Python+OpenCV实现图像的全景拼接
本文实例为大家分享了Python+OpenCV实现图像的全景拼接的具体代码,供大家参考,具体内容如下
环境:python3.5.2 + openCV3.4
1.算法目的
将两张相同场景的场景图片进行全景拼接。
2.算法步骤
本算法基本步骤有以下几步:
步骤1:将图形先进行桶形矫正
没有进行桶形变换的图片效果可能会像以下这样:

图片越多拼接可能就会越夸张。
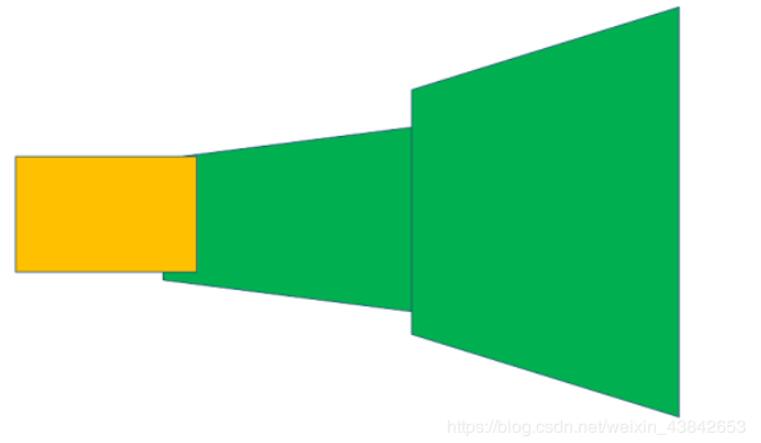
本算法是将图片进行桶形矫正。目的就是来缩减透视变换(Homography)之后图片产生的变形,从而使拼接图片变得畸形。
步骤2:特征点匹配
本算法使用的sift算法匹配,它具有旋转不变性和缩放不变性,具体原理在之后会补上一篇关于sift算法的文章,这里就不做详细介绍。
在匹配特征点的过程中,透视矩阵选取了4对特征点计算,公式为

点的齐次坐标依赖于其尺度定义,因此矩阵H也仅依赖尺度定义,所以,单应性矩阵具有8个独立的自由度。
如果在选取的不正确的特征点,那么透视矩阵就可能计算错误,所以为了提高结果的鲁棒性,就要去除这些错误的特征点,而RANSAC方法就是用来删除这些错误的特征点。
**RANSAC:**用来找到正确模型来拟合带有噪声数据的迭代方法。基本思想:数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摈弃噪声点。
RANSAC方法随机获取4对不同的特征匹配坐标,计算出透视矩阵H1,再将第二张图的特征匹配点经过这个矩阵H1映射到第一张图的坐标空间里,通过计算来验证这个H1矩阵是否满足绝大部分的特征点。
通过迭代多次,以满足最多特征匹配点的特征矩阵H作为结果。
这样正常情况就可以去除错误的特征点了,除非匹配错误的特征点比正确的还多。
下图是我在嘉庚图书馆旁拍摄的照片的特征点匹配。

步骤3:利用得到的变换矩阵进行图片的拼接。
可以看出基本做到了无缝拼接。只是在色差上还是看得出衔接的部分存在。

实现结果
我在宿舍里又多照了几组照片来实验:
室内宿舍场景的特征点匹配:

拼接结果:

在室内的效果根据结果来看效果也还可以。
我测试了宿舍里景深落差较大的两张图片:
特征点匹配:
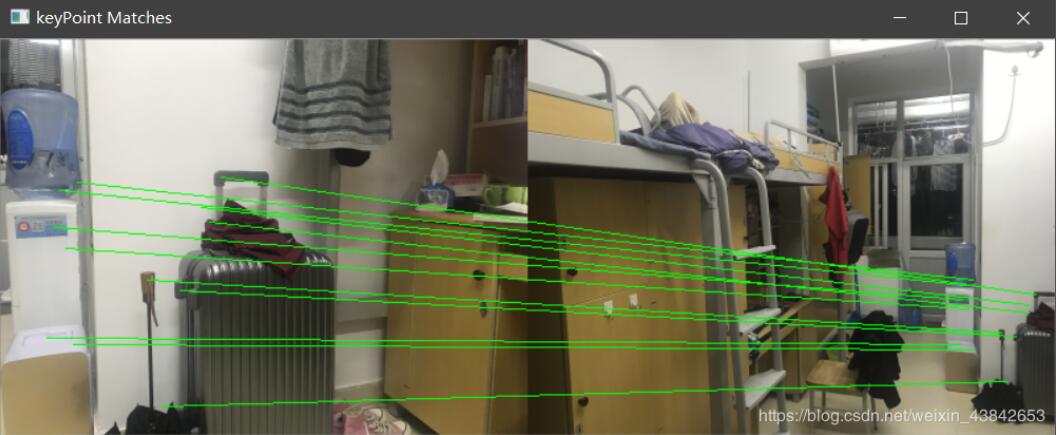
虽然距离较远,但是还是可以粗略的匹配到特征点。
拼接结果:

从结果上来看可以看得出来,两张图片依然可以正确而粗略地拼接再一起,可以看得出是同一个区域。只是由于特征点不够,在细节上景深落差较大的还是没办法完美地拼接。
import numpy as np
import cv2 as cv
import imutils
class Stitcher:
def __init__(self):
self.isv3 = imutils.is_cv3()
def stitch(self,imgs, ratio = 0.75, reprojThresh = 4.0, showMatches = False):
print('A')
(img2, img1) = imgs
#获取关键点和描述符
(kp1, des1) = self.detectAndDescribe(img1)
(kp2, des2) = self.detectAndDescribe(img2)
print(len(kp1),len(des1))
print(len(kp2), len(des2))
R = self.matchKeyPoints(kp1, kp2, des1, des2, ratio, reprojThresh)
#如果没有足够的最佳匹配点,M为None
if R is None:
return None
(good, M, mask) = R
print(M)
#对img1透视变换,M是ROI区域矩阵, 变换后的大小是(img1.w+img2.w, img1.h)
result = cv.warpPerspective(img1, M, (img1.shape[1] + img2.shape[1], img1.shape[0]))
#将img2的值赋给结果图像
result[0:img2.shape[0], 0:img2.shape[1]] = img2
#是否需要显示ROI区域
if showMatches:
vis = self.drawMatches1(img1, img2, kp1, kp2, good, mask)
return (result, vis)
return result
def detectAndDescribe(self,img):
print('B')
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
#检查我们使用的是否是penCV3.x
if self.isv3:
sift = cv.xfeatures2d.SIFT_create()
(kps, des) = sift.detectAndCompute(img, None)
else:
sift = cv.FastFeatureDetector_create('SIFT')
kps = sift.detect(gray)
des = sift.compute(gray, kps)
kps = np.float32([kp.pt for kp in kps]) # **********************************
#返回关键点和描述符
return (kps, des)
def matchKeyPoints(self,kp1, kp2, des1, des2, ratio, reprojThresh):
print('C')
#初始化BF,因为使用的是SIFT ,所以使用默认参数
matcher = cv.DescriptorMatcher_create('BruteForce')
# bf = cv.BFMatcher()
# matches = bf.knnMatch(des1, des2, k=2)
matches = matcher.knnMatch(des1, des2, 2) #***********************************
#获取理想匹配
good = []
for m in matches:
if len(m) == 2 and m[0].distance < ratio * m[1].distance:
good.append((m[0].trainIdx, m[0].queryIdx))
print(len(good))
#最少要有四个点才能做透视变换
if len(good) > 4:
#获取关键点的坐标
# src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
# dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2)
src_pts = np.float32([kp1[i] for (_, i) in good])
dst_pts = np.float32([kp2[i] for (i, _) in good])
#通过两个图像的关键点计算变换矩阵
(M, mask) = cv.findHomography(src_pts, dst_pts, cv.RANSAC, reprojThresh)
#返回最佳匹配点、变换矩阵和掩模
return (good, M, mask)
#如果不满足最少四个 就返回None
return None
def drawMatches(img1, img2, kp1, kp2, matches, mask, M):
# 获得原图像的高和宽
h, w = img1.shape[:2]
# 使用得到的变换矩阵对原图像的四个角进行变换,获得目标图像上对应的坐标
pts = np.float32([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv.perspectiveTransform(pts, M)
matchesMask = mask.ravel().tolist()
draw_params = dict(matchColor = (0, 255, 0),
singlePointColor = None,
matchesMask = matchesMask,
flags = 2)
img = cv.drawMatches(img1, kp1, img2, kp2, matches, None, **draw_params)
return img
def drawMatches1(self,img1, img2, kp1, kp2, metches,mask):
print('D')
(hA,wA) = img1.shape[:2]
(hB,wB) = img2.shape[:2]
vis = np.zeros((max(hA,hB), wA+wB, 3), dtype='uint8')
vis[0:hA, 0:wA] = img1
vis[0:hB, wA:] = img2
for ((trainIdx, queryIdx),s) in zip(metches, mask):
if s == 1:
ptA = (int(kp1[queryIdx][0]), int(kp1[queryIdx][1]))
ptB = (int(kp2[trainIdx][0])+wA, int(kp2[trainIdx][1]))
cv.line(vis, ptA, ptB, (0, 255, 0), 1)
return vis
# def show():
# img1 = cv.imread('image/sedona_left_01.png')
# img2 = cv.imread('image/sedona_right_01.png')
# img1 = imutils.resize(img1, width=400)
# img2 = imutils.resize(img2, width=400)
#
# stitcher = cv.Stitcher()
# (result, vis) = stitcher.stitch([img1, img2])
# # (result, vis) = stitch([img1,img2], showMatches=True)
#
# cv.imshow('image A', img1)
# cv.imshow('image B', img2)
# cv.imshow('keyPoint Matches', vis)
# cv.imshow('Result', result)
#
# cv.waitKey(0)
# cv.destroyAllWindows()
# show()
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持我们。
相关推荐
-
python opencv 图像拼接的实现方法
初级的图像拼接为将两幅图像简单的粘贴在一起,仅仅是图像几何空间的转移与合成,与图像内容无关.高级图像拼接也叫作基于特征匹配的图像拼接,拼接时消去两幅图像相同的部分,实现拼接合成全景图. 具有相同尺寸的图A和图B含有相同的部分与不同的部分,如图所示: 用基于特征的图像拼接实现后: 设图像高为h,相同部分的宽度为wx 拼接后图像的宽w=wA+wB-wx 因此,可以先构建一个高为h,宽为W*2的空白图像,将左图像向右平移wx,右图像粘贴在右侧.则右图像刚好覆盖左图像中的相同部分
-
python+OpenCV实现图像拼接
本文实例为大家分享了利用python和OpenCV实现图像拼接,供大家参考,具体内容如下 python+OpenCV实现image stitching 在最新的OpenCV官方文档中可以找到C++版本的Stitcher类的说明, 但是python版本的还没有及时更新, 本篇对python版本的实现做一个简单的介绍. 由于官方文档中还没有python版本的Stitcher类的说明, 因此只能自己去GitHub源码上找, 以下是stitching的样例: from __future__ import
-
Python+OpenCV实现图像的全景拼接
本文实例为大家分享了Python+OpenCV实现图像的全景拼接的具体代码,供大家参考,具体内容如下 环境:python3.5.2 + openCV3.4 1.算法目的 将两张相同场景的场景图片进行全景拼接. 2.算法步骤 本算法基本步骤有以下几步: 步骤1:将图形先进行桶形矫正 没有进行桶形变换的图片效果可能会像以下这样: 图片越多拼接可能就会越夸张. 本算法是将图片进行桶形矫正.目的就是来缩减透视变换(Homography)之后图片产生的变形,从而使拼接图片变得畸形. 步骤2:特征点匹配 本
-

基于Python和openCV实现图像的全景拼接详细步骤
基本介绍 图像的全景拼接,即"缝合"两张具有重叠区域的图来创建一张全景图.其中用到了计算机视觉和图像处理技术有:关键点检测.局部不变特征.关键点匹配.RANSAC(Random Sample Consensus,随机采样一致性)和透视变形. 具体步骤 (1)检测左右两张图像的SIFT关键特征点,并提取局部不变特征 : (2)使用knnMatch检测来自右图(左图)的SIFT特征,与左图(右图)进行匹配 : (3)计算视角变换矩阵H,用变换矩阵H对右图进行扭曲变换: (4)将左图(右图)
-
python opencv实现图像边缘检测
本文利用python opencv进行图像的边缘检测,一般要经过如下几个步骤: 1.去噪 如cv2.GaussianBlur()等函数: 2.计算图像梯度 图像梯度表达的是各个像素点之间,像素值大小的变化幅度大小,变化较大,则可以认为是出于边缘位置,最多可简化为如下形式: 3.非极大值抑制 在获得梯度的方向和大小之后,应该对整幅图像做一个扫描,去除那些非边界上的点.对每一个像素进行检查,看这个点的梯度是不是周围具有相同梯度方向的点中最大的.如下图所示: 4.滞后阈值 现在要确定那些边界才是真正的
-
Python Opencv实现图像轮廓识别功能
本文实例为大家分享了python opencv识别图像轮廓的具体代码,供大家参考,具体内容如下 要求:用矩形或者圆形框住图片中的云朵(不要求全部框出) 轮廓检测 Opencv-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓. import cv2 img = cv2.imread('cloud.jpg') # 灰度图像 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 二值化 ret, binary = cv2.th
-
python opencv对图像进行旋转且不裁剪图片的实现方法
最近在做深度学习时需要用到图像处理相关的操作,在度娘上找到的图片旋转方法千篇一律,旋转完成的图片都不是原始大小,很苦恼,于是google到歪果仁的网站扒拉了一个方法,亲测好用,再次嫌弃天下文章一大抄的现象,虽然我也是抄歪果仁的. 废话不多说了,直接贴代码了. def rotate_bound(image, angle): # grab the dimensions of the image and then determine the # center (h, w) = image.shape[
-
Python+OpenCV实现图像融合的原理及代码
根据导师作业安排,在学习数字图像处理(刚萨雷斯版)第六章 彩色图像处理 中的彩色模型后,导师安排了一个比较有趣的作业: 融合原理为: 1 注意:遥感原RGB图image和灰度图Grayimage为测试用的输入图像: 2 步骤:(1)将RGB转换为HSV空间(H:色调,S:饱和度,V:明度): (2)用Gray图像诶换掉HSV中的V: (3)替换后的HSV转换回RGB空间即可得到结果. 书上只介绍了HSI彩色模型,并没有说到HSV,所以需要网上查找资料. Python代码如下: import cv
-
Python OpenCV处理图像之滤镜和图像运算
本文实例为大家分享了Python OpenCV处理图像之滤镜和图像运算的具体代码,供大家参考,具体内容如下 0x01. 滤镜 喜欢自拍的人肯定都知道滤镜了,下面代码尝试使用一些简单的滤镜,包括图片的平滑处理.灰度化.二值化等: import cv2.cv as cv image=cv.LoadImage('img/lena.jpg', cv.CV_LOAD_IMAGE_COLOR) #Load the image cv.ShowImage("Original", image) grey
-
python opencv判断图像是否为空的实例
如下所示: import cv2 im = cv2.imread('2.jpg') if im is None: print("图像为空") # cv2.imshow("ss", im) # cv2.waitKey(0) 以上这篇python opencv判断图像是否为空的实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们.
-
python Opencv计算图像相似度过程解析
这篇文章主要介绍了python Opencv计算图像相似度过程解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下 一.相关概念 一般我们人区分谁是谁,给物品分类,都是通过各种特征去辨别的,比如黑长直.大白腿.樱桃唇.瓜子脸.王麻子脸上有麻子,隔壁老王和儿子很像,但是儿子下巴涨了一颗痣和他妈一模一样,让你确定这是你儿子. 还有其他物品.什么桌子带腿.镜子反光能在里面倒影出东西,各种各样的特征,我们通过学习.归纳,自然而然能够很快识别分类出新物品.
-
浅谈python opencv对图像颜色通道进行加减操作溢出
由于opencv读入图片数据类型是uint8类型,直接加减会导致数据溢出现象 (1)用Numpy操作 可以先将图片数据类型转换成int类型进行计算, data=np.array(image,dtype='int') 经过处理后(如:遍历,将大于255的置为255,小于0的置为0) 再将图片还原成uint8类型 data=np.array(image,dtype='uint8') 注意: (1)如果直接相加,那么 当像素值 > 255时,结果为对256取模的结果,例如:(240+66) % 256