OpenCV实现图像细化算法
目录
- 1.基础概念
- 2.细化过程
- 3.代码实现
- 4.实验结果
1.基础概念
图像细化(Image Thinning),一般指二值图像的骨架化(Image Skeletonization)的一种操作运算。细化是将图像的线条从多像素宽度减少到单位像素宽度过程的简称,一些文章经常将细化结果描述为“骨架化”、“中轴转换”和“对称轴转换”。
细化技术的一个主要应用领域是位图矢量化的预处理阶段,相关研究表明,利用细化技术生成的位图的骨架质量受到多种因素的影响,其中包括图像自身的噪声、线条粗细不均匀、端点的确定以及线条交叉点选定等,因而对线划图像进行细化从而生成高质量骨架的方法进行研究具有现实意义。
根据算法处理步骤的不同,细化算法分为迭代细化算法和非迭代细化算法。根据检查像素方法的不同,迭代细化算法又分为串行细化算法和并行细化算法。
迭代算法:即重复删除图像边缘满足一定条件的像素,最终得到单像素宽带骨架。
迭代方法依据其检查像素的方法又可以再分成:
- 串行算法:在串行算法中,通过在每次迭代中用固定的次序检查像素来判断是否删除像素,在第n次迭代中像素p的删除取决于到执行过的所有操作,也就是必须在第(n-1)次迭代结果和第n次检测像素的基础之上进行像素删除操作;即是否删除像素在每次迭代的执行中是固定顺序的,它不仅取决于前次迭代的结果,也取决于本次迭代中已处理过像素点分布情况。
- 并行算法:在并行算法中,第n次迭代中像素的删除只取决于(n-1)次迭代后留下的结果,因此所有像素能在每次迭代中以并行的方式独立的被检测;即像素点删除与否与像素值图像中的顺序无关,仅取决于前次迭代效果。
2.细化过程
细化算法有ZS算法和查表法。ZS细化算法是一种基于8领域的并行细化算法,通过对目标像素8领域进行分布的算术逻辑运算,来确定该像素是否能删除。八领域如下图所示。
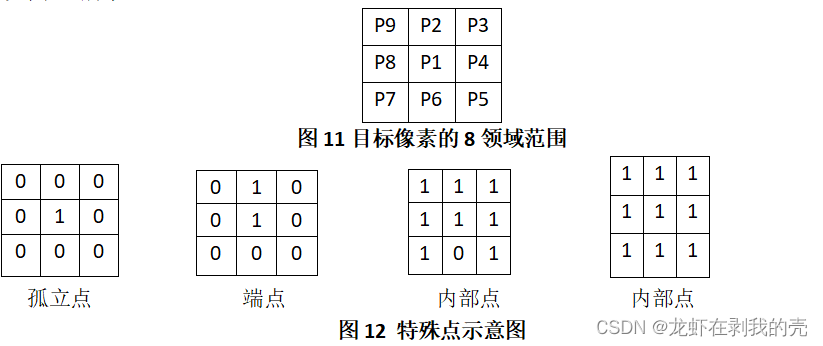
细化判断依据为:内部点不能删除、孤立不能删除、直线端点不能删除。
ZS细化过程如下:
第一次迭代,若P1满足以下四个条件,说明P1为边界点,可以删除,将P1值设为0:
(1)2 小于等于 Pi从i=2到i=9的和 小于等于6
(2)S(P1)=1;
(3)P2×P4×P6=0;
(4)P4×P6×P8=0;
条件(1)中若P2至P9的和在2至6之间,说明P1为边界点。S(P1)表示目标像素P1的8邻域中,顺时针变化一周像素由0变1的次数。在目标点8邻域P2-P9的范围内,像素值由0变1的次数只能为1次。条件(2)保证了图像细化后的连通性。
第二次迭代中,像素点如果满足第一次迭代中的条件(1)和(2)及以下条件,则移除该像素点:
(5)P2×P4×P8=0;
(6)P2×P6×P8=0;
重复以上迭代过程,直至处理完所有像素点,此时细化完成。
查表法中,由于输入的图像是一张二值图,将其归一化为像素值只有0和1的图像,然后对其进行卷积操作。具体卷积操作为:将目标点的八领域和卷积进行点乘,接着将所有值相加即可得表的索引M,下一步用索引值M去找表中对应的值,对应的值为0或1,就把目标点的像素值修改为0或1,其中1为不可删除点,0位可删除点。重复上述步骤,遍历完所有像素点,对目标点进行查表、修改目标像素值,最后得到细化结果。
3.代码实现
#include<iostream>
#include <opencv2\opencv.hpp>
using namespace std;
using namespace cv;
//查表法//
Mat lookUpTable(Mat& mat, int lut[])
{
Mat mat_in;
mat.convertTo(mat_in, CV_16UC1); //8 转 16
int MatX = mat_in.rows;
int MatY = mat_in.cols;
int num = 512;
//表的维数和卷积核中的数据有关,小矩阵初始化按行赋值
Mat kern = (Mat_<int>(3, 3) << 1, 8, 64, 2, 16, 128, 4, 32, 256); //卷积核
Mat mat_out = Mat::zeros(MatX, MatY, CV_16UC1);
Mat mat_expend = Mat::zeros(MatX + 2, MatY + 2, CV_16UC1);
Rect Roi(1, 1, MatY, MatX); //(列,行,列,行)
Mat mat_expend_Roi(mat_expend, Roi); //确定扩展矩阵的Roi区域
mat_in.copyTo(mat_expend_Roi); //将传入矩阵赋给Roi区域
Mat Mat_conv;
//实用卷积核和和每一个八邻域进行点乘再相加,其结果为表的索引,对应值为0能去掉,为1则不能去掉
filter2D(mat_expend, Mat_conv, mat_expend.depth(), kern); //卷积
Mat mat_index = Mat_conv(Rect(1, 1, MatY, MatX));
for (int i = 0; i < MatX; i++)
{
for (int j = 0; j < MatY; j++)
{
int matindex = mat_index.at<short>(i, j);
if ((matindex < num) && (matindex > 0))
{
mat_out.at<short>(i, j) = lut[matindex];
}
else if (matindex > num)
{
mat_out.at<short>(i, j) = lut[num - 1];
}
}
}
return mat_out;
}
//道路细化查表法//
Mat img_bone(Mat& mat)
{
// mat 为细化后的图像
Mat mat_in = mat;
//在数字图像处理时,只有单通道、三通道 8bit 和 16bit 无符号(即CV_16U)的 mat 才能被保存为图像
mat.convertTo(mat_in, CV_16UC1);
int lut_1[] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 0, 1, 1, 0, 0, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 0, 0, 0, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 1, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1 };
int lut_2[] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
1, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 0, 1, 1, 1, 1,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1 };
Mat mat_bool;
threshold(mat_in, mat_bool, 0, 1, THRESH_BINARY); //二值图像归一化
Mat mat_out;
Mat image_iters;
while (true)
{
mat_out = mat_bool;
//查表:水平、垂直
image_iters = lookUpTable(mat_bool, lut_1);
mat_bool = lookUpTable(image_iters, lut_2);
Mat diff = mat_out != mat_bool;
//countNonZero函数返回灰度值不为0的像素数
bool mat_equal = countNonZero(diff) == 0; //判断图像是否全黑
if (mat_equal)
{
break;
}
}
Mat Matout;
mat_bool.convertTo(Matout, CV_8UC1);
return Matout;
}
//主函数
int main()
{
Mat src_img, src_imgBool;
//输入道路二值图,参数 0 是指imread按单通道的方式读入图像,即灰白图像
src_img = imread("......png", 0);
//去掉噪,例如过滤很小或很大像素值的图像点
//threshold(src_img, src_imgBool, 0, 255, THRESH_OTSU);
//threshold(src_img, src_imgBool, 0, 155, THRESH_OTSU);
//imshow("Binary Image", src_imgBool);
Mat imgbone = img_bone(src_img);
//保存结果
imwrite("D:\\Desktop\\......\\细化222.png", imgbone * 255);
waitKey();
system("pause");
return 0;
}
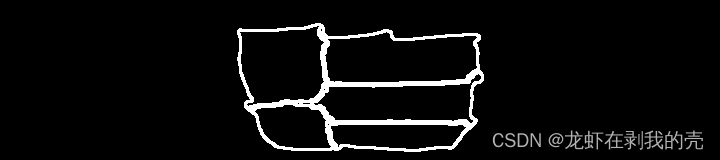
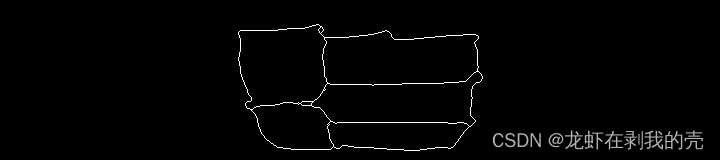
4.实验结果
细化前
细化后
到此这篇关于OpenCV实现图像细化算法的文章就介绍到这了,更多相关OpenCV 图像细化内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python-opencv获取二值图像轮廓及中心点坐标的代码
python-opencv获取二值图像轮廓及中心点坐标代码: groundtruth = cv2.imread(groundtruth_path)[:, :, 0] h1, w1 = groundtruth.shape contours, cnt = cv2.findContours(groundtruth.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) if len(contours) != 1:#轮廓总数 continue M = cv
-

Python Opencv实现图像轮廓识别功能
本文实例为大家分享了python opencv识别图像轮廓的具体代码,供大家参考,具体内容如下 要求:用矩形或者圆形框住图片中的云朵(不要求全部框出) 轮廓检测 Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓. import cv2 img = cv2.imread('cloud.jpg') # 灰度图像 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 二值化 ret, binary = cv2.th
-
详解利用OpenCV提取图像中的矩形区域(PPT屏幕等)
前言 最近参加了大创项目,题目涉及到计算机视觉,学姐发了个修正图像的博客链接,于是打算用这个题目入门OpenCV. 分析问题 照片中的PPT区域总是沿着x,y,z三个轴都有倾斜(如下图),要想把照片翻转到平行位置,需要进行透视变换,而透视变换需要同一像素点变换前后的坐标.由此可以想到,提取矩形区域四个角的坐标作为变换前的坐标,变换后的坐标可以设为照片的四个角落,经过投影变换,矩形区域将会翻转并充满图像. 因此我们要解决的问题变为:提取矩形的四个角落.进行透视变换. 提取矩形角落坐标 矩形的检测主
-
python-opencv在有噪音的情况下提取图像的轮廓实例
对于一般的图像提取轮廓,介绍了一个很好的方法,但是对于有噪声的图像,并不能很好地捕获到目标物体. 比如对于我的鼠标,提取的轮廓效果并不好,因为噪声很多: 所以本文增加了去掉噪声的部分. 首先加载原始图像,并显示图像 img = cv2.imread("temp.jpg") #载入图像 h, w = img.shape[:2] #获取图像的高和宽 cv2.imshow("Origin", img) 然后进行低通滤波处理,进行降噪 blured = cv2.blur(i
-
python opencv 图像拼接的实现方法
初级的图像拼接为将两幅图像简单的粘贴在一起,仅仅是图像几何空间的转移与合成,与图像内容无关.高级图像拼接也叫作基于特征匹配的图像拼接,拼接时消去两幅图像相同的部分,实现拼接合成全景图. 具有相同尺寸的图A和图B含有相同的部分与不同的部分,如图所示: 用基于特征的图像拼接实现后: 设图像高为h,相同部分的宽度为wx 拼接后图像的宽w=wA+wB-wx 因此,可以先构建一个高为h,宽为W*2的空白图像,将左图像向右平移wx,右图像粘贴在右侧.则右图像刚好覆盖左图像中的相同部分
-
Python OpenCV处理图像之图像像素点操作
本文实例为大家分享了Python OpenCV图像像素点操作的具体代码,供大家参考,具体内容如下 0x01. 像素 有两种直接操作图片像素点的方法: 第一种办法就是将一张图片看成一个多维的list,例如对于一张图片im,想要操作第四行第四列的像素点就直接 im[3,3] 就可以获取到这个点的RGB值. 第二种就是使用 OpenCV 提供的 Get1D. Get2D 等函数. 推荐使用第一种办法吧,毕竟简单. 0x02. 获取行和列像素 有一下四个函数: cv.GetCol(im, 0): 返回第
-
python opencv判断图像是否为空的实例
如下所示: import cv2 im = cv2.imread('2.jpg') if im is None: print("图像为空") # cv2.imshow("ss", im) # cv2.waitKey(0) 以上这篇python opencv判断图像是否为空的实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们.
-
python用opencv批量截取图像指定区域的方法
代码如下 import os import cv2 for i in range(1,201): if i==169 or i==189: i = i+1 pth = "C:\\Users\\Desktop\\asd\\"+str(i)+".bmp" image = cv2.imread(pth) //从指定路径读取图像 cropImg = image[600:1200,750:1500] //获取感兴趣区域 cv2.imwrite("C:\\Users\
-
基于OpenCV的PHP图像人脸识别技术
openCV是一个开源的用C/C++开发的计算机图形图像库,非常强大,研究资料很齐全.本文重点是介绍如何使用php来调用其中的局部的功能.人脸侦查技术只是openCV一个应用分支. 1.安装 从源代码编译成一个动态的so文件. 1.1.安装 OpenCV (OpenCV 1.0.0) 下载地址:http://sourceforge.net/project/showfiles.php?group_id=22870&package_id=16948 #tar xvzf OpenCV-1.0.0.ta
-
Python OpenCV读取png图像转成jpg图像存储的方法
如下所示: import os import cv2 import sys import numpy as np path = "F:\\ImageLib\\VRWorks_360_Video _SDK_1.1\\footage14\\" print(path) for filename in os.listdir(path): if os.path.splitext(filename)[1] == '.png': # print(filename) img = cv2.imread(