python cv2截取不规则区域图片实例
知识掌握
cv2.threshold()函数:
设置固定级别的阈值应用于多通道矩阵,将灰度图像变换二值图像,或去除指定级别的噪声,或过滤掉过小或者过大的像素点。
Python: cv2.threshold(src, thresh, maxval, type[, dst]) → retval, dst
在其中:
src:表示的是图片源
thresh:表示的是阈值(起始值)
maxval:表示的是最大值
type:表示的是这里划分的时候使用的是什么类型的算法,常用值为0(cv2.THRESH_BINARY)
import cv2
img = cv2.imread('1.jpg')
cv2.imshow("src", img)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, dst = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
cv2.imshow("dst", dst)
cv2.waitKey(0)

cv2.findContours()函数:
查找检测物体的轮廓
cv2.findContours(image, mode, method)
opencv2返回两个值:contours:hierarchy。
注:opencv3会返回三个值,分别是img, countours, hierarchy
在其中:
image:表示的是寻找轮廓的图像;
mode:表示的是轮廓的检索模式,有四种:
cv2.RETR_EXTERNAL表示只检测外轮廓
cv2.RETR_LIST检测的轮廓不建立等级关系
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE建立一个等级树结构的轮廓。
method:表示的是轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
import numpy as np
import cv2
rectangle = np.zeros((300,300),dtype="uint8")
cv2.rectangle(rectangle,(25,25),(275,275),255,-1)
cv2.imshow("Rectangle",rectangle)
img, countours, hierarchy = cv2.findContours(rectangle, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print(countours)
print(hierarchy)
cv2.waitKey(0)

[array([[[ 25, 25]], [[ 25, 275]], [[275, 275]], [[275, 25]]], dtype=int32)] [[[-1 -1 -1 -1]]]
cv2.polylines函数:
绘制多边形
cv2.polylines(img, pts, isClosed, color[, thickness[, lineType[,shift]]])
首先需要顶点坐标.将这些点转换为rowsx1x2形状的数组,其中rows是顶点数,它应该是int32类型。
import numpy as np
import cv2
# Create a black image
img = np.zeros((200, 200, 3), np.uint8)
pts = np.array([[10, 5], [20, 30], [70, 20], [50, 10]], np.int32) # 每个点都是(x, y)
pts = pts.reshape((-1, 1, 2))
cv2.polylines(img, [pts], True, (0, 255, 255))
pts = np.array([[100, 5], [150, 30], [80, 20], [90, 10]], np.int32)
cv2.polylines(img, [pts], False, (0, 255, 255))
cv2.imshow('img2', img)
cv2.waitKey()
如果第三个参数为False,您将获得连接所有点的折线,而不是闭合形状。
cv2.polylines()可用于绘制多条线.只需创建要绘制的所有行的列表并将其传递给函数, 所有线条都将单独绘制.绘制一组行比为每行调用cv2.line()要好得多,速度更快.

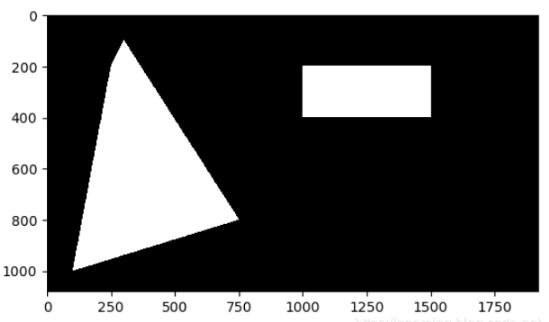
cv2.fillPoly)函数
可以用来填充任意形状的图型.可以用来绘制多边形,工作中也经常使用非常多个边来近似的画一条曲线.cv2.fillPoly()函数可以一次填充多个图型.
cv2.fillPoly(image,ppt,Scalar(255,255,255))
image:表示的是多边形将被画到image上
ppt:表示的是多边形的顶点集为ppt
Scalar:表示的是多边形的颜色定义为Scarlar(255,255,255),即RGB的值为白色
img = np.zeros((1080, 1920, 3), np.uint8) area1 = np.array([[250, 200], [300, 100], [750, 800], [100, 1000]]) area2 = np.array([[1000, 200], [1500, 200], [1500, 400], [1000, 400]]) cv2.fillPoly(img, [area1, area2], (255, 255, 255)) plt.imshow(img) plt.show()
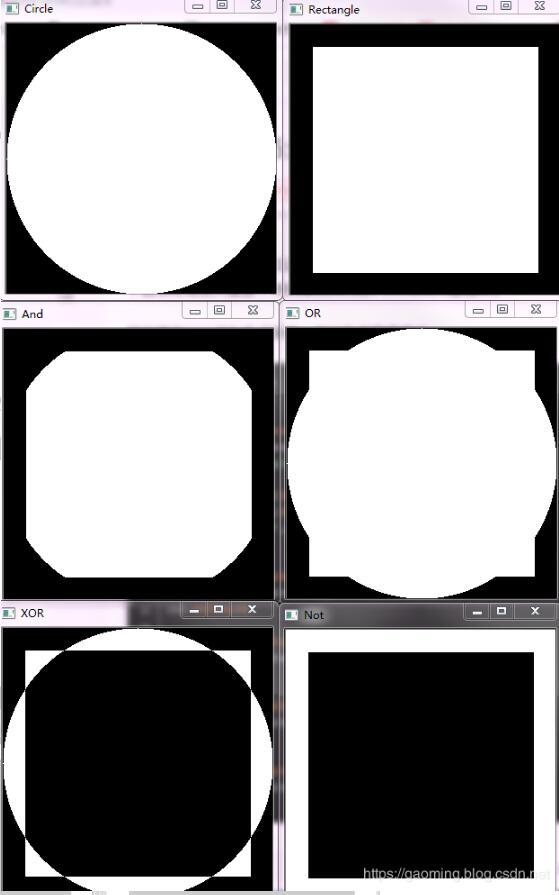
按位操作-bitwise operations
import numpy as np
import cv2
rectangle = np.zeros((300,300),dtype="uint8")
cv2.rectangle(rectangle,(25,25),(275,275),255,-1)
cv2.imshow("Rectangle",rectangle)
circle = np.zeros((300,300),dtype="uint8")
cv2.circle(circle,(150,150),150,255,-1)
cv2.imshow("Circle",circle)
bitwiseAnd = cv2.bitwise_and(rectangle,circle)
cv2.imshow("And",bitwiseAnd)
bitwiseOr = cv2.bitwise_or(rectangle,circle)
cv2.imshow("OR",bitwiseOr)
bitwiseXor = cv2.bitwise_xor(rectangle,circle)
cv2.imshow("XOR",bitwiseXor)
bitwiseNot = cv2.bitwise_not(rectangle)
cv2.imshow("Not",bitwiseNot)
cv2.waitKey(0)
如果一个给定的像素的值大于零,那么这个像素会被打开,如果它的值为零,它就会被关闭。按位功能在这些二进制条件下运行。
AND:当且仅当两个像素都大于零时,按位AND才为真。
OR:如果两个像素中的任何一个大于零,则按位“或”为真。
XOR 异或功能:当且仅当两个像素中的任何一个大于零时,按位XOR才为真,但不是两者都是。当且仅当两个像素一个大于0一个小于0时才为真,其他都为false
NOT 取反:倒置图像中的“开”和“关”像素。
# -*- coding: utf-8 -*-
import cv2
import numpy as np
global img
global point1, point2
lsPointsChoose = []
tpPointsChoose = []
pointsCount = 0
count = 0
pointsMax = 5
lsPointsChoose = []
tpPointsChoose = []
pointsCount = 0
count = 0
pointsMax = 5
def on_mouse(event, x, y, flags, param):
global img, point1, point2, count, pointsMax
global lsPointsChoose, tpPointsChoose # 存入选择的点
global pointsCount # 对鼠标按下的点计数
global init_img, ROI_bymouse_flag
init_img = img.copy() # 此行代码保证每次都重新再原图画 避免画多了
if event == cv2.EVENT_LBUTTONDOWN: # 左键点击
pointsCount = pointsCount + 1
# 为了保存绘制的区域,画的点稍晚清零
if(pointsCount == pointsMax + 1):
pointsCount = 0
tpPointsChoose = []
print('pointsCount:', pointsCount)
point1 = (x, y)
print (x, y)
# 画出点击的点
cv2.circle(init_img, point1, 10, (0, 255, 0), 5)
# 将选取的点保存到list列表里
lsPointsChoose.append([x, y]) # 用于转化为darry 提取多边形ROI
tpPointsChoose.append((x, y)) # 用于画点
# 将鼠标选的点用直线链接起来
print(len(tpPointsChoose))
for i in range(len(tpPointsChoose) - 1):
cv2.line(init_img, tpPointsChoose[i], tpPointsChoose[i + 1], (0, 0, 255), 5)
# 点击到pointMax时可以提取去绘图
if(pointsCount == pointsMax):
# 绘制感兴趣区域
ROI_byMouse()
ROI_bymouse_flag = 1
lsPointsChoose = []
cv2.imshow('src', init_img)
# 右键按下清除轨迹
if event == cv2.EVENT_RBUTTONDOWN: # 右键点击
print("right-mouse")
pointsCount = 0
tpPointsChoose = []
lsPointsChoose = []
print(len(tpPointsChoose))
for i in range(len(tpPointsChoose) - 1):
print('i', i)
cv2.line(init_img, tpPointsChoose[i], tpPointsChoose[i + 1], (0, 0, 255), 5)
cv2.imshow('src', init_img)
def ROI_byMouse():
global src, ROI, ROI_flag, mask2
mask = np.zeros(img.shape, np.uint8)
pts = np.array([lsPointsChoose], np.int32)
pts = pts.reshape((-1, 1, 2)) # -1代表剩下的维度自动计算
# 画多边形
mask = cv2.polylines(mask, [pts], True, (0, 255, 255))
# 填充多边形
mask2 = cv2.fillPoly(mask, [pts], (255, 255, 255))
cv2.imshow('mask', mask2)
ROI = cv2.bitwise_and(mask2, img)
cv2.imshow('ROI', ROI)
def main():
global img, init_img, ROI
img = cv2.imread('1.jpg')
# 图像预处理,设置其大小
height, width = img.shape[:2]
size = (int(width * 0.3), int(height * 0.3))
img = cv2.resize(img, size, interpolation=cv2.INTER_AREA)
ROI = img.copy()
cv2.namedWindow('src')
cv2.setMouseCallback('src', on_mouse)
cv2.imshow('src', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
以上这篇python cv2截取不规则区域图片实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
Python+OpenCV感兴趣区域ROI提取方法
方法一:使用轮廓 步骤1 """src为原图""" ROI = np.zeros(src.shape, np.uint8) #感兴趣区域ROI proimage = src.copy() #复制原图 """提取轮廓""" proimage=cv2.cvtColor(proimage,cv2.COLOR_BGR2GRAY) #转换成灰度图 proimage=cv2.adaptiveThre
-
python用opencv批量截取图像指定区域的方法
代码如下 import os import cv2 for i in range(1,201): if i==169 or i==189: i = i+1 pth = "C:\\Users\\Desktop\\asd\\"+str(i)+".bmp" image = cv2.imread(pth) //从指定路径读取图像 cropImg = image[600:1200,750:1500] //获取感兴趣区域 cv2.imwrite("C:\\Users\
-
Python+OpenCV图片局部区域像素值处理详解
背景故事:我需要对一张图片做一些处理,是在图像像素级别上的数值处理,以此来反映图片中特定区域的图像特征,网上查了很多,大多关于opencv的应用教程帖子基本是停留在打开图片,提取像素重新写入图片啊之类的基本操作,我是要取图片中的特定区域再提取它的像素值,作为一个初学者开始接触opencv简直一脸懵,慢慢摸索着知道了opencv的一些函数是可以实现的像SetImageROI()函数设置ROI区域,即感兴趣区域,就很好用啊,总之最后是实现了自己想要的功能.现在看个程序确实是有点挫,也有好多多余的没必
-
python cv2截取不规则区域图片实例
知识掌握 cv2.threshold()函数: 设置固定级别的阈值应用于多通道矩阵,将灰度图像变换二值图像,或去除指定级别的噪声,或过滤掉过小或者过大的像素点. Python: cv2.threshold(src, thresh, maxval, type[, dst]) → retval, dst 在其中: src:表示的是图片源 thresh:表示的是阈值(起始值) maxval:表示的是最大值 type:表示的是这里划分的时候使用的是什么类型的算法,常用值为0(cv2.THRESH_BIN
-

python+matplotlib实现动态绘制图片实例代码(交互式绘图)
本文研究的主要是python+matplotlib实现动态绘制图片(交互式绘图)的相关内容,具体介绍和实现代码如下所示. 最近在研究动态障碍物避障算法,在Python语言进行算法仿真时需要实时显示障碍物和运动物的当前位置和轨迹,利用Anaconda的Python打包集合,在Spyder中使用Python3.5语言和matplotlib实现路径的动态显示和交互式绘图(和Matlab功能类似). Anaconda是一个用于科学计算的Python发行版,支持 Linux, Mac, Windows系统
-
python自动截取需要区域,进行图像识别的方法
实例如下所示: import os os.chdir("G:\Python1\Lib\site-packages\pytesser") from pytesser import * from pytesseract import image_to_string from PIL import Image from PIL import ImageGrab #截图,获取需要识别的区域 x = 345 y = 281 m = 462 n = 327 k = 54 for i in rang
-
使用python存储网页上的图片实例
本文介绍在已知网络图片的地址下,存储图片到本地 本文例子随便选择LOFTER上一张图片,复制图片的地址,如下图所示 在Python中输入代码 import requests #图片地址 img_url = "http://imglf0.nosdn.127.net/img/RWppUi92Wk1nQzFtTUtCdUdwY2Vkd1pPekVqZ1RhT0VRZVJkeFhRanc0d2Vwa2dVUmUrR25RPT0.jpg?imageView&thumbnail=500x0&
-
python生成带有表格的图片实例
因为工作中需要,需要生成一个带表格的图片 例如: 直接在html中写一个table标签,然后单独把表格部分保存成图片 或者是直接将excel中的内容保存成一个图片 刚开始的思路,是直接生成一个带有table标签的html文件,然后将这个文件转成图片,经过查找资料发现需要安装webkit2png,而这个库又依赖其他的东西,遂放弃. 当初的目标是直接生成一个图片,并且是只需要安装python依赖库就行,而不需要在系统层面安装相应的依赖包 后来考虑使用Python的图片处理库Pillow,和生成表格式
-
用python实现爬取奥特曼图片实例
爬取网址:http://www.ultramanclub.com/allultraman/ 使用工具:pycharm,requests 进入网页 打开开发者工具 点击 Network 刷新网页,获取信息 其中的Request URL就是我们所爬取的网址 滑到最下有一个User-Agent,复制 向服务器发送请求 200意味着请求成功 使用 response.text 获取文本数据 可以看到有些乱码 使用encode转换 import requests url = 'http://www.ultr
-
Python利用requests模块下载图片实例代码
本文主要介绍的是关于Python利用requests模块下载图片的相关,下面话不多说了,来一起看看详细的介绍吧 MySQL中事先保存好爬取到的图片链接地址. 然后使用多线程把图片下载到本地. 示例代码: # coding: utf-8 import MySQLdb import requests import os import re from threading import Thread import datetime header = {'User-Agent': 'Mozilla/5.0
-
Python批量生成幻影坦克图片实例代码
前言 说到幻影坦克,我就想起红色警戒里的-- 幻影坦克(Mirage Tank),<红色警戒2>以及<尤里的复仇>中盟军的一款伪装坦克,盟军王牌坦克之一.是爱因斯坦在德国黑森林中研发的一种坦克.虽然它无法隐形,但它却可以利用先进的光线偏折原理可以伪装成树木(岩石或草丛)来隐藏自己. 在一些MOD中,幻影坦克可以选择变换的树木,这样便可以和背景的树木融合,而不会令人生疑. 额!这是从什么百科ctrl+v过来的吗.我跟你说个P~ UBG 不过话说回来,里面有一句说到和背景融合,这大概就
-
对python cv2批量灰度图片并保存的实例讲解
如下所示: import cv2 #循环灰度图片并保存 def grayImg(): for x in range(1,38): #读取图片 img = cv2.imread("C:\\Users\\lyl\\Desktop\\new_dahuoji\\img2\\{}.jpg".format(str(x))) GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) #保存灰度后的新图片 cv2.imwrite("C:\\Users\\l
-
Python 读取xml数据,cv2裁剪图片实例
下载的数据是pascal voc2012的数据,已经有annotation了,不过是xml格式的,训练的模型是在Google模型的基础上加了两层网络,因此要在原始图像中裁剪出用于训练的部分图像. 另外,在原来给的标注框的基础上,做了点框的移动.最后同类目标存储在同一文件夹中. from __future__ import division import os from PIL import Image import xml.dom.minidom import numpy as np ImgPa