利用python实现AR教程
先了解如何利用python语言实现以平面和标记物进行姿态估计
本实验只是先实现一个简单的小例子。简单来说就是先识别出图像中的参考面,再拍摄一张目标图像,将参考面顶部的3D模型投影到目标图像上。
大致步骤如下:
识别参考平面
在这一步中,我们所需要做的事就是提取参考图像和目标图像的sift特征,然后使用RANSAC算法稳健地估计单应性矩阵。
代码如下:
#计算特征
sift.process_image('D:输入图片/book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('D:输入图片/book_per.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
#匹配特征,并计算单应性矩阵
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
由上面代码可得到单应性矩阵,它能够将一幅图像中标记物的点映射到另一幅图像中的对应点。还需要建立X-Y(Z=0)三维坐标系,标记物在Z=0平面上,原点在标记物的某个位置上。
从单应性推导出从参考面坐标系到目标图像坐标系的转换
在进行坐标转换之前,为了检验单应性矩阵结果的正确性,需要将一些三维物体放置在目标图像上,本实验使用了一个立方体。产生立方体的代码如下:
def cube_points(c, wid): p = [] p.append([c[0]-wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]-wid, c[2]-wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]-wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]+wid]) p.append([c[0]-wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]-wid]) p.append([c[0]+wid, c[1]+wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]+wid]) p.append([c[0]+wid, c[1]-wid, c[2]-wid] return array(p).T
先计算出照相机的标定矩阵,就可以得出两个视图间的相对变换
代码如下:
#计算照相机标定矩阵,使用图像的分辨率为747*1000 K = my_calibration((747, 1000)) #位于边长为0.2,Z=0平面上的三维点 box = cube_points([0, 0, 0.1], 0.1) #投影第一幅图像上底部的正方形 cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]]))))) #底部正方形上的点 box_cam1 = cam1.project(homography.make_homog(box[:, :5])) #使用H将点变换到第二幅图像上 box_trans = homography.normalize(dot(H,box_cam1)) #从cam1和H中计算第二个照相机矩阵 cam2 = camera.Camera(dot(H, cam1.P)) A = dot(linalg.inv(K), cam2.P[:, :3]) A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T cam2.P[:, :3] = dot(K, A) #使用第二个照相机矩阵投影 box_cam2 = cam2.project(homography.make_homog(box))
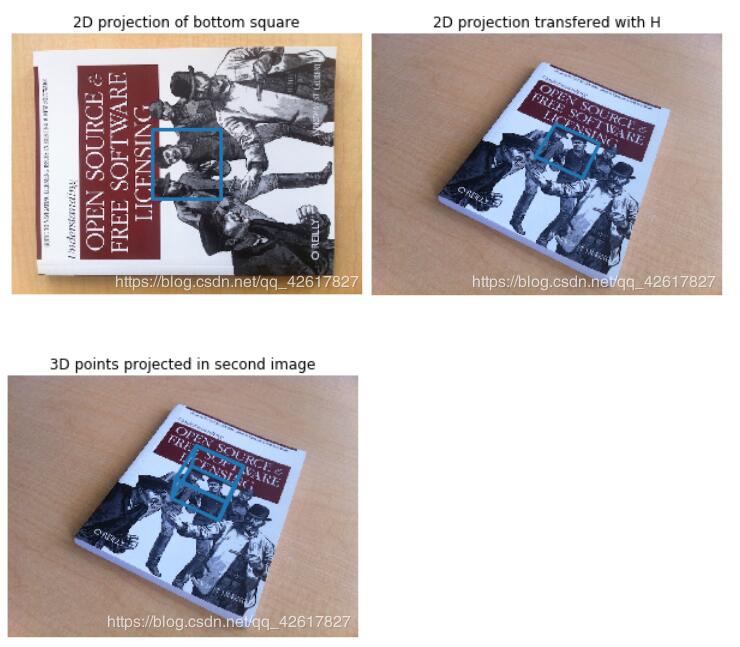
在图像(像素空间)中投影我们的3D模型并绘制它。
#底部正方形的二维投影
figure()
imshow(im0)
plot(box_cam1[0, :], box_cam1[1, :], linewidth=3)
title('2D projection of bottom square')
axis('off')
#使用H对二维投影进行变换
figure()
imshow(im1)
plot(box_trans[0, :], box_trans[1, :], linewidth=3)
title('2D projection transfered with H')
axis('off')
#三维立方体
figure()
imshow(im1)
plot(box_cam2[0, :], box_cam2[1, :], linewidth=3)
title('3D points projected in second image')
axis('off')
实验结果如下
什么是AR
AR全称Augmented Reality,意为增强现实技术。
它是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术,是把原本在现实世界的一定时间空间范围内很难体验到的实体信息(视觉信息,声音,味道,触觉等),通过电脑等科学技术,模拟仿真后再叠加,将虚拟的信息应用到真实世界,被人类感官所感知,从而达到超越现实的感官体验。真实的环境和虚拟的物体实时地叠加到了同一个画面或空间同时存在。
增强现实技术,不仅展现了真实世界的信息,而且将虚拟的信息同时显示出来,两种信息相互补充、叠加。在视觉化的增强现实中,用户利用头盔显示器,把真实世界与电脑图形多重合成在一起,便可以看到真实的世界围绕着它。
增强现实技术包含了多媒体、三维建模、实时视频显示及控制、多传感器融合、实时跟踪及注册、场景融合等新技术与新手段。增强现实提供了在一般情况下,不同于人类可以感知的信息。
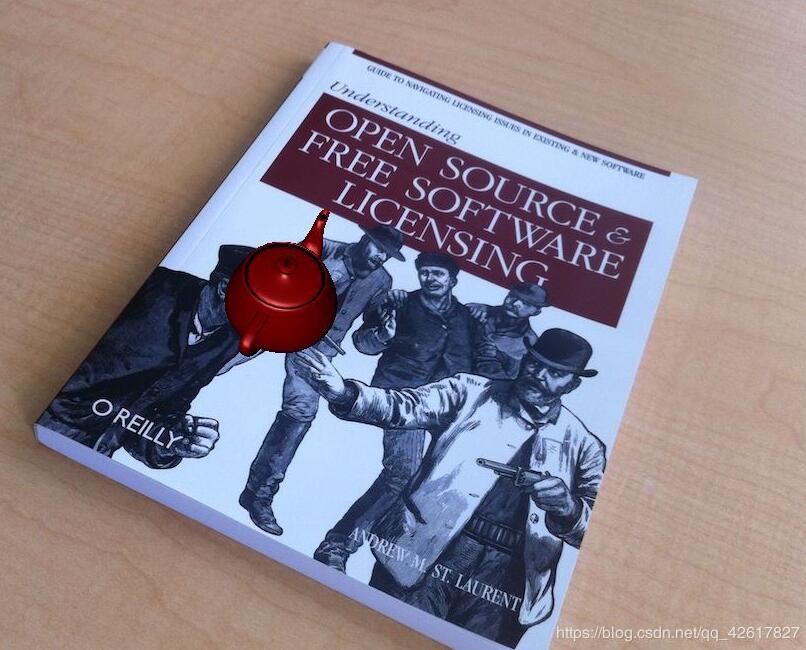
如何利用python实现AR
步骤和实现姿态估计无太大差别。由上述内容计算出照相机的位置和姿态,使用这些信息来放置计算机图像学模型。这里我们放置了一个红色的小茶壶。
在运行代码之前,我们需要先安装PyGame和PyOpenGL,下载链接(https://www.lfd.uci.edu/~gohlke/pythonlibs/)。
核心代码如下:
def set_projection_from_camera(K):
#从照相机标定矩阵中获得视图
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0,0]
fy = K[1,1]
fovy = 2*math.atan(0.5*height/fy)*180/math.pi
aspect = (width*fy)/(height*fx)
near = 0.1
far = 100.0
gluPerspective(fovy,aspect,near,far)
glViewport(0,0,width,height)
def set_modelview_from_camera(Rt):
#从照相机姿态中获取模拟视图矩阵
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1,0,0],[0,0,-1],[0,1,0]])
R = Rt[:,:3]
U,S,V = np.linalg.svd(R)
R = np.dot(U,V)
R[0,:] = -R[0,:]
t = Rt[:,3]
M = np.eye(4)
M[:3,:3] = np.dot(R,Rx)
M[:3,3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
#使用四边形绘制背景图像
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image,"RGBX",1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D,glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D,0,GL_RGBA,width,height,0,GL_RGBA,GL_UNSIGNED_BYTE,bg_data)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MAG_FILTER,GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D,GL_TEXTURE_MIN_FILTER,GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0,0.0); glVertex3f(-1.0,-1.0,-1.0)
glTexCoord2f(1.0,0.0); glVertex3f( 1.0,-1.0,-1.0)
glTexCoord2f(1.0,1.0); glVertex3f( 1.0, 1.0,-1.0)
glTexCoord2f(0.0,1.0); glVertex3f(-1.0, 1.0,-1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
#在原点处绘制红色茶壶
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT,GL_AMBIENT,[0,0,0,0])
glMaterialfv(GL_FRONT,GL_DIFFUSE,[0.5,0.0,0.0,0.0])
glMaterialfv(GL_FRONT,GL_SPECULAR,[0.7,0.6,0.6,0.0])
glMaterialf(GL_FRONT,GL_SHININESS,0.25*128.0)
glutSolidTeapot(size)
width,height = 1000,747
def setup():
pygame.init()
pygame.display.set_mode((width,height),OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
实验结果如图:
运行代码遇到的错误及解决方案
错误如下:An error ocurred while starting the kernelfreeglut ERROR: Function called without first calling ‘glutInit'.
原因:经大神指点得知这个错误是freeglut和glut共存的缘故,它们俩定义了相同的方法,这个是动态链接库的重叠问题,我的在ana\Lib\site-packages\OpenGL\DLLS文件夹里面。
你需要删除freeglut.vc15.dll这个文件。我这是已经删除完的样子。
以上这篇利用python实现AR教程就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
使用python实现画AR模型时序图
背景: 用python画AR模型的时序图. 结果: 代码: import numpy as np import matplotlib.pyplot as plt """ AR(1)的时序图:x[t]=a*x[t-1]+e """ num = 2000 e = np.random.rand(num) x = np.empty(num) """ 平稳AR(1) """ a = -0.5 x[
-
利用python实现AR教程
先了解如何利用python语言实现以平面和标记物进行姿态估计 本实验只是先实现一个简单的小例子.简单来说就是先识别出图像中的参考面,再拍摄一张目标图像,将参考面顶部的3D模型投影到目标图像上. 大致步骤如下: 识别参考平面 在这一步中,我们所需要做的事就是提取参考图像和目标图像的sift特征,然后使用RANSAC算法稳健地估计单应性矩阵. 代码如下: #计算特征 sift.process_image('D:输入图片/book_frontal.JPG', 'im0.sift') l0, d0 =
-
利用Python的turtle库绘制玫瑰教程
turtle的文档:https://docs.python.org/3/library/turtle.html 用Python的turtle库绘图是很简单的,闲来无事就画了一个玫瑰花,下面奉上源码.... 源码: ''' Created on Nov 18, 2017 @author: QiZhao ''' import turtle # 设置初始位置 turtle.penup() turtle.left(90) turtle.fd(200) turtle.pendown() turtle.ri
-
利用Python构建Flutter应用的教程详解
目录 关于FLET 如何安装 FLET 简单介绍 Flutter 用 FLET 构建简单的应用程序 用户界面 你知道可以用 Python 来构建 flutter 应用吗? Flutter 在软件研发领域是非常流行的,今天就让我们深入了解一下,用 Python 构建 flutter 应用程序的世界! 关于FLET 在开始学习前,了解一下什么是 FLET? FLET 可以使开发人员通过 Python,轻松地构建实时 Web.移动和桌面应用程序,更加疯狂的是不需要你有前端经验,也能让你开发出稳定的 W
-
Linux下利用python实现语音识别详细教程
目录 语音识别工作原理简介 选择合适的python语音识别包 安装SpeechRecognition 识别器类 音频文件的使用 英文的语音识别 噪音对语音识别的影响 麦克风的使用 中文的语音识别 小范围中文识别 语音合成 语音识别工作原理简介 语音识别源于 20 世纪 50 年代早期在贝尔实验室所做的研究.早期语音识别系统仅能识别单个讲话者以及只有约十几个单词的词汇量.现代语音识别系统已经取得了很大进步,可以识别多个讲话者,并且拥有识别多种语言的庞大词汇表.语音识别的首要部分当然是语音.通过麦克
-

利用python实现简单的情感分析实例教程
目录 1 数据导入及预处理 1.1 数据导入 1.2 数据描述 1.3 数据预处理 2 情感分析 2.1 情感分 2.2 情感分直方图 2.3 词云图 2.4 关键词提取 3 积极评论与消极评论 3.1 积极评论与消极评论占比 3.2 消极评论分析 总结 python实现简单的情感分析 1 数据导入及预处理 1.1 数据导入 # 数据导入 import pandas as pd data = pd.read_csv('../data/京东评论数据.csv') data.head() 1.2 数据
-
如何利用python进行时间序列分析
题记:毕业一年多天天coding,好久没写paper了.在这动荡的日子里,也希望写点东西让自己静一静.恰好前段时间用python做了一点时间序列方面的东西,有一丁点心得体会想和大家分享下.在此也要特别感谢顾志耐和散沙,让我喜欢上了python. 什么是时间序列 时间序列简单的说就是各时间点上形成的数值序列,时间序列分析就是通过观察历史数据预测未来的值.在这里需要强调一点的是,时间序列分析并不是关于时间的回归,它主要是研究自身的变化规律的(这里不考虑含外生变量的时间序列). 为什么用python
-
利用Python学习RabbitMQ消息队列
RabbitMQ可以当做一个消息代理,它的核心原理非常简单:即接收和发送消息,可以把它想象成一个邮局:我们把信件放入邮箱,邮递员就会把信件投递到你的收件人处,RabbitMQ就是一个邮箱.邮局.投递员功能综合体,整个过程就是:邮箱接收信件,邮局转发信件,投递员投递信件到达收件人处. RabbitMQ和邮局的主要区别就是RabbitMQ接收.存储和发送的是二进制数据----消息. rabbitmq基本管理命令: 一步启动Erlang node和Rabbit应用:sudo rabbitmq-serv
-
Python简明入门教程
本文实例讲述了Python简明入门教程.分享给大家供大家参考.具体如下: 一.基本概念 1.数 在Python中有4种类型的数--整数.长整数.浮点数和复数. (1)2是一个整数的例子. (2)长整数不过是大一些的整数. (2)3.23和52.3E-4是浮点数的例子.E标记表示10的幂.在这里,52.3E-4表示52.3 * 10-4. (4)(-5+4j)和(2.3-4.6j)是复数的例子. 2.字符串 (1)使用单引号(') (2)使用双引号(") (3)使用三引号('''或"&q
-
Python Flask基础教程示例代码
本文研究的主要是Python Flask基础教程,具体介绍如下. 安装:pip install flask即可 一个简单的Flask from flask import Flask #导入Flask app = Flask(__name__) #创建一个Flask实例 #设置路由,即url @app.route('/') #url对应的函数 def hello_world(): #返回的页面 return 'Hello World!' #这个不是作为模块导入的时候运行,比如这个文件为aa.py,
-
利用Python代码实现数据可视化的5种方法详解
前言 数据科学家并不逊色于艺术家.他们用数据可视化的方式绘画,试图展现数据内隐藏的模式或表达对数据的见解.更有趣的是,一旦接触到任何可视化的内容.数据时,人类会有更强烈的知觉.认知和交流. 数据可视化是数据科学家工作中的重要组成部分.在项目的早期阶段,你通常会进行探索性数据分析(Exploratory Data Analysis,EDA)以获取对数据的一些理解.创建可视化方法确实有助于使事情变得更加清晰易懂,特别是对于大型.高维数据集.在项目结束时,以清晰.简洁和引人注目的方式展现最终结果是非常