Python基于HOG+SVM/RF/DT等模型实现目标人行检测功能
当下基本所有的目标检测类的任务都会选择基于深度学习的方式,诸如:YOLO、SSD、RCNN等等,这一领域不乏有很多出色的模型,而且还在持续地推陈出新,模型的迭代速度很快,其实最早实现检测的时候还是基于机器学习去做的,HOG+SVM就是非常经典有效的一套框架,今天这里并不是说要做出怎样的效果,而是基于HOG+SVM来实践机器学习检测的流程。
这里为了方便处理,我是从网上找的一个数据集,主要是行人检测方向的,当然了这个用车辆检测、火焰检测等等的数据集都是可以的,本质都是一样的。
首先看下数据集,数据集主要分为两个类别,一个类别是包含行人的,另一个类别是不包含行人的,首先看下不包含行人的:
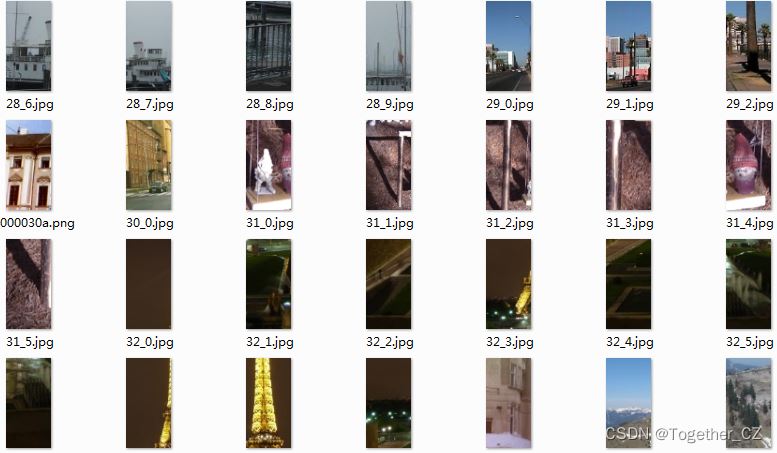
接下来看下包含行人的:
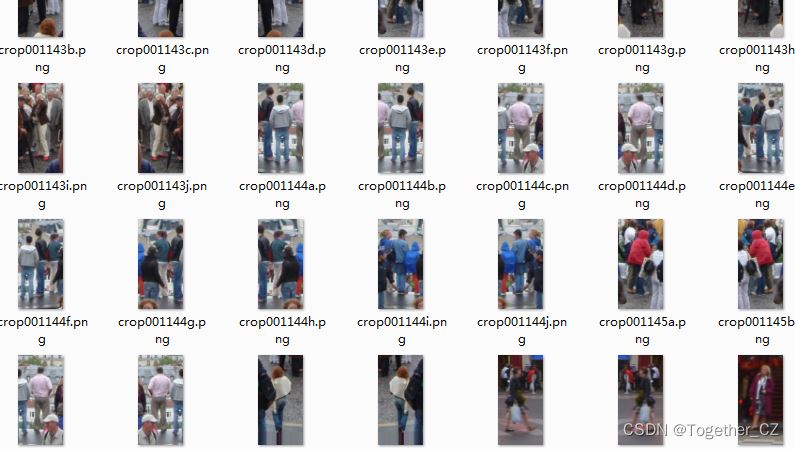
看到这里,其实就不难理解,这里的SVM扮演的主要作用就是二分类模型了。
接下来我们需要对原始图像的数据集进行特征提取计算,这里是基于HOG的方式实现的,可以自行实现HOG特征向量提取方法,也可以直接使用skimage提供的HOG提取器来一步实现,这里为了方便,我是直接使用的skimage提供的HOG方法,核心实现如下:
def img2Feature(dataDir="data/",save_path="feature.json"):
"""
特征提取计算
"""
feature=[]
for one_label in os.listdir(dataDir):
print("one_label: ", one_label)
oneDir=dataDir+one_label+'/'
for one_pic in os.listdir(oneDir):
one_path=oneDir+one_pic
print("one_path: ", one_path)
#加载图像
one_img = imread(one_path, as_gray=True)
one_vec = hog(one_img, orientations=orientations, pixels_per_cell=pixels_per_cell, cells_per_block=cells_per_block,
visualize=visualize, block_norm=normalize)
one_vec=one_vec.tolist()
one_vec.append(one_label)
feature.append(one_vec)
print("feature_length: ", len(feature))
with open(save_path,"w") as f:
f.write(json.dumps(feature))
HOG提取得到的向量维度很大,这里就不进行展示了。
之后就可以训练模型了,核心实现如下:
resDir = "results/"
if not os.path.exists(resDir):
os.makedirs(resDir)
data = "feature.json"
dict1 = DTModel(data=data, rationum=0.25, model_path=resDir + "DT.model")
dict2 = RFModel(data=data, rationum=0.25, model_path=resDir + "RF.model")
dict3 = SVMModel(data=data, rationum=0.25, model_path=resDir + "SVM.model")
res_dict = {}
res_dict["DT"], res_dict["RF"], res_dict["SVM"] = dict1, dict2, dict3
with open(resDir + "res_dict.json", "w") as f:
f.write(json.dumps(res_dict))
comparePloter(dict1, dict2, dict3, save_path=resDir + "comparePloter.jpg")
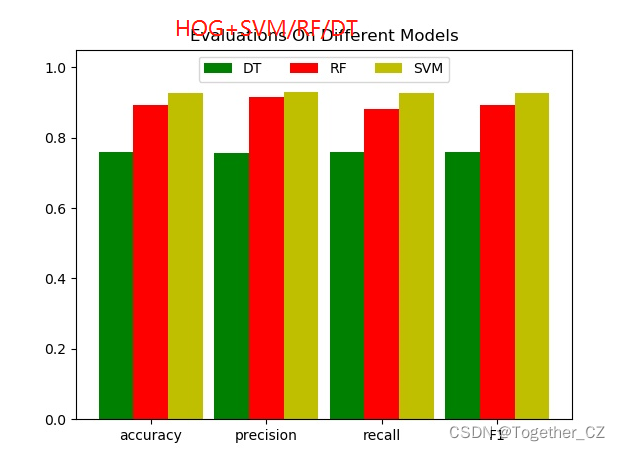
这里,我是同时使用了决策树DT、随机森林RF、支持向量机SVM三种模型来进行分类和对比可视化,对比结果如下:
{
"DT": {
"precision": 0.7573482282561567,
"recall": 0.7597846737437716,
"F1": 0.7584933696379963,
"accuracy": 0.7584933696379963
},
"RF": {
"precision": 0.9156160607479066,
"recall": 0.8801773928046967,
"F1": 0.893107332148193,
"accuracy": 0.893107332148193
},
"SVM": {
"precision": 0.9281402443868877,
"recall": 0.9272928963585789,
"F1": 0.9277128372009962,
"accuracy": 0.9277128372009962
}
}
为了直观展示,这里对三种模型的性能进行可视化展示,如下所示:
接下来我们对训练好的模型调用进行测试,查看具体的效果,随机选取了几张网上的图像,测试结果如下:
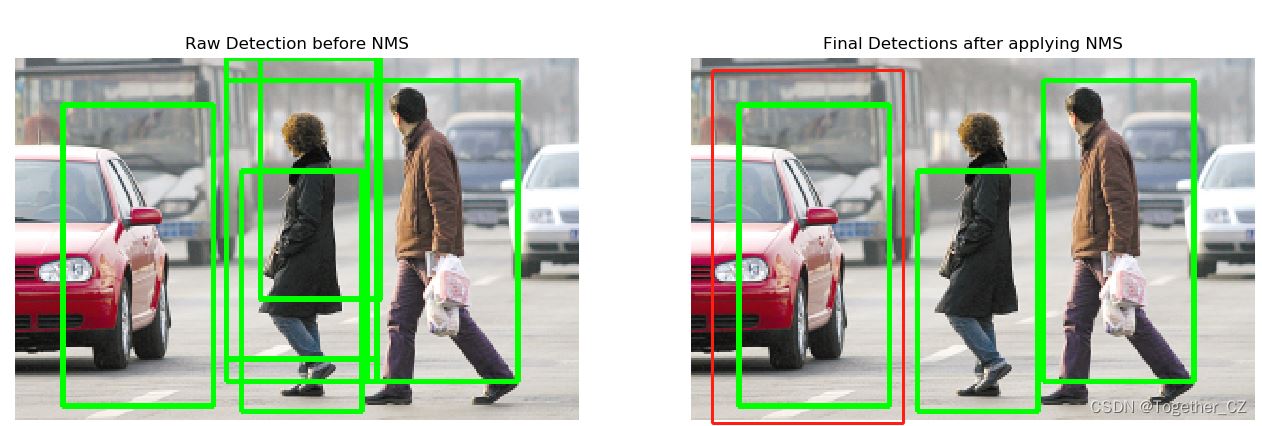
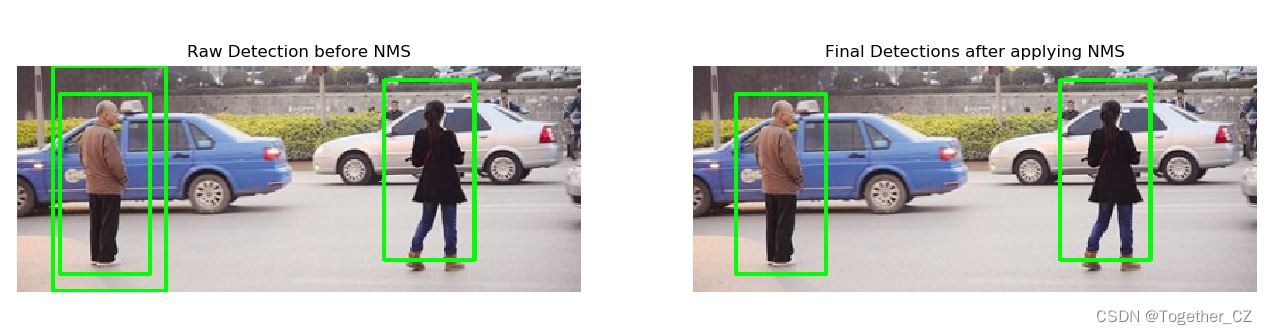
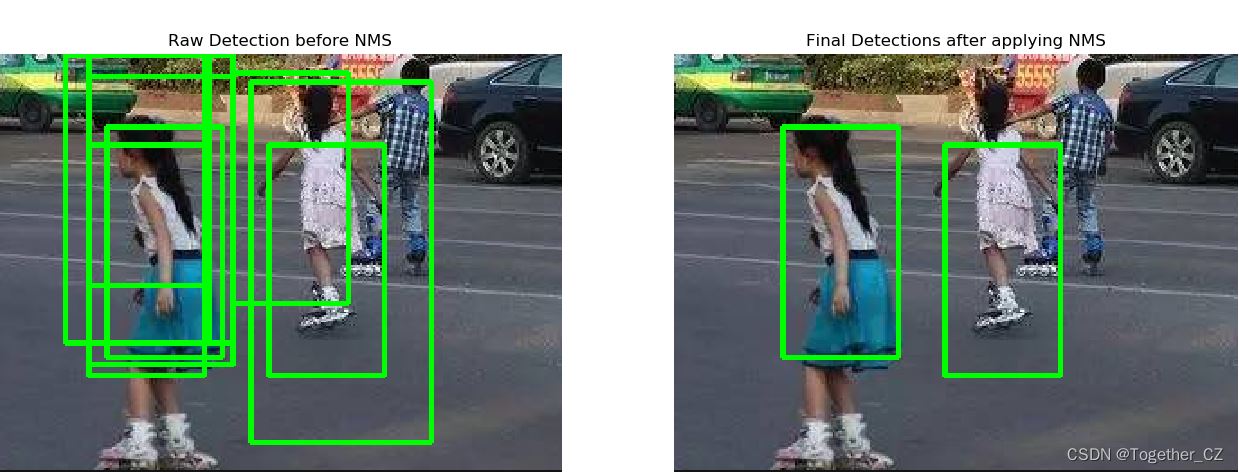
整体看下来,效果表现一般,不过这个也只是主要以实践流程为目的,并不是实际做项目的,而且各个环节都有优化提升的空间,模型的参数也都没有调过。
到此这篇关于Python基于HOG+SVM/RF/DT等模型实现目标检测[行人检测]的文章就介绍到这了,更多相关Python目标检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
python开启摄像头以及深度学习实现目标检测方法
最近想做实时目标检测,需要用到python开启摄像头,我手上只有两个uvc免驱的摄像头,性能一般.利用python开启摄像头费了一番功夫,主要原因是我的摄像头都不能用cv2的VideCapture打开,这让我联想到原来opencv也打不开Android手机上的摄像头(后来采用QML的Camera模块实现的).看来opencv对于摄像头的兼容性仍然不是很完善. 我尝了几种办法:v4l2,v4l2_capture以及simpleCV,都打不开.最后采用pygame实现了摄像头的采集功能,这里直接给大
-

Python+Flask编写一个简单的行人检测API
目录 前提条件 实验环境 项目结构 主要代码 运行结果 前提条件 1.了解Python语言,并会安装第三方库 2.了解Python Web Flask框架 3.了解PyTorch深度学习框架 实验环境 Python 3.6.2 PyTorch 1.7.1 Flask 1.1.1 Numpy 1.18.5 Opencv 3.4.2 PIL pip3 install pillow 项目结构 相关说明: static:用于存储静态文件,比如css.js和图片等 templates:存放模板文件 upl
-
OpenCV+python实现实时目标检测功能
环境安装 安装Anaconda,官网链接Anaconda 使用conda创建py3.6的虚拟环境,并激活使用 conda create -n py3.6 python=3.6 //创建 conda activate py3.6 //激活 3.安装依赖numpy和imutils //用镜像安装 pip install -i https://pypi.tuna.tsinghua.edu.cn/simple numpy pip install -i https://pypi.tuna.tsinghua
-
python目标检测基于opencv实现目标追踪示例
目录 主要代码 信息封装类 更新utils python-opencv3.0新增了一些比较有用的追踪器算法,这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 主要代码 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视者模块,负责入侵检测,目标跟踪 ''' class WatchDo
-
Python Opencv任意形状目标检测并绘制框图
opencv 进行任意形状目标识别,供大家参考,具体内容如下 工作中有一次需要在简单的图上进行目标识别,目标的形状不固定,并且存在一定程度上的噪声影响,但是噪声影响不确定.这是一个简单的事情,因为图像并不复杂,现在将代码公布如下: import cv2 def otsu_seg(img): ret_th, bin_img = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) return ret_th, bin_img d
-
python利用opencv调用摄像头实现目标检测
目录 使用到的库 实现思路 实现代码 2020/4/26更新:FPS计算 FPS记录的原理 FPS实现代码 使用到的库 好多人都想了解一下如何对摄像头进行调用,然后进行目标检测,于是我做了这个小BLOG. opencv-python==4.1.2.30 Pillow==6.2.1 numpy==1.17.4 这些都是通用的库,版本不同问题应该也不大. 实现思路 利用opencv调用摄像头,读取每一帧传入目标检测网络检测,将检测结果呈现. 由于本文所用的检测格式为RGB格式,CV2读取的时候会使用
-
Python 使用Opencv实现目标检测与识别的示例代码
在上章节讲述到图像特征检测与匹配 ,本章节是讲述目标检测与识别.后者是在前者的基础上进一步完善. 在本章中,我们使用HOG算法,HOG和SIFT.SURF同属一种类型的描述符.功能代码如下: import cv2 def is_inside(o, i): ox, oy, ow, oh = o ix, iy, iw, ih = i # 如果符合条件,返回True,否则返回False return ox > ix and oy > iy and ox + ow < ix + iw and o
-
Python+OpenCV内置方法实现行人检测
您是否知道 OpenCV 具有执行行人检测的内置方法? OpenCV 附带一个预训练的 HOG + 线性 SVM 模型,可用于在图像和视频流中执行行人检测. 今天我们使用Opencv自带的模型实现对视频流中的行人检测,只需打开一个新文件,将其命名为 detect.py ,然后加入代码: # import the necessary packages from __future__ import print_function import numpy as np import argparse i
-
Python基于HOG+SVM/RF/DT等模型实现目标人行检测功能
当下基本所有的目标检测类的任务都会选择基于深度学习的方式,诸如:YOLO.SSD.RCNN等等,这一领域不乏有很多出色的模型,而且还在持续地推陈出新,模型的迭代速度很快,其实最早实现检测的时候还是基于机器学习去做的,HOG+SVM就是非常经典有效的一套框架,今天这里并不是说要做出怎样的效果,而是基于HOG+SVM来实践机器学习检测的流程. 这里为了方便处理,我是从网上找的一个数据集,主要是行人检测方向的,当然了这个用车辆检测.火焰检测等等的数据集都是可以的,本质都是一样的. 首先看下数据集,数据
-
Python基于list的append和pop方法实现堆栈与队列功能示例
本文实例讲述了Python基于list的append和pop方法实现堆栈与队列功能.分享给大家供大家参考,具体如下: #coding=utf8 ''''' 堆栈: 堆栈是一个后进先出(LIFO)的数据结构. 在栈上"push"元素是个常用术语,意思是把一个对象添加到堆栈中. 删除一个元素,可以把它"pop"出堆栈. 队列: 队列是一种先进先出(FIFO)的数据类型. 新的元素通过"入队"的方式添加进队列的末尾, "出对"就是从
-
python基于隐马尔可夫模型实现中文拼音输入
在网上看到一篇关于隐马尔科夫模型的介绍,觉得简直不能再神奇,又在网上找到大神的一篇关于如何用隐马尔可夫模型实现中文拼音输入的博客,无奈大神没给可以运行的代码,只能纯手动网上找到了结巴分词的词库,根据此训练得出隐马尔科夫模型,用维特比算法实现了一个简单的拼音输入法.githuh地址:https://github.com/LiuRoy/Pinyin_Demo 原理简介隐马尔科夫模型 抄一段网上的定义: 隐马尔可夫模型 (Hidden Markov Model) 是一种统计模型,用来描述一个含有隐含未
-
python实现隐马尔科夫模型HMM
一份完全按照李航<<统计学习方法>>介绍的HMM代码,供大家参考,具体内容如下 #coding=utf8 ''''' Created on 2017-8-5 里面的代码许多地方可以精简,但为了百分百还原公式,就没有精简了. @author: adzhua ''' import numpy as np class HMM(object): def __init__(self, A, B, pi): ''''' A: 状态转移概率矩阵 B: 输出观察概率矩阵 pi: 初始化状态向量 '
-
python+opencv3.4.0 实现HOG+SVM行人检测的示例代码
参照opencv官网例程写了一个基于python的行人检测程序,实现了和自带检测器基本一致的检测效果. 网址 :https://docs.opencv.org/3.4.0/d5/d77/train_HOG_8cpp-example.html opencv版本:3.4.0 训练集和opencv官方用了同一个,可以从http://pascal.inrialpes.fr/data/human/下载,在网页的最下方"here(970MB处)",用迅雷下载比较快(500kB/s).训练集文件比较
-
Python实现随机森林RF模型超参数的优化详解
目录 1 代码分段讲解 1.1 数据与模型准备 1.2 超参数范围给定 1.3 超参数随机匹配择优 1.4 超参数遍历匹配择优 1.5 模型运行与精度评定 2 完整代码 本文介绍基于Python的随机森林(Random Forest,RF)回归代码,以及模型超参数(包括决策树个数与最大深度.最小分离样本数.最小叶子节点样本数.最大分离特征数等)自动优化的代码. 本文是在上一篇文章Python实现随机森林RF并对比自变量的重要性的基础上完成的,因此本次仅对随机森林模型超参数自动择优部分的代码加以详
-
Python基于sklearn库的分类算法简单应用示例
本文实例讲述了Python基于sklearn库的分类算法简单应用.分享给大家供大家参考,具体如下: scikit-learn已经包含在Anaconda中.也可以在官方下载源码包进行安装.本文代码里封装了如下机器学习算法,我们修改数据加载函数,即可一键测试: # coding=gbk ''' Created on 2016年6月4日 @author: bryan ''' import time from sklearn import metrics import pickle as pickle
-
Python基于Dlib的人脸识别系统的实现
之前已经介绍过人脸识别的基础概念,以及基于opencv的实现方式,今天,我们使用dlib来提取128维的人脸嵌入,并使用k临近值方法来实现人脸识别. 人脸识别系统的实现流程与之前是一样的,只是这里我们借助了dlib和face_recognition这两个库来实现.face_recognition是对dlib库的包装,使对dlib的使用更方便.所以首先要安装这2个库. pip3 install dlib pip3 install face_recognition 然后,还要安装imutils库 p
-
python基于机器学习预测股票交易信号
引言 近年来,随着技术的发展,机器学习和深度学习在金融资产量化研究上的应用越来越广泛和深入.目前,大量数据科学家在Kaggle网站上发布了使用机器学习/深度学习模型对股票.期货.比特币等金融资产做预测和分析的文章.从金融投资的角度看,这些文章可能缺乏一定的理论基础支撑(或交易思维),大都是基于数据挖掘.但从量化的角度看,有很多值得我们学习参考的地方,尤其是Pyhton的深入应用.数据可视化和机器学习模型的评估与优化等.下面借鉴Kaggle上的一篇文章<Building an Asset Trad
-
Python基于LightGBM进行时间序列预测
目录 前言 特征 代码 结果 前言 当我们考虑时间序列的增强树时,通常会想到 M5 比赛,其中前十名中有很大一部分使用了 LightGBM.但是当在单变量情况下使用增强树时,由于没有大量的外生特征可以利用,它的性能非常的糟糕. 首先需要明确的是M4 比赛的亚军 DID 使用了增强树.但是它作为一个元模型来集成其他更传统的时间序列方法.在 M4 上公开的代码中,所有标准增强树的基准测试都相当糟糕,有时甚至还达不到传统的预测方法.下面是Sktime 包和他们的论文所做的出色工作[1]: 任何带有“X