Python3利用Dlib19.7实现摄像头人脸识别的方法
0.引言
利用python开发,借助Dlib库捕获摄像头中的人脸,提取人脸特征,通过计算欧氏距离来和预存的人脸特征进行对比,达到人脸识别的目的;
可以自动从摄像头中抠取人脸图片存储到本地,然后提取构建预设人脸特征;
根据抠取的 / 已有的同一个人多张人脸图片提取128D特征值,然后计算该人的128D特征均值;
然后和摄像头中实时获取到的人脸提取出的特征值,计算欧氏距离,判定是否为同一张人脸;
人脸识别 / face recognition的说明:
wikipedia 关于人脸识别系统 / face recognition system 的描述:theywork by comparing selected facial featuresfrom given image with faces within a database.
本项目中就是比较 预设的人脸的特征和 摄像头实时获取到的人脸的特征;
核心就是提取128D人脸特征,然后计算摄像头人脸特征和预设的特征脸的欧式距离,进行比对;
效果如下(摄像头认出来我是default_person预设的人脸 / 另一个人不是预设人脸显示diff):
图1 摄像头人脸识别效果gif
1.总体流程
先说下 人脸检测 (face detection) 和 人脸识别 (face recognition) ,前者是达到检测出场景中人脸的目的就可以了,而后者不仅需要检测出人脸,还要和已有人脸数据进行比对,识别出是否在数据库中,或者进行身份标注之类处理,人脸检测和人脸识别两者有时候可能会被理解混淆;
我的之前一些项目都是用dlib做人脸检测这块,这个项目想要实现的功能是人脸识别功能,借助的是 dlib官网中 face_recognition.py这个例程 (link:http://dlib.net/face_recognition.py.html);
核心在于 利用 “dlib_face_recognition_resnet_model_v1.dat” 这个model,提取人脸图像的128D特征,然后比对不同人脸图片的128D特征,设定阈值计算欧氏距离来判断是否为同一张脸;
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
shape = predictor(img, dets[0])
face_descriptor = facerec.compute_face_descriptor(img, shape)
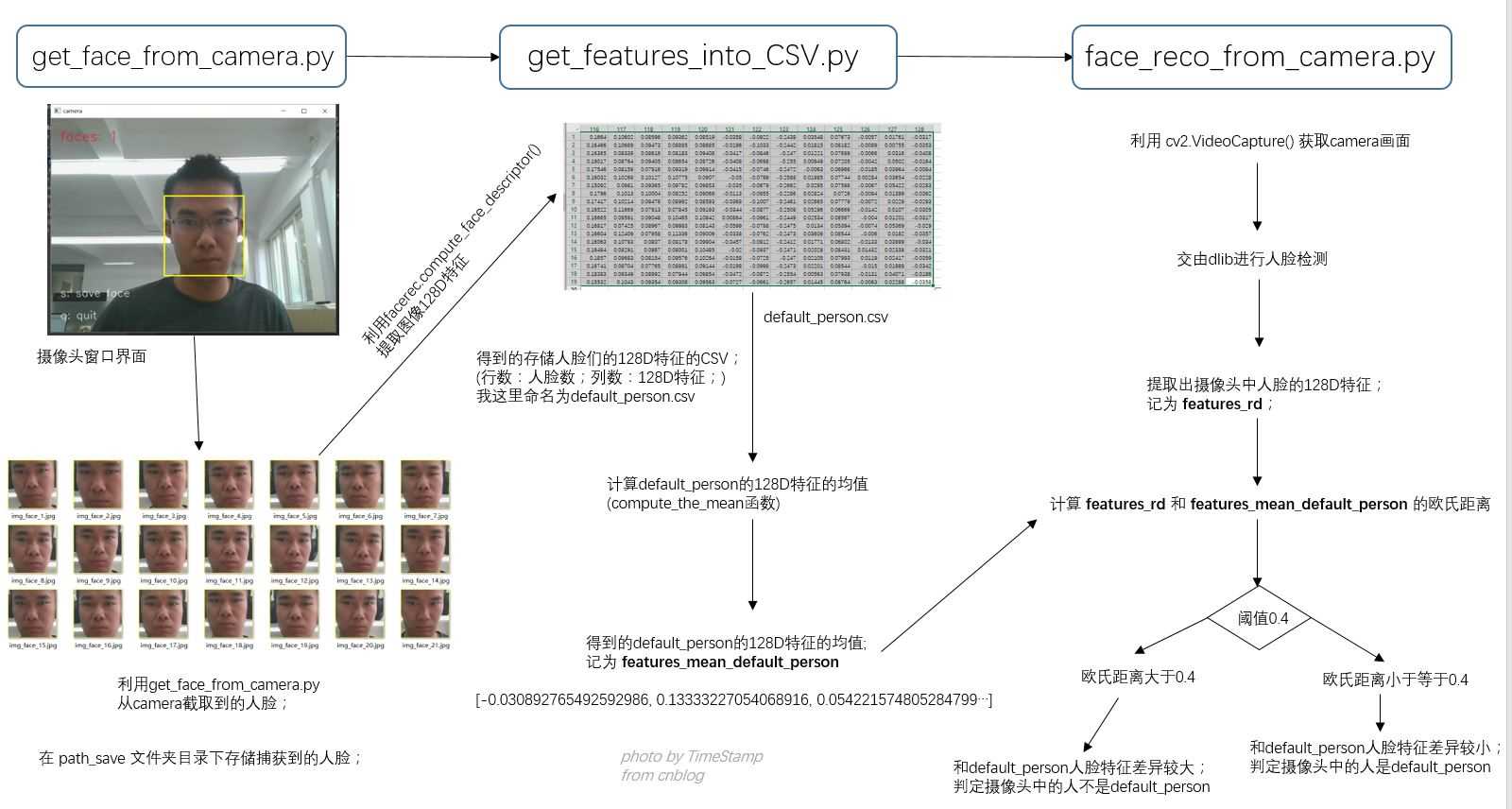
图2 总体设计流程
2.源码介绍
主要有
- get_face_from_camera.py ,
- get_features_into_CSV.py,
- face_reco_from_camera.py
这三个py文件;
2.1get_face_from_camera.py / 采集构建XXX人脸数据
人脸识别需要将 提取到的图像数据 和已有图像数据进行比对分析,所以这个py文件实现的功能就是采集构建XXX的人脸数据;
程序会生成一个窗口,显示调用的摄像头实时获取的图像(关于摄像头的调用方式可以参考我的另一博客http://www.jb51.net/article/135512.htm);
按s键可以保存当前视频流中的人脸图像,保存的路径由 path_save = “xxxx/get_from_camera/” 规定;
按q键退出窗口;
摄像头的调用是利用opencv库的cv2.VideoCapture(0), 此处参数为0代表调用的是笔记本的默认摄像头,你也可以让它调用传入已有视频文件;
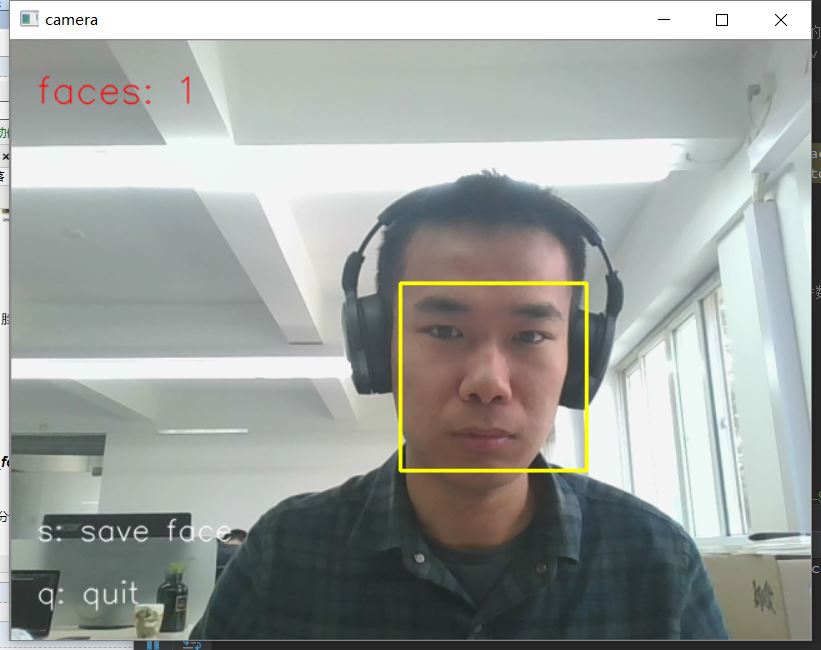
图3get_face_from_camera.py 的界面
这样的话,你就可以在 path_save指定的目录下得到一组捕获到的人脸;

图4 捕获到的一组人脸
源码如下:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
import dlib # 人脸识别的库dlib
import numpy as np # 数据处理的库numpy
import cv2 # 图像处理的库OpenCv
# dlib预测器
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
# 创建cv2摄像头对象
cap = cv2.VideoCapture(0)
# cap.set(propId, value)
# 设置视频参数,propId设置的视频参数,value设置的参数值
cap.set(3, 480)
# 截图screenshoot的计数器
cnt_ss = 0
# 人脸截图的计数器
cnt_p = 0
# 保存
path_save = "F:/code/python/P_dlib_face_reco/data/get_from_camera/"
# cap.isOpened() 返回true/false 检查初始化是否成功
while cap.isOpened():
# cap.read()
# 返回两个值:
# 一个布尔值true/false,用来判断读取视频是否成功/是否到视频末尾
# 图像对象,图像的三维矩阵q
flag, im_rd = cap.read()
# 每帧数据延时1ms,延时为0读取的是静态帧
kk = cv2.waitKey(1)
# 取灰度
img_gray = cv2.cvtColor(im_rd, cv2.COLOR_RGB2GRAY)
# 人脸数rects
rects = detector(img_gray, 0)
# print(len(rects))
# 待会要写的字体
font = cv2.FONT_HERSHEY_SIMPLEX
if (len(rects) != 0):
# 检测到人脸
# 矩形框
for k, d in enumerate(rects):
# 计算矩形大小
# (x,y), (宽度width, 高度height)
pos_start = tuple([d.left(), d.top()])
pos_end = tuple([d.right(), d.bottom()])
# 计算矩形框大小
height = d.bottom() - d.top()
width = d.right() - d.left()
# 根据人脸大小生成空的图像
im_blank = np.zeros((height, width, 3), np.uint8)
im_rd = cv2.rectangle(im_rd, tuple([d.left(), d.top()]), tuple([d.right(), d.bottom()]), (0, 255, 255), 2)
im_blank = np.zeros((height, width, 3), np.uint8)
# 保存人脸到本地
if (kk == ord('s')):
cnt_p += 1
for ii in range(height):
for jj in range(width):
im_blank[ii][jj] = im_rd[d.top() + ii][d.left() + jj]
print(path_save + "img_face_" + str(cnt_p) + ".jpg")
cv2.imwrite(path_save + "img_face_" + str(cnt_p) + ".jpg", im_blank)
cv2.putText(im_rd, "faces: " + str(len(rects)), (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
else:
# 没有检测到人脸
cv2.putText(im_rd, "no face", (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
# 添加说明
im_rd = cv2.putText(im_rd, "s: save face", (20, 400), font, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
im_rd = cv2.putText(im_rd, "q: quit", (20, 450), font, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
# 按下q键退出
if (kk == ord('q')):
break
# 窗口显示
cv2.imshow("camera", im_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
2.2get_features_into_CSV.py / 提取特征存入CSV
已经得到了XXX的一组人脸图像,现在就需要把他的面部特征提取出来;
这里借助 dlib 库的 face recognition model 人脸识别模型;
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# detector to find the faces
detector = dlib.get_frontal_face_detector()
# shape predictor to find the face landmarks
predictor = dlib.shape_predictor("shape_predictor_5_face_landmarks.dat")
# 读取图片
img = io.imread(path_img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dets = detector(img_gray, 1)
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
我们可以看下对于某张图片,face_descriptor的输出结果:
绿色框内是我们的返回128D特征的函数;
在红色框内调用该函数来计算img_face_13.jpg;
可以看到黄色框中的输出为128D的向量;
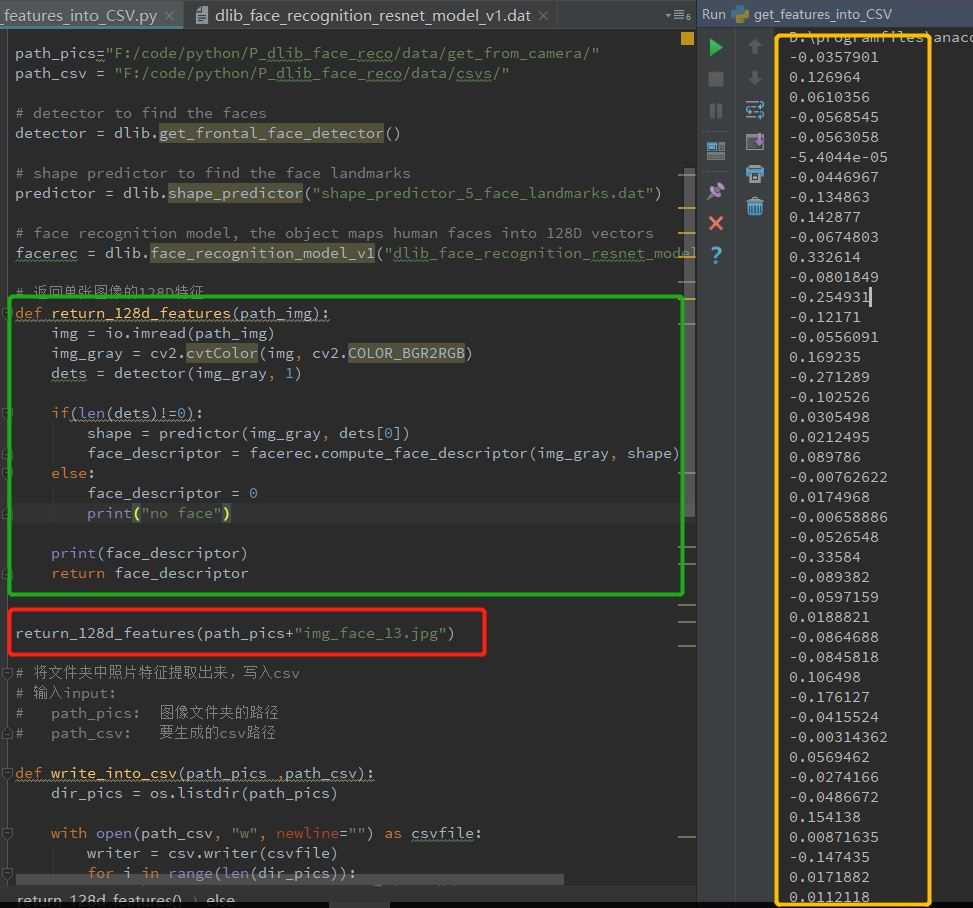
图5 返回单张图像的128D特征的计算结果
所以我们就可以把path_save中的图像,进行批量的特征计算,然后写入CSV中(利用 write_into_CSV函数),我这边csv的命名为default_person.csv;
就可以得到行数(人脸数)*128列的一个特征CSV;
这是某个人的人脸特征,然后计算128D特征的均值,求mean(利用 compute_the_mean函数)
运行的输出结果,这个128D的特征值,就是default_person的特征;
也就是我们内置/预设的人脸,之后摄像头捕获的人脸将要拿过来和这个特征值进行比对,进行人脸识别的处理;
[-0.030892765492592986, 0.13333227054068916, 0.054221574805284799, -0.050820438289328626, -0.056331159841073189, 0.0039378538311116004, -0.044465327145237675, -0.13096490031794497, 0.14215188983239627, -0.084465635842398593, 0.34389359700052363, -0.062936659118062566, -0.24372901571424385, -0.13270603316394905, -0.0472818422866495, 0.15475224742763921, -0.24415240554433121, -0.11213862150907516, 0.032288033417180964, 0.023676671577911628, 0.098508275653186594, -0.010117797634417289, 0.0048202000815715448, -0.014808513420192819, -0.060100053486071135, -0.34934839135722112, -0.095795629448012301, -0.050788544706608117, 0.032316677762489567, -0.099673464894294739, -0.080181991975558434, 0.096361607705291952, -0.1823408101734362, -0.045472671817007815, -0.0066827326326778062, 0.047393877549391041, -0.038414973079373964, -0.039067085930391363, 0.15961966781239761, 0.0092458106136243598, -0.16182226570029007, 0.026322136191945327, -0.0039144184832510193, 0.2492692768573761, 0.19180528427425184, 0.022950534855848866, -0.019220497949342979, -0.15331173021542399, 0.047744840089427795, -0.17038608616904208, 0.026140184680882254, 0.19366614363695445, 0.066497623724372762, 0.07038829416820877, -0.0549700813073861, -0.11961311768544347, -0.032121153940495695, 0.083507449611237169, -0.14934051350543373, 0.011458799806668571, 0.10686114273573223, -0.10744074888919529, -0.04377919611962218, -0.11030520381111848, 0.20804878441910996, 0.093076545941202266, -0.11621182490336268, -0.1991656830436305, 0.10751579348978244, -0.11251544991606161, -0.12237925866716787, 0.058218707869711672, -0.15829276019021085, -0.17670038891466042, -0.2718416170070046, 0.034569320955166689, 0.30443575821424784, 0.061833358712886512, -0.19622498672259481, 0.011373612000361868, -0.050225612756453063, -0.036157087079788507, 0.12961127491373764, 0.13962576616751521, -0.0074232793168017737, 0.020964263007044792, -0.11185114399382942, 0.012502493042694894, 0.17834208513561048, -0.072658227462517586, -0.041312719401168194, 0.25095899873658228, -0.056628625839948654, 0.10285118379090961, 0.046701753217923012, 0.042323612264896691, 0.0036216247826814651, 0.066720707440062574, -0.16388990533979317, -0.0193739396421925, 0.027835704435251261, -0.086023958105789985, -0.05472404568603164, 0.14802298341926776, -0.10644183582381199, 0.098863413851512108, 0.00061285014778963834, 0.062096107555063146, 0.051960245755157973, -0.099548895108072383, -0.058173993112225285, -0.065454461562790375, 0.14721672511414477, -0.25363486848379435, 0.20384312381869868, 0.16890435312923632, 0.097537552447695477, 0.087824966562421697, 0.091438713434495431, 0.093809676797766431, -0.034379941362299417, -0.085149037210564868, -0.24900743130006289, 0.021165960517368819, 0.076710369830068792, -0.0061752907196549996, 0.028413473285342519, -0.029983982541843465]
源码:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
# return_128d_features() 获取某张图像的128d特征
# write_into_csv() 将某个文件夹中的图像读取特征兵写入csv
# compute_the_mean() 从csv中读取128d特征,并计算特征均值
import cv2
import os
import dlib
from skimage import io
import csv
import numpy as np
import pandas as pd
path_pics = "F:/code/python/P_dlib_face_reco/data/get_from_camera/"
path_csv = "F:/code/python/P_dlib_face_reco/data/csvs/"
# detector to find the faces
detector = dlib.get_frontal_face_detector()
# shape predictor to find the face landmarks
predictor = dlib.shape_predictor("shape_predictor_5_face_landmarks.dat")
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# 返回单张图像的128D特征
def return_128d_features(path_img):
img = io.imread(path_img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dets = detector(img_gray, 1)
if(len(dets)!=0):
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
else:
face_descriptor = 0
print("no face")
# print(face_descriptor)
return face_descriptor
#return_128d_features(path_pics+"img_face_13.jpg")
# 将文件夹中照片特征提取出来,写入csv
# 输入input:
# path_pics: 图像文件夹的路径
# path_csv: 要生成的csv路径
def write_into_csv(path_pics ,path_csv):
dir_pics = os.listdir(path_pics)
with open(path_csv, "w", newline="") as csvfile:
writer = csv.writer(csvfile)
for i in range(len(dir_pics)):
# 调用return_128d_features()得到128d特征
print(path_pics+dir_pics[i])
features_128d = return_128d_features(path_pics+dir_pics[i])
# print(features_128d)
# 遇到没有检测出人脸的图片跳过
if features_128d==0:
i += 1
else:
writer.writerow(features_128d)
#write_into_csv(path_pics, path_csv+"default_person.csv")
path_csv_rd = "F:/code/python/P_dlib_face_reco/data/csvs/default_person.csv"
# 从csv中读取数据,计算128d特征的均值
def compute_the_mean(path_csv_rd):
column_names = []
for i in range(128):
column_names.append("features_" + str(i + 1))
rd = pd.read_csv(path_csv_rd, names=column_names)
# 存放128维特征的均值
feature_mean = []
for i in range(128):
tmp_arr = rd["features_"+str(i+1)]
tmp_arr = np.array(tmp_arr)
# 计算某一个特征的均值
tmp_mean = np.mean(tmp_arr)
feature_mean.append(tmp_mean)
print(feature_mean)
return feature_mean
compute_the_mean(path_csv_rd)
2.3 face_reco_from_camera.py / 实时人脸识别对比分析
这个py就是调用摄像头,捕获摄像头中的人脸,然后如果检测到人脸,将摄像头中的人脸提取出128D的特征,然后和预设的default_person的128D特征进行计算欧式距离,如果比较小,可以判定为一个人,否则不是一个人;
欧氏距离对比的阈值设定,是在 return_euclidean_distance函数的dist变量;
我这里程序里面指定的是0.4,具体阈值可以根据实际情况或者测得结果进行修改;
源码:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
import dlib # 人脸识别的库dlib
import numpy as np # 数据处理的库numpy
import cv2 # 图像处理的库OpenCv
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# 计算两个向量间的欧式距离
def return_euclidean_distance(feature_1,feature_2):
feature_1 = np.array(feature_1)
feature_2 = np.array(feature_2)
dist = np.sqrt(np.sum(np.square(feature_1 - feature_2)))
print(dist)
if dist > 0.4:
return "diff"
else:
return "same"
features_mean_default_person = [-0.030892765492592986, 0.13333227054068916, 0.054221574805284799, -0.050820438289328626, -0.056331159841073189, 0.0039378538311116004, -0.044465327145237675, -0.13096490031794497, 0.14215188983239627, -0.084465635842398593, 0.34389359700052363, -0.062936659118062566, -0.24372901571424385, -0.13270603316394905, -0.0472818422866495, 0.15475224742763921, -0.24415240554433121, -0.11213862150907516, 0.032288033417180964, 0.023676671577911628, 0.098508275653186594, -0.010117797634417289, 0.0048202000815715448, -0.014808513420192819, -0.060100053486071135, -0.34934839135722112, -0.095795629448012301, -0.050788544706608117, 0.032316677762489567, -0.099673464894294739, -0.080181991975558434, 0.096361607705291952, -0.1823408101734362, -0.045472671817007815, -0.0066827326326778062, 0.047393877549391041, -0.038414973079373964, -0.039067085930391363, 0.15961966781239761, 0.0092458106136243598, -0.16182226570029007, 0.026322136191945327, -0.0039144184832510193, 0.2492692768573761, 0.19180528427425184, 0.022950534855848866, -0.019220497949342979, -0.15331173021542399, 0.047744840089427795, -0.17038608616904208, 0.026140184680882254, 0.19366614363695445, 0.066497623724372762, 0.07038829416820877, -0.0549700813073861, -0.11961311768544347, -0.032121153940495695, 0.083507449611237169, -0.14934051350543373, 0.011458799806668571, 0.10686114273573223, -0.10744074888919529, -0.04377919611962218, -0.11030520381111848, 0.20804878441910996, 0.093076545941202266, -0.11621182490336268, -0.1991656830436305, 0.10751579348978244, -0.11251544991606161, -0.12237925866716787, 0.058218707869711672, -0.15829276019021085, -0.17670038891466042, -0.2718416170070046, 0.034569320955166689, 0.30443575821424784, 0.061833358712886512, -0.19622498672259481, 0.011373612000361868, -0.050225612756453063, -0.036157087079788507, 0.12961127491373764, 0.13962576616751521, -0.0074232793168017737, 0.020964263007044792, -0.11185114399382942, 0.012502493042694894, 0.17834208513561048, -0.072658227462517586, -0.041312719401168194, 0.25095899873658228, -0.056628625839948654, 0.10285118379090961, 0.046701753217923012, 0.042323612264896691, 0.0036216247826814651, 0.066720707440062574, -0.16388990533979317, -0.0193739396421925, 0.027835704435251261, -0.086023958105789985, -0.05472404568603164, 0.14802298341926776, -0.10644183582381199, 0.098863413851512108, 0.00061285014778963834, 0.062096107555063146, 0.051960245755157973, -0.099548895108072383, -0.058173993112225285, -0.065454461562790375, 0.14721672511414477, -0.25363486848379435, 0.20384312381869868, 0.16890435312923632, 0.097537552447695477, 0.087824966562421697, 0.091438713434495431, 0.093809676797766431, -0.034379941362299417, -0.085149037210564868, -0.24900743130006289, 0.021165960517368819, 0.076710369830068792, -0.0061752907196549996, 0.028413473285342519, -0.029983982541843465]
# dlib预测器
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
# 创建cv2摄像头对象
cap = cv2.VideoCapture(0)
# cap.set(propId, value)
# 设置视频参数,propId设置的视频参数,value设置的参数值
cap.set(3, 480)
def get_128d_features(img_gray):
dets = detector(img_gray, 1)
if (len(dets) != 0):
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
else:
face_descriptor=0
return face_descriptor
# cap.isOpened() 返回true/false 检查初始化是否成功
while (cap.isOpened()):
# cap.read()
# 返回两个值:
# 一个布尔值true/false,用来判断读取视频是否成功/是否到视频末尾
# 图像对象,图像的三维矩阵
flag, im_rd = cap.read()
# 每帧数据延时1ms,延时为0读取的是静态帧
kk = cv2.waitKey(1)
# 取灰度
img_gray = cv2.cvtColor(im_rd, cv2.COLOR_RGB2GRAY)
# 人脸数rects
rects = detector(img_gray, 0)
# print(len(rects))
# 待会要写的字体
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(im_rd, "q: quit", (20, 400), font, 0.8, (0, 255, 255), 1, cv2.LINE_AA)
if (len(rects) != 0):
# 检测到人脸
# 将捕获到的人脸提取特征和内置特征进行比对
features_rd = get_128d_features(im_rd)
compare = return_euclidean_distance(features_rd, features_mean_default_person)
im_rd = cv2.putText(im_rd, compare.replace("same", "default_person"), (20, 350), font, 0.8, (0, 255, 255), 1, cv2.LINE_AA)
# 矩形框
for k, d in enumerate(rects):
# 绘制矩形框
im_rd = cv2.rectangle(im_rd, tuple([d.left(), d.top()]), tuple([d.right(), d.bottom()]), (0, 255, 255), 2)
cv2.putText(im_rd, "faces: " + str(len(rects)), (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
else:
# 没有检测到人脸
cv2.putText(im_rd, "no face", (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
# 按下q键退出
if (kk == ord('q')):
break
# 窗口显示
cv2.imshow("camera", im_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
实时输出结果:
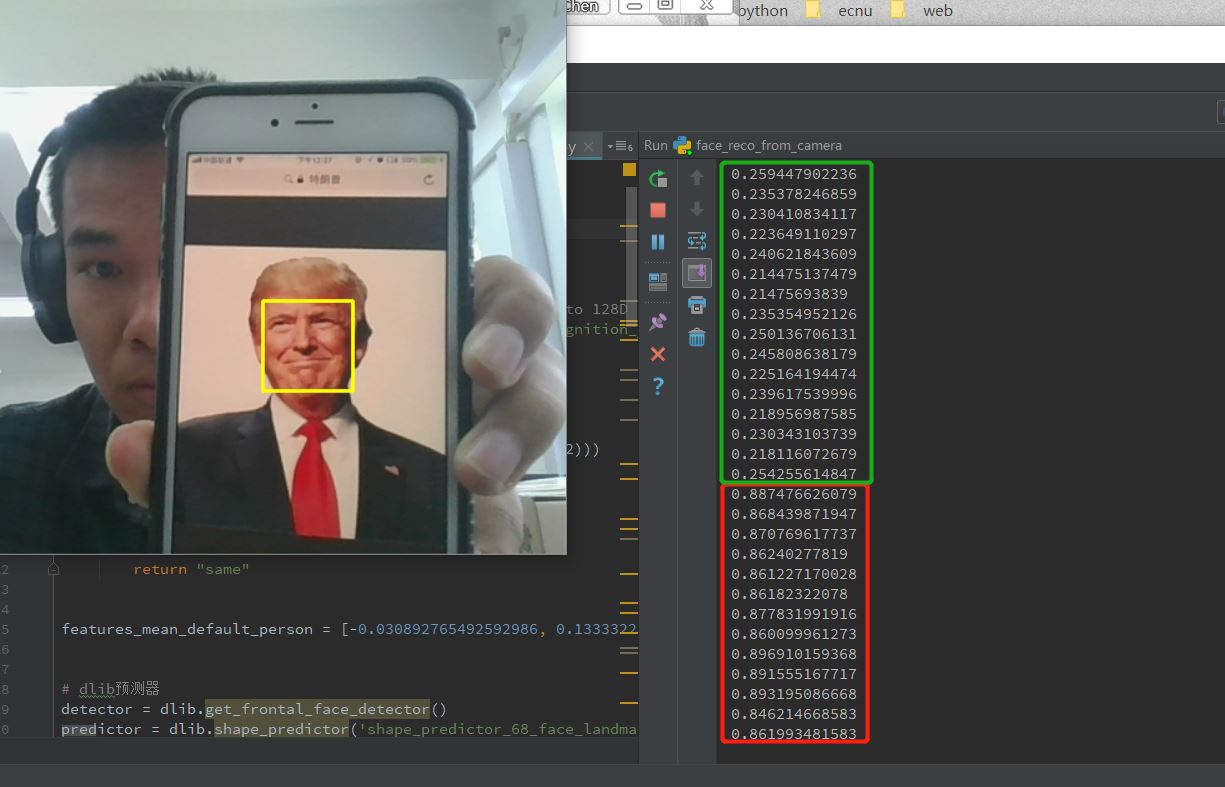
图6 实时输出的欧氏距离结果
通过实时的输出结果,看的比较明显;
输出绿色部分:当是我自己(即之前分析提取特征的default_person)时,计算出来的欧式距离基本都在0.2 左右;
输出红色部分:而换一张图片上去比如特朗普,明显看到欧式距离计算结果达到了0.8,此时就可以判定,后来这张人脸不是我们预设的人脸;
所以之前提到的欧式距离计算对比的阈值可以由此设定,本项目中取的是0.4;
3.总结
之前接着那个摄像头人脸检测写的,不过拖到现在才更新,写的也比较粗糙,大家有具体需求和应用场景可以加以修改,有什么问题可以留言或者直接mail 我。。。不好意思
核心就是提取人脸特征,然后计算欧式距离和预设的特征脸进行比对;
不过这个实时获取摄像头人脸进行比对,要实时的进行计算摄像头脸的特征值,然后还要计算欧氏距离,所以计算量比较大,可能摄像头视频流会出现卡顿;
# 代码已上传到了我的GitHub,如果对您有帮助欢迎star下:https://github.com/coneypo/Dlib_face_recognition_from_camera
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
您可能感兴趣的文章:
- python3+dlib实现人脸识别和情绪分析
- python 3利用Dlib 19.7实现摄像头人脸检测特征点标定
- python3利用Dlib19.7实现人脸68个特征点标定
- 学习Python3 Dlib19.7进行人脸面部识别
- Python3结合Dlib实现人脸识别和剪切
相关推荐
-
python3+dlib实现人脸识别和情绪分析
一.介绍 我想做的是基于人脸识别的表情(情绪)分析.看到网上也是有很多的开源库提供使用,为开发提供了很大的方便.我选择目前用的比较多的dlib库进行人脸识别与特征标定.使用python也缩短了开发周期. 官网对于dlib的介绍是:Dlib包含广泛的机器学习算法.所有的设计都是高度模块化的,快速执行,并且通过一个干净而现代的C ++ API,使用起来非常简单.它用于各种应用,包括机器人技术,嵌入式设备,手机和大型高性能计算环境. 虽然应用都比较高大上,但是自己在PC上做个情绪分析的小软件还是挺有意
-

学习Python3 Dlib19.7进行人脸面部识别
0.引言 自己在下载dlib官网给的example代码时,一开始不知道怎么使用,在一番摸索之后弄明白怎么使用了: 现分享下 face_detector.py 和 face_landmark_detection.py 这两个py的使用方法: 1.简介 python: 3.6.3 dlib: 19.7 利用dlib的特征提取器,进行人脸 矩形框 的特征提取: dets = dlib.get_frontal_face_detector(img) 利用dlib的68点特征预测器,进行人脸 68点 特征提
-
Python3结合Dlib实现人脸识别和剪切
0.引言 利用python开发,借助Dlib库进行人脸识别,然后将检测到的人脸剪切下来,依次排序显示在新的图像上: 实现的效果如下图所示,将图1原图中的6张人脸检测出来,然后剪切下来,在图像窗口中依次输出显示人脸: 实现比较简单,代码量也比较少,适合入门或者兴趣学习. 图1 原图和处理后得到的图像窗口 1.开发环境 python: 3.6.3 dlib: 19.7 OpenCv, numpy import dlib # 人脸识别的库dlib import numpy as np # 数据处理的库
-
python3利用Dlib19.7实现人脸68个特征点标定
0.引言 利用Dlib官方训练好的模型"shape_predictor_68_face_landmarks.dat"进行68点标定,利用OpenCv进行图像化处理,在人脸上画出68个点,并标明序号: 实现的68个特征点标定功能如下图所示: 图1 人脸68个特征点的标定 1.开发环境 python:3.6.3 dlib:19.7 OpenCv, numpy 需要调用的库: import dlib #人脸识别的库dlib import numpy as np #数据处理的库numpy im
-
python 3利用Dlib 19.7实现摄像头人脸检测特征点标定
Python 3 利用 Dlib 19.7 实现摄像头人脸检测特征点标定 0.引言 利用python开发,借助Dlib库捕获摄像头中的人脸,进行实时特征点标定: 图1 工程效果示例(gif) 图2 工程效果示例(静态图片) (实现比较简单,代码量也比较少,适合入门或者兴趣学习.) 1.开发环境 python: 3.6.3 dlib: 19.7 OpenCv, numpy import dlib # 人脸识别的库dlib import numpy as np # 数据处理的库numpy impor
-
Python3利用Dlib19.7实现摄像头人脸识别的方法
0.引言 利用python开发,借助Dlib库捕获摄像头中的人脸,提取人脸特征,通过计算欧氏距离来和预存的人脸特征进行对比,达到人脸识别的目的: 可以自动从摄像头中抠取人脸图片存储到本地,然后提取构建预设人脸特征: 根据抠取的 / 已有的同一个人多张人脸图片提取128D特征值,然后计算该人的128D特征均值: 然后和摄像头中实时获取到的人脸提取出的特征值,计算欧氏距离,判定是否为同一张人脸: 人脸识别 / face recognition的说明: wikipedia 关于人脸识别系统 / fac
-
Python3 利用face_recognition实现人脸识别的方法
前言 之前实践了下face++在线人脸识别版本,这回做一下离线版本.github 上面有关于face_recognition的相关资料,本人只是做个搬运工,对其中的一些内容进行搬运,对其中一些例子进行实现. 官方描述: face_recognition是一个强大.简单.易上手的人脸识别开源项目,并且配备了完整的开发文档和应用案例,特别是兼容树莓派系统.本项目是世界上最简洁的人脸识别库,你可以使用Python和命令行工具提取.识别.操作人脸.本项目的人脸识别是基于业内领先的C++开源库 dlib中
-
python版opencv摄像头人脸实时检测方法
OpenCV版本3.3.0,注意模型文件的路径要改成自己所安装的opencv的模型文件的路径,路径不对就会报错,一般在opencv-3.3.0/data/haarcascades 路径下 import numpy as np import cv2 face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml') cap = cv2.VideoCapture(0) while True: ret,img = ca
-
python3利用ctypes传入一个字符串类型的列表方法
c语言里:c_p.c #include <stdio.h> void get_str_list(int n, char *b[2]) { printf("in c start"); for(int i=0;i<n;i++) { printf("%s", *(b+i)); printf("\n"); } printf("in c end"); } 编译为动态库的命令: gcc -o hello1.so -sha
-
Dlib+OpenCV深度学习人脸识别的方法示例
前言 人脸识别在LWF(Labeled Faces in the Wild)数据集上人脸识别率现在已经99.7%以上,这个识别率确实非常高了,但是真实的环境中的准确率有多少呢?我没有这方面的数据,但是可以确信的是真实环境中的识别率并没有那么乐观.现在虽然有一些商业应用如员工人脸识别管理系统.海关身份验证系统.甚至是银行人脸识别功能,但是我们可以仔细想想员工人脸识别管理,海关身份证系统的应用场景对身份的验证功能其实并没有商家吹嘘的那么重要,打个比方说员工上班的时候刷脸如果失败了会怎样,是不是重新识
-
手把手教你利用opencv实现人脸识别功能(附源码+文档)
目录 一.环境 二.使用Haar级联进行人脸检测 三.Haar级联结合摄像头 四.使用SSD的人脸检测 五. SSD结合摄像头人脸检测 六.结语 一.环境 pip install opencv-python python3.9 pycharm2020 人狠话不多,直接上代码,注释在代码里面,不说废话. 二.使用Haar级联进行人脸检测 测试案例: 代码:(记得自己到下载地址下载对应的xml) # coding=gbk """ 作者:川川 @时间 : 2021/9/5 16:3
-
基于python3 OpenCV3实现静态图片人脸识别
本文采用OpenCV3和Python3 来实现静态图片的人脸识别,采用的是Haar文件级联. 首先需要将OpenCV3源代码中找到data文件夹下面的haarcascades文件夹里面包含了所有的OpenCV的人脸检测的XML文件,这些文件可以用于检测静态,视频文件,摄像头视频流中的人脸,找到haarcascades文件夹后,复制里面的XML文件,在你新建的Python脚本文件目录里面建一个名为cascades的文件夹,并把复制的XML文件粘贴到新建的文件夹中一些有人脸的的图片,这个大家可以自行
-
基于opencv和pillow实现人脸识别系统(附demo)
目录 一.人脸检测和数据收集 二.训练识别器 三.人脸识别和显示 本文不涉及分类器.训练识别器等算法原理,仅包含对其应用(未来我也会写自己对机器学习算法原理的一些观点和了解) 首先我们需要知道的是利用现有框架做一个人脸识别系统并不难,然后就开始我们的系统开发吧. 我们的系统主要分为三个部分,然后我还会提出对补获图片不能添加中文的解决方案.我们需要完成的任务:1.人脸检测和数据收集2.训练识别器3.人脸识别和显示 在读此篇文章之前我相信你已经做了python环境部署和opencv模块的下载安装工作