python计算机视觉opencv矩形轮廓顶点位置确定
目录
- 一、问题的引入
- 二、问题的解决方法
- 方法一:
- 方法二
- 三、一些实现代码
一、问题的引入
opencv在图像处理方面有着非常强大的功能,当我们需要使用opencv进行一些图像的矫正工作时,我们通常需要找到原图的一些关键点,然后计算变换后的图像坐标,最后通过仿射变换或者透视变换获得自己想要的矫正图像,比如将一张拍歪了的纸进行矫正,我们的首要任务就是找到原图的一些关键点,通常的做法就是找纸张的4个顶点。
二、问题的解决方法
第一步我们肯定要找到纸张相应的矩形轮廓,这里可以二值化再找,也可以使用一些算子查找,而本文的重点是解决怎样根据矩形轮廓去确定它具体的4个顶点的位置。
方法一:
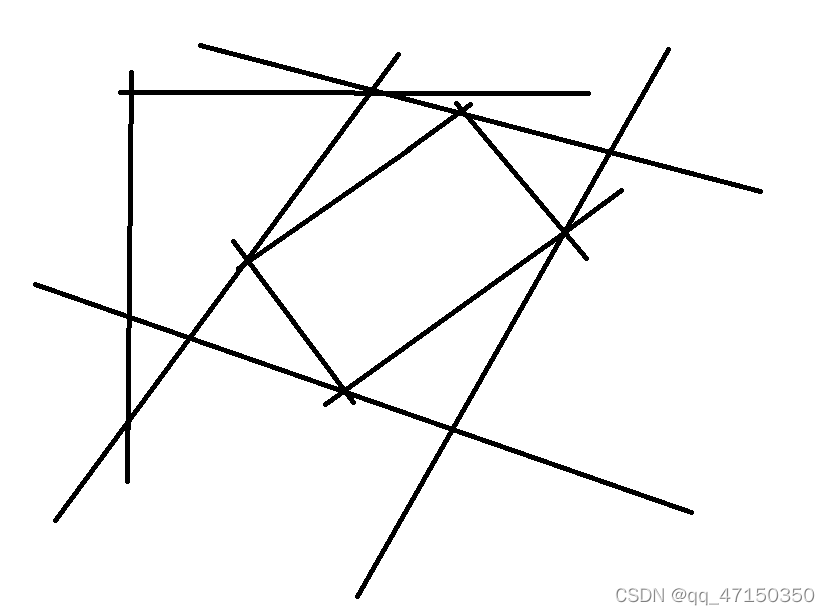
使用线性规划的方法,在opencv的坐标系下使用x+y=z1和x-y=z2两条直线去切轮廓,分别当z1取最大时(x,y)是右下点,最小时是左上点;当z2取最大时(x,y)是右上点,最小时是左下点,如下图:

这个方法单独从轮廓的角度来说,只要旋转的角度不要刚刚好是45°或者135°,这个方法就没有问题,它得到的就是轮廓相对应的右下点、左上点、右上点、左下点,但不是原目标的相应点,就好像当纸张旋转超过45°时,这个方法得到的对于轮廓来说是正确的,但对于纸张来说就不对了,如下图:
这个时候如果按之前的一样进行矫正就会得到一个横放的纸张,这样里面的字都是横的,就不是我们想要的了所以这个方法要用来矫正的话,就需要对图像的旋转角度有一个计算和判断,可以通过下面代码获取角度:
#cnt:输入轮廓,angle:返回角度 (x,y),(MA,ma),angle = cv2.fitEllipse(cnt)
方法二
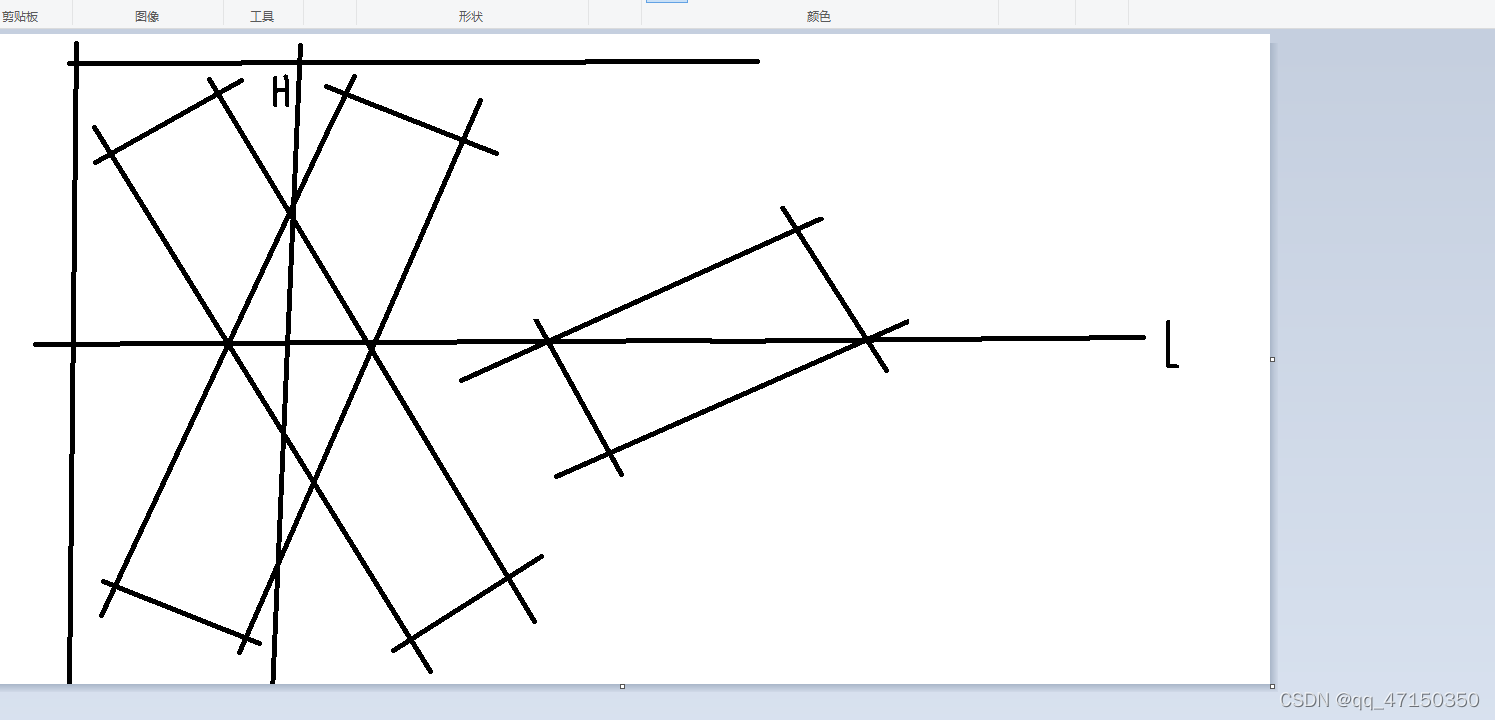
这个方法首先要使用轮廓获得其最小面积矩,然后观察研究矩形的性质可以根据当前的形状给出适合的x,y判断式,观察下图:
#找轮廓最小矩 cnt:轮廓 box:4个点无规律 rect = cv2.minAreaRect(cnt) box = cv2.boxPoints(rect)
对于这样一个高比宽长的矩形,我们的方法是先将4个点按y从小到大进行排序,再取前两个按x从小到大进行排序,小的那个是左下,大的那个是右下;最后取后两个也按x从小到大进行排序,小的那个是左上,大的那个是右上。假如是一个宽比高长的矩形,我们就可以先按x的大小进行排序。这个从代码角度实现可能更为简洁,适用特定轮廓,对角度要求就更宽泛了些,除非旋转到了像上图右边一样的状况,而这种矫正一般出现的机率非常小。
三、一些实现代码
1、下面是使用方法一实现的顶点定位
import numpy as np
import cv2
def get4points(img: np.ndarray, thed, n):
"""
:param img the color image which shape is [height, width, depth]
:return 4 point locations in list or tuple, for example: [[x1, y1], [x2, y2], [x3, y3], [x4, y4]]
"""
#灰度和二值化
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,thed,255,cv2.THRESH_BINARY)
# 搜索轮廓
contours, hierarchy = cv2.findContours(
binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#按轮廓长度选取需要轮廓
len_list = []
for i in range(len(contours)):
len_list.append(len(contours[i]))
#选第二长的
sy = np.argsort(np.array(len_list))[-n]
#寻找顶点
sum_list = []
dif_list = []
for i in contours[sy]:
sum = i[0][0]+i[0][1]
sum_list.append(sum)
dif_list.append(i[0][0]-i[0][1])
id_lb = np.argsort(np.array(sum_list))
id_lb2 = np.argsort(np.array(dif_list))
lu_id , rd_id = id_lb[0] , id_lb[-1]
ld_id , ru_id = id_lb2[0] , id_lb2[-1]
points = np.array([contours[sy][lu_id][0],contours[sy][rd_id][0],contours[sy][ld_id][0],contours[sy][ru_id][0]])
return points , contours , sy
2、下面是使用方法2实现的顶点定位
def getpoints(binary: np.ndarray , num: int ):
# 搜索轮廓
contours, hierarchy = cv2.findContours(
binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
#按轮廓位置最左(x最小)选取
x_list = []
for i in contours:
x_sum = 0
for kk in i:
x_sum += kk[0][0]
x_av = x_sum/len(i)
x_list.append(x_av)
sy = np.argsort(np.array(x_list))[num]
cnt = contours[sy]
#找轮廓最小矩
rect = cv2.minAreaRect(cnt)
box = cv2.boxPoints(rect)
return box , contours , sy
def findpoints(points):
#区分矩形顶点位置
point_y=sorted(points,key=lambda t:t[1])
lu, ru =sorted(point_y[:2],key=lambda t:t[0])
ld, rd =sorted(point_y[2:],key=lambda t:t[0])
return [list(lu), list(ld), list(ru),list(rd)]
3、下面是一些展示代码
#展示顶点
def show_points(img , points):
point_size = 8
point_color = (0, 0, 255) # BGR
thickness = 4 # 可以为 0 、4、8
points_list = [tuple(i) for i in np.int32(points).reshape(-1,2)]
for point in points_list:
cv2.circle(img, point, point_size, point_color, thickness)
img = cv2.resize(img,(808,808))
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# cv2.imwrite('dd.jpg',img)
#展示轮廓
def show_Contour(img , contours , sy):
cv2.drawContours(img, contours , sy , (25, 254, 0), 4)
img = cv2.resize(img,(808,808))
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# cv2.imwrite('mm.jpg',img)
以上就是python计算机视觉opencv矩形轮廓顶点位置确定的详细内容,更多关于python opencv矩形轮廓顶点定位的资料请关注我们其它相关文章!
相关推荐
-
OpenCV 轮廓检测的实现方法
轮廓概述 轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度.轮廓在形状分析和物体的检测和识别中很有用. 为了更加准确,要使用二值化图像.在寻找轮廓之前,要进行阈值化处理或者 Canny 边界检测. 查找轮廓的函数会修改原始图像.如果你在找到轮廓之后还想使用原始图像的话,你应该将原始图像存储到其他变量中. 在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体,要找的物体应该是白色而背景应该是黑色. 轮廓检测的作用: 1.可以检测图图像或者视频中物体的轮廓 2.计算
-

Python基于opencv的简单图像轮廓形状识别(全网最简单最少代码)
可以直接跳到最后整体代码看一看是不是很少的代码!!!! 思路: 1. 数据的整合 2. 图片的灰度转化 3. 图片的二值转化 4. 图片的轮廓识别 5. 得到图片的顶点数 6. 依据顶点数判断图像形状 一.原数据的展示 图片文件共36个文件夹,每个文件夹有100张图片,共3600张图片. 每一个文件夹里都有形同此类的图形 二.数据的整合 对于多个文件夹,分析起来很不方便,所有决定将其都放在一个文件夹下进行分析,在python中具体实现如下: 本次需要的包 import cv2 import os
-
python+opencv实现车牌定位功能(实例代码)
写在前面 HIT大三上学期视听觉信号处理课程中视觉部分的实验三,经过和学长们实验的对比发现每一级实验要求都不一样,因此这里标明了是2019年秋季学期的视觉实验三. 由于时间紧张,代码没有进行任何优化,实验算法仅供参考. 实验要求 对给定的车牌进行车牌识别 实验代码 代码首先贴在这里,仅供参考 源代码 实验代码如下: import cv2 import numpy as np def lpr(filename): img = cv2.imread(filename) # 预处理,包括灰度处理,高斯
-
OpenCV半小时掌握基本操作之图像轮廓
目录 概述 图像轮廓 绘制轮廓 轮廓特征 轮廓近似 边界矩形 外接圆 [OpenCV]⚠️高手勿入! 半小时学会基本操作 ⚠️ 图像轮廓 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 图像轮廓 cv2.findContours可以帮助我们查找轮廓. 格式: cv2.findContours(image, mode, method, contours=None, hierarchy=None, offset=Non
-
OpenCV-Python图像轮廓之轮廓特征详解
目录 前言 一.轮廓的矩 二.轮廓的面积 三.轮廓的长度 四.轮廓的近似多边形 五.轮廓的凸包 六.轮廓的直边界矩形 七.轮廓的旋转矩形 八.轮廓的最小外包圆 九.轮廓的拟合椭圆 十.轮廓的拟合直线 十一.轮廓的最小外包三角形 前言 图像轮廓是指由位于边缘.连续的.具有相同颜色和强度的点构成的曲线,它可以用于形状分析以及对象检测和识别. 一.轮廓的矩 轮廓的矩包含了轮廓的各种几何特征,如面积.位置.角度.形状等.cv2.moments()函数用于返回轮廓的矩,其基本格式如下: ret = cv2
-
python计算机视觉opencv矩形轮廓顶点位置确定
目录 一.问题的引入 二.问题的解决方法 方法一: 方法二 三.一些实现代码 一.问题的引入 opencv在图像处理方面有着非常强大的功能,当我们需要使用opencv进行一些图像的矫正工作时,我们通常需要找到原图的一些关键点,然后计算变换后的图像坐标,最后通过仿射变换或者透视变换获得自己想要的矫正图像,比如将一张拍歪了的纸进行矫正,我们的首要任务就是找到原图的一些关键点,通常的做法就是找纸张的4个顶点. 二.问题的解决方法 第一步我们肯定要找到纸张相应的矩形轮廓,这里可以二值化再找,也可以使用一
-
python计算机视觉opencv图像金字塔轮廓及模板匹配
目录 1.图像金字塔 ①高斯金字塔 ②拉普拉斯金字塔 2.图像轮廓 ①寻找轮廓 ②轮廓特征 ③轮廓绘制 3.模板匹配 ①模板匹配 ②匹配框线绘制 ③多对象匹配 4.直方图统计 ①直方图绘制 ②直方图统计 ③直方图的mask操作 ④直方图均衡化 5.傅里叶变换 1.图像金字塔 ①高斯金字塔 向下采样,数据会越来越少,减少的方式是:将偶数行和列删除 向上采样,数据会越来越多,将图像在每个方向上扩大为原来的两倍,新增的行和列用0来填充.使用先前同样的内核与放大后的图像卷积,获得近似值. 上采样之后,图
-
python计算机视觉opencv卡号识别示例详解
目录 一.模板预处理 1.将模板设置为二值图 2.检测模板的轮廓 3.对模板轮廓排序,并将数字和轮廓一一对应,以字典存储 4.备注 二.图片预处理 1.初始化卷积核 2.图片预处理第一部分 3.图像预处理第二部分 三.轮廓处理 1.大轮廓过滤 2.小轮廓分割 模板图片如下: 需识别的图片如下: 一.模板预处理 1.将模板设置为二值图 2.检测模板的轮廓 3.对模板轮廓排序,并将数字和轮廓一一对应,以字典存储 排序的函数如下: 排序并存储: 4.备注 ①每一个数字对应的是二值图截出来的那个数字图的
-
python计算机视觉OpenCV入门讲解
目录 前言 一.什么是计算机视觉 二.图片处理基础操作 图片处理:读入图像 图片处理:显示图像 图片处理:图像保存 三.图像处理入门基础 图像成像原理介绍 图像分类 四.灰度图像 五.彩色图像(RGB) 六.像素处理操作 读取像素 修改像素 使用python中的numpy修改像素点 七.获取图像属性 形状 像素数目 图像类型 八.图像ROI 九.通道的拆分与合并 拆分 合并 前言 本专栏将非常细致的讲解相关与计算机视觉OpenCV的相关知识即操作,非常的简单易懂.本文主要讲解相关与计算机视觉的相
-
python计算机视觉OpenCV库实现实时摄像头人脸检测示例
目录 设备准备: 实现过程 调用模型库文件 打开摄像头 人脸检测 设置退出机制 程序运行 全部代码 OpenCV 是一个C++库,目前流行的计算机视觉编程库,用于实时处理计算机视觉方面的问题,它涵盖了很多计算机视觉领域的模块.在Python中常使用OpenCV库实现图像处理. 本文将介绍如何在Python3中使用OpenCV实现实时摄像头人脸检测: 设备准备: USB摄像头 接入PC电脑USB口,并调试正常打开视频.如果电脑内置了电脑摄像头,测试一下摄像头能否正常使用. 下载特征分类模型: XM
-
Python使用Opencv实现边缘检测以及轮廓检测的实现
边缘检测 Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化. Canny边缘检测器算法基本步骤: 平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声. 计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直.水平和斜对角.这一步的输出用于在下一步中计算真正的边缘. 非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于
-
Python实现图片查找轮廓、多边形拟合、最小外接矩形代码
1.概述 经常用到轮廓查找和多边形拟合等opencv操作,因此记录以备后续使用.本文代码中的阈值条件对图片没有实际意义,仅仅是为了测试. 原图为: 2.测试代码: import cv2 import numpy as np img = cv2.imread('/home/yasin/coffe.jpg') img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) _, contours, hierarchy = cv2.findContours(img_g
-
基于python使用OpenCV进行物体轮廓排序
目录 1 引言 2 栗子 2.1 读取图像 2.2 获取轮廓 2.3 轮廓排序 2.4 其他结果 3 总结 1 引言 在进行图像处理过程中,我们经常会遇到一些和物体轮廓相关的操作,比如求目标轮廓的周长面积等,我们直接使用Opencv的findContours函数可以很容易的得到每个目标的轮廓,但是可视化后, 这个次序是无序的,如下图左侧所示: 本节打算实现对物体轮廓进行排序,可以实现从上到下排序或者从左倒右排序,达到上图右侧的可视化结果. 2 栗子 2.1 读取图像 首先,我们来读取图像,并得到
-
Python通过OpenCV的findContours获取轮廓并切割实例
1 获取轮廓 OpenCV2获取轮廓主要是用cv2.findContours import numpy as np import cv2 im = cv2.imread('test.jpg') imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours, hierarchy = cv2.findContours(thresh,cv2.RETR_T