 人们觉得深度学习到此
-
Python深度学习pytorch卷积神经网络LeNet
目录 LeNet 模型训练 在本节中,我们将介绍LeNet,它是最早发布的卷积神经网络之一.这个模型是由AT&T贝尔实验室的研究院Yann LeCun在1989年提出的(并以其命名),目的是识别手写数字.当时,LeNet取得了与支持向量机性能相媲美的成果,成为监督学习的主流方法.LeNet被广泛用于自动取款机中,帮助识别处理支票的数字. LeNet 总体来看,LeNet(LeNet-5)由两个部分组成: 卷积编码器: 由两个卷积层组成 全连接层密集快: 由三个全连接层组成 每个卷积块中的基本单元
-
Python深度学习理解pytorch神经网络批量归一化
目录 训练深层网络 为什么要批量归一化层呢? 批量归一化层 全连接层 卷积层 预测过程中的批量归一化 使用批量归一化层的LeNet 简明实现 争议 训练深层神经网络是十分困难的,特别是在较短的实践内使他们收敛更加棘手.在本节中,我们将介绍批量归一化(batch normalization),这是一种流行且有效的技术,可持续加速深层网络的收敛速度.在结合之后将介绍的残差快,批量归一化使得研究人员能够训练100层以上的网络. 训练深层网络 为什么要批量归一化层呢? 让我们回顾一下训练神经网络时出现的
-
Python深度学习pytorch神经网络Dropout应用详解解
目录 扰动的鲁棒性 实践中的dropout 简洁实现 扰动的鲁棒性 在之前我们讨论权重衰减(L2正则化)时看到的那样,参数的范数也代表了一种有用的简单性度量.简单性的另一个有用角度是平滑性,即函数不应该对其输入的微笑变化敏感.例如,当我们对图像进行分类时,我们预计向像素添加一些随机噪声应该是基本无影响的. dropout在正向传播过程中,计算每一内部层同时注入噪声,这已经成为训练神经网络的标准技术.这种方法之所以被称为dropout,因为我们从表面上看是在训练过程中丢弃(drop out)一些
-
Python深度学习pytorch神经网络图像卷积运算详解
目录 互相关运算 卷积层 特征映射 由于卷积神经网络的设计是用于探索图像数据,本节我们将以图像为例. 互相关运算 严格来说,卷积层是个错误的叫法,因为它所表达的运算其实是互相关运算(cross-correlation),而不是卷积运算.在卷积层中,输入张量和核张量通过互相关运算产生输出张量. 首先,我们暂时忽略通道(第三维)这一情况,看看如何处理二维图像数据和隐藏表示.下图中,输入是高度为3.宽度为3的二维张量(即形状为 3 × 3 3\times3 3×3).卷积核的高度和宽度都是2. 注意,
-
Python深度学习pytorch神经网络块的网络之VGG
目录 VGG块 VGG网络 训练模型 与芯片设计中工程师从放置晶体管到逻辑元件再到逻辑块的过程类似,神经网络结构的设计也逐渐变得更加抽象.研究人员开始从单个神经元的角度思考问题,发展到整个层次,现在又转向模块,重复各层的模式. 使用块的想法首先出现在牛津大学的视觉几何组(visualgeometry Group)(VGG)的VGG网络中.通过使用循环和子程序,可以很容易地在任何现代深度学习框架的代码中实现这些重复的结构. VGG块 经典卷积神经网络的基本组成部分是下面的这个序列: 1.带填充以保
-
Python深度学习pytorch神经网络填充和步幅的理解
目录 填充 步幅 上图中,输入的高度和宽度都为3,卷积核的高度和宽度都为2,生成的输出表征的维度为 2 × 2 2\times2 2×2.从上图可看出卷积的输出形状取决于输入形状和卷积核的形状. 填充 以上面的图为例,在应用多层卷积时,我们常常丢失边缘像素. 解决这个问题的简单方法即为填充(padding):在输入图像的边界填充元素(通常填充元素是0). 例如,在上图中我们将 3 × 3 3\times3 3×3输入填充到 5 × 5 5\times5 5×5,那么它的输出就增加为 4 × 4