C#多线程系列之线程等待
目录
- 前言
- volatile 关键字
- 三种常用等待
- 再说自旋和阻塞
- SpinWait 结构
- 属性和方法
- 自旋示例
- 新的实现
- SpinLock 结构
- 属性和方法
- 示例
- 等待性能对比
前言
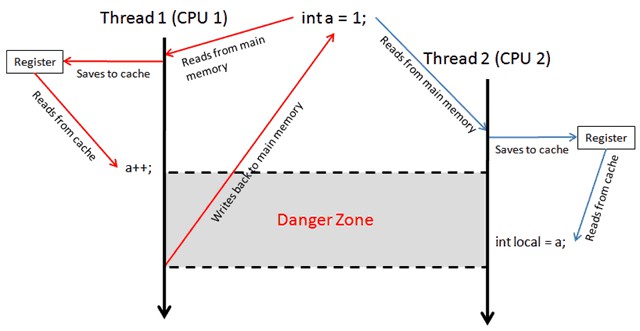
volatile 关键字
volatile 关键字指示一个字段可以由多个同时执行的线程修改。
我们继续使用《C#多线程(3):原子操作》中的示例:
static void Main(string[] args)
{
for (int i = 0; i < 5; i++)
{
new Thread(AddOne).Start();
}
Thread.Sleep(TimeSpan.FromSeconds(5));
Console.WriteLine("sum = " + sum);
Console.ReadKey();
}
private static int sum = 0;
public static void AddOne()
{
for (int i = 0; i < 100_0000; i++)
{
sum += 1;
}
}
运行后你会发现,结果不为 500_0000,而使用 Interlocked.Increment(ref sum);后,可以获得准确可靠的结果。
你试试再运行下面的示例:
static void Main(string[] args)
{
for (int i = 0; i < 5; i++)
{
new Thread(AddOne).Start();
}
Thread.Sleep(TimeSpan.FromSeconds(5));
Console.WriteLine("sum = " + sum);
Console.ReadKey();
}
private static volatile int sum = 0;
public static void AddOne()
{
for (int i = 0; i < 100_0000; i++)
{
sum += 1;
}
}
你以为正常了?哈哈哈,并没有。
volatile 的作用在于读,保证了观察的顺序和写入的顺序一致,每次读取的都是最新的一个值;不会干扰写操作。
详情请点击:https://docs.microsoft.com/zh-cn/dotnet/csharp/language-reference/keywords/volatile
其原理解释:https://theburningmonk.com/2010/03/threading-understanding-the-volatile-modifier-in-csharp/
三种常用等待
这三种等待分别是:
Thread.Sleep();
Thread.SpinWait();
Task.Delay();
Thread.Sleep(); 会阻塞线程,使得线程交出时间片,然后处于休眠状态,直至被重新唤醒;适合用于长时间的等待;
Thread.SpinWait(); 使用了自旋等待,等待过程中会进行一些的运算,线程不会休眠,用于微小的时间等待;长时间等待会影响性能;
Task.Delay(); 用于异步中的等待,异步的文章后面才写,这里先不理会;
这里我们还需要继续 SpinWait 和 SpinLock 这两个类型,最后再进行总结对照。
再说自旋和阻塞
前面我们学习过自旋和阻塞的区别,这里再来撸清楚一下。
线程等待有内核模式(Kernel Mode)和用户模式(User Model)。
因为只有操作系统才能控制线程的生命周期,因此使用 Thread.Sleep() 等方式阻塞线程,发生上下文切换,此种等待称为内核模式。
用户模式使线程等待,并不需要线程切换上下文,而是让线程通过执行一些无意义的运算,实现等待。也称为自旋。
SpinWait 结构
微软文档定义:为基于自旋的等待提供支持。
SpinWait 是结构体;Thread.SpinWait() 的原理就是 SpinWait 。
如果你想了解 Thread.SpinWait() 是怎么实现的,可以参考 https://www.tabsoverspaces.com/233735-how-is-thread-spinwait-actually-implemented
线程阻塞是会耗费上下文切换的,对于过短的线程等待,这种切换的代价会比较昂贵的。在我们前面的示例中,大量使用了 Thread.Sleep() 和各种类型的等待方法,这其实是不合理的。
SpinWait 则提供了更好的选择。
属性和方法
老规矩,先来看一下 SpinWait 常用的属性和方法。
属性:
| 属性 | 说明 |
|---|---|
| Count | 获取已对此实例调用 SpinOnce() 的次数。 |
| NextSpinWillYield | 获取对 SpinOnce() 的下一次调用是否将产生处理器,同时触发强制上下文切换。 |
方法:
| 方法 | 说明 |
|---|---|
| Reset() | 重置自旋计数器。 |
| SpinOnce() | 执行单一自旋。 |
| SpinOnce(Int32) | 执行单一自旋,并在达到最小旋转计数后调用 Sleep(Int32) 。 |
| SpinUntil(Func) | 在指定条件得到满足之前自旋。 |
| SpinUntil(Func, Int32) | 在指定条件得到满足或指定超时过期之前自旋。 |
| SpinUntil(Func, TimeSpan) | 在指定条件得到满足或指定超时过期之前自旋。 |
自旋示例
下面来实现一个让当前线程等待其它线程完成任务的功能。
其功能是开辟一个线程对 sum 进行 +1,当新的线程完成运算后,主线程才能继续运行。
class Program
{
static void Main(string[] args)
{
new Thread(DoWork).Start();
// 等待上面的线程完成工作
MySleep();
Console.WriteLine("sum = " + sum);
Console.ReadKey();
}
private static int sum = 0;
private static void DoWork()
{
for (int i = 0; i < 1000_0000; i++)
{
sum++;
}
isCompleted = true;
}
// 自定义等待等待
private static bool isCompleted = false;
private static void MySleep()
{
int i = 0;
while (!isCompleted)
{
i++;
}
}
}
新的实现
我们改进上面的示例,修改 MySleep 方法,改成:
private static bool isCompleted = false;
private static void MySleep()
{
SpinWait wait = new SpinWait();
while (!isCompleted)
{
wait.SpinOnce();
}
}
或者改成
private static bool isCompleted = false;
private static void MySleep()
{
SpinWait.SpinUntil(() => isCompleted);
}
SpinLock 结构
微软文档:提供一个相互排斥锁基元,在该基元中,尝试获取锁的线程将在重复检查的循环中等待,直至该锁变为可用为止。
SpinLock 称为自旋锁,适合用在频繁争用而且等待时间较短的场景。主要特征是避免了阻塞,不出现昂贵的上下文切换。
笔者水平有限,关于 SpinLock ,可以参考 https://www.c-sharpcorner.com/UploadFile/1d42da/spinlock-class-in-threading-C-Sharp/
另外,还记得 Monitor 嘛?SpinLock 跟 Monitor 比较像噢~https://www.jb51.net/article/237307.htm
在《C#多线程(10:读写锁)》中,我们介绍了 ReaderWriterLock 和 ReaderWriterLockSlim ,而 ReaderWriterLockSlim 内部依赖于 SpinLock,并且比 ReaderWriterLock 快了三倍。
属性和方法
SpinLock 常用属性和方法如下:
属性:
| 属性 | 说明 |
|---|---|
| IsHeld | 获取锁当前是否已由任何线程占用。 |
| IsHeldByCurrentThread | 获取锁是否已由当前线程占用。 |
| IsThreadOwnerTrackingEnabled | 获取是否已为此实例启用了线程所有权跟踪。 |
方法:
| 方法 | 说明 |
|---|---|
| Enter(Boolean) | 采用可靠的方式获取锁,这样,即使在方法调用中发生异常的情况下,都能采用可靠的方式检查 lockTaken 以确定是否已获取锁。 |
| Exit() | 释放锁。 |
| Exit(Boolean) | 释放锁。 |
| TryEnter(Boolean) | 尝试采用可靠的方式获取锁,这样,即使在方法调用中发生异常的情况下,都能采用可靠的方式检查 lockTaken 以确定是否已获取锁。 |
| TryEnter(Int32, Boolean) | 尝试采用可靠的方式获取锁,这样,即使在方法调用中发生异常的情况下,都能采用可靠的方式检查 lockTaken 以确定是否已获取锁。 |
| TryEnter(TimeSpan, Boolean) | 尝试采用可靠的方式获取锁,这样,即使在方法调用中发生异常的情况下,都能采用可靠的方式检查 lockTaken 以确定是否已获取锁。 |
示例
SpinLock 的模板如下:
private static void DoWork()
{
SpinLock spinLock = new SpinLock();
bool isGetLock = false; // 是否已获得了锁
try
{
spinLock.Enter(ref isGetLock);
// 运算
}
finally
{
if (isGetLock)
spinLock.Exit();
}
}
这里就不写场景示例了。
需要注意的是, SpinLock 实例不能共享,也不能重复使用。
等待性能对比
大佬的文章,.NET 中的多种锁性能测试数据:http://kejser.org/synchronisation-in-net-part-3-spinlocks-and-interlocks/
这里我们简单测试一下阻塞和自旋的性能测试对比。
我们经常说,Thread.Sleep() 会发生上下文切换,出现比较大的性能损失。具体有多大呢?我们来测试一下。(以下运算都是在 Debug 下测试)
测试 Thread.Sleep(1):
private static void DoWork()
{
Stopwatch watch = new Stopwatch();
watch.Start();
for (int i = 0; i < 1_0000; i++)
{
Thread.Sleep(1);
}
watch.Stop();
Console.WriteLine(watch.ElapsedMilliseconds);
}
笔者机器测试,结果大约 20018。Thread.Sleep(1) 减去等待的时间 10000 毫秒,那么进行 10000 次上下文切换需要花费 10000 毫秒,约每次 1 毫秒。
上面示例改成:
for (int i = 0; i < 1_0000; i++)
{
Thread.Sleep(2);
}
运算,发现结果为 30013,也说明了上下文切换,大约需要一毫秒。
改成 Thread.SpinWait(1000):
for (int i = 0; i < 100_0000; i++)
{
Thread.SpinWait(1000);
}
结果为 28876,说明自旋 1000 次,大约需要 0.03 毫秒。
到此这篇关于C#多线程系列之线程等待的文章就介绍到这了。希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-
C#多线程系列之读写锁
本篇的内容主要是介绍 ReaderWriterLockSlim 类,来实现多线程下的读写分离. ReaderWriterLockSlim ReaderWriterLock 类:定义支持单个写线程和多个读线程的锁. ReaderWriterLockSlim 类:表示用于管理资源访问的锁定状态,可实现多线程读取或进行独占式写入访问. 两者的 API 十分接近,而且 ReaderWriterLockSlim 相对 ReaderWriterLock 来说 更加安全.因此本文主要讲解 ReaderWrit
-

C#多线程系列之工作流实现
目录 前言 节点 Then Parallel Schedule Delay 试用一下 顺序节点 并行任务 编写工作流 接口构建器 工作流构建器 依赖注入 实现工作流解析 前言 前面学习了很多多线程和任务的基础知识,这里要来实践一下啦.通过本篇教程,你可以写出一个简单的工作流引擎. 本篇教程内容完成是基于任务的,只需要看过笔者的三篇关于异步的文章,掌握 C# 基础,即可轻松完成. C#多线程系列之任务基础(一) C#多线程系列之任务基础(二) C#多线程系列之任务基础(三) 由于本篇文章编写的工作
-
C#多线程系列之手动线程通知
区别与示例 AutoResetEvent 和 ManualResetEvent 十分相似.两者之间的区别,在于前者是自动(Auto),后者是手动(Manua). 你可以先运行下面的示例,再测试两者的区别. AutoResetEvent 示例: class Program { // 线程通知 private static AutoResetEvent resetEvent = new AutoResetEvent(false); static void Main(string[] args) {
-
C#多线程系列之任务基础(三)
目录 TaskAwaiter 延续的另一种方法 另一种创建任务的方法 实现一个支持同步和异步任务的类型 Task.FromCanceled() 如何在内部取消任务 Yield 关键字 补充知识点 TaskAwaiter 先说一下 TaskAwaiter,TaskAwaiter 表示等待异步任务完成的对象并为结果提供参数. Task 有个 GetAwaiter() 方法,会返回TaskAwaiter 或TaskAwaiter<TResult>,TaskAwaiter 类型在 System.Run
-
C#多线程系列之线程完成数
解决一个问题 假如,程序需要向一个 Web 发送 5 次请求,受网路波动影响,有一定几率请求失败.如果失败了,就需要重试. 示例代码如下: class Program { private static int count = 0; static void Main(string[] args) { for (int i = 0; i < 5; i++) new Thread(HttpRequest).Start(); // 创建线程 // 用于不断向另一个线程发送信号 while (count
-
C#多线程系列之进程同步Mutex类
Mutex 中文为互斥,Mutex 类叫做互斥锁.它还可用于进程间同步的同步基元. Mutex 跟 lock 相似,但是 Mutex 支持多个进程.Mutex 大约比 lock 慢 20 倍. 互斥锁(Mutex),用于多线程中防止两条线程同时对一个公共资源进行读写的机制. Windows 操作系统中,Mutex 同步对象有两个状态: signaled:未被任何对象拥有: nonsignaled:被一个线程拥有: Mutex 只能在获得锁的线程中,释放锁. 构造函数和方法 Mutex 类其构造函
-
C#多线程系列之原子操作
目录 知识点 竞争条件 线程同步 CPU时间片和上下文切换 阻塞 内核模式和用户模式 Interlocked 类 1,出现问题 2,Interlocked.Increment() 3,Interlocked.Exchange() 4,Interlocked.CompareExchange() 5,Interlocked.Add() 6,Interlocked.Read() 知识点 竞争条件 当两个或两个以上的线程访问共享数据,并且尝试同时改变它时,就发生争用的情况.它们所依赖的那部分共享数据,叫
-
C#多线程系列之资源池限制
Semaphore.SemaphoreSlim 类 两者都可以限制同时访问某一资源或资源池的线程数. 这里先不扯理论,我们从案例入手,通过示例代码,慢慢深入了解. Semaphore 类 这里,先列出 Semaphore 类常用的 API. 其构造函数如下: 构造函数 说明 Semaphore(Int32, Int32) 初始化 Semaphore 类的新实例,并指定初始入口数和最大并发入口数. Semaphore(Int32, Int32, String) 初始化 Semaphore 类的新实
-
C#多线程系列之线程池
目录 线程池 ThreadPool 常用属性和方法 线程池说明和示例 线程池线程数 线程池线程数说明 不支持的线程池异步委托 任务取消功能 计时器 线程池 线程池全称为托管线程池,线程池受 .NET 通用语言运行时(CLR)管理,线程的生命周期由 CLR 处理,因此我们可以专注于实现任务,而不需要理会线程管理. 线程池的应用场景:任务并行库 (TPL)操作.异步 I/O 完成.计时器回调.注册的等待操作.使用委托的异步方法调用和套接字连接. 很多人不清楚 Task.Task<TResult>
-
C#多线程系列之任务基础(一)
目录 多线程编程 多线程编程模式 探究优点 任务操作 两种创建任务的方式 Task.Run() 创建任务 取消任务 父子任务 任务返回结果以及异步获取返回结果 捕获任务异常 全局捕获任务异常 多线程编程 多线程编程模式 .NET 中,有三种异步编程模式,分别是基于任务的异步模式(TAP).基于事件的异步模式(EAP).异步编程模式(APM). 基于任务的异步模式 (TAP) :.NET 推荐使用的异步编程方法,该模式使用单一方法表示异步操作的开始和完成.包括我们常用的 async .await
-
C#多线程系列之线程通知
AutoRestEvent 类用于从一个线程向另一个线程发送通知. 微软文档是这样介绍的:表示线程同步事件在一个等待线程释放后收到信号时自动重置. 其构造函数只有一个: 构造函数里面的参数用于设置信号状态. 构造函数 说明 AutoResetEvent(Boolean) 用一个指示是否将初始状态设置为终止的布尔值初始化 AutoResetEvent 类的新实例. 真糟糕的机器翻译. 常用方法 AutoRestEvent 类是干嘛的,构造函数的参数又是干嘛的?不着急,我们来先来看看这个类常用的方法
-
C#多线程系列之线程的创建和生命周期
目录 1,获取当前线程信息 2,管理线程状态 2.1 启动与参数传递 2.1.1 ParameterizedThreadStart 2.1.2 使用静态变量或类成员变量 2.1.3 委托与Lambda 2.2 暂停与阻塞 2.3 线程状态 2.4 终止 2.5 线程的不确定性 2.6 线程优先级.前台线程和后台线程 2.7 自旋和休眠 1,获取当前线程信息 Thread.CurrentThread 是一个 静态的 Thread 类,Thread 的CurrentThread 属性,可以获取到当前
-
C#多线程系列之多阶段并行线程
前言 这一篇,我们将学习用于实现并行任务.使得多个线程有序同步完成多个阶段的任务. 应用场景主要是控制 N 个线程(可随时增加或减少执行的线程),使得多线程在能够在 M 个阶段中保持同步. 线程工作情况如下: 我们接下来 将学习C# 中的 Barrier ,用于实现并行协同工作. Barrier 类 使多个任务能够采用并行方式依据某种算法在多个阶段中协同工作,使多个线程(称为“参与者” )分阶段同时处理算法. 可以使多个线程(称为“参与者” )分阶段同时处理算法.(注意算法这个词) 每个参与者完
-
C#多线程系列之多线程锁lock和Monitor
目录 1,Lock lock 原型 lock 编写实例 2,Monitor 怎么用呢 解释一下 示例 设置获取锁的时效 1,Lock lock 用于读一个引用类型进行加锁,同一时刻内只有一个线程能够访问此对象.lock 是语法糖,是通过 Monitor 来实现的. Lock 锁定的对象,应该是静态的引用类型(字符串除外). 实际上字符串也可以作为锁的对象使用,只是由于字符串对象的特殊性,可能会造成不同位置的不同线程冲突.如果你能保证字符串的唯一性,例如 Guid 生成的字符串,也是可以作为锁的对
-
C#多线程系列之任务基础(二)
目录 判断任务状态 再说父子任务 组合任务/延续任务 复杂的延续任务 并行(异步)处理任务 并行(同步)处理任务 并行任务的 Task.WhenAny 并行任务状态 循环中值变化问题 定时任务 TaskScheduler 类 判断任务状态 属性 说明 IsCanceled 获取此 Task 实例是否由于被取消的原因而已完成执行. IsCompleted 获取一个值,它表示是否已完成任务. IsCompletedSuccessfully 了解任务是否运行到完成. IsFaulted 获取 Task