C++超详细分析红黑树
目录
- 红黑树
- 红黑树的概念
- 红黑树的性质
- 红黑树结点的定义
- 红黑树的插入操作
- 情况一
- 情况二
- 情况三
- 红黑树的验证
- 用红黑树封装map、set
- 红黑树的迭代器
- 封装map
- 封装set
红黑树
红黑树的概念
红黑树的概念 红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。
红黑树和AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是O(),红黑树不追求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,所以在经常进行增删的结构中性能比AVL树更优,而且红黑树实现比较简单,所以实际运用中红黑树更多。
红黑树的性质
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个结点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该节点到其所有后代叶节点的简单路径上,均包含相同数目的黑色结点
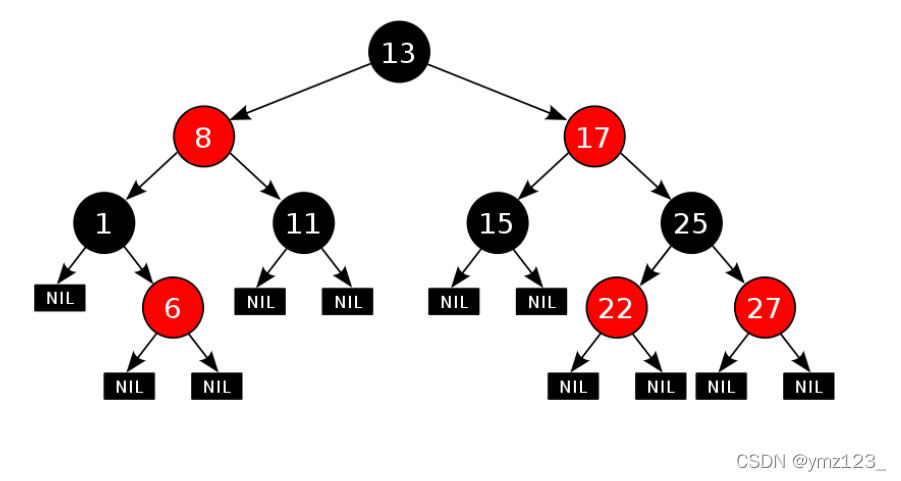
- 每个叶子结点都是黑色的(此处的叶子节点指的是空结点,如上图路径数为11条)
红黑树结点的定义
enum Color {
BLACK,
RED
};
template<class T>
struct RBTreeNode
{
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Color _col;
T _data;
RBTreeNode(const T& data)
: _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
,_data(data)
{}
};
红黑树的插入操作
约定:cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点
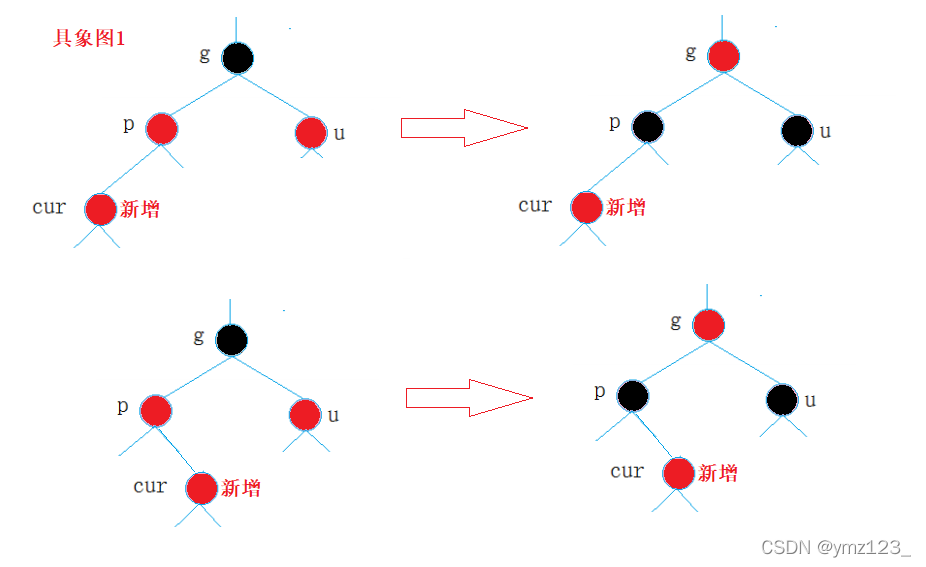
情况一
- 情况一:cur为红,p为红,g为黑,u存在且为红注意:此处看到的树,可能是一棵完整的树,也可能是一棵子树
- 解决方式:将p,u改为黑,g改为红,然后把g当成cur,继续向上调整
如果g是根节点,调整完成后,需要将g改为黑色
如果g是子树,g一定有双亲,且g的双亲如果是红色,需要继续向上调整。


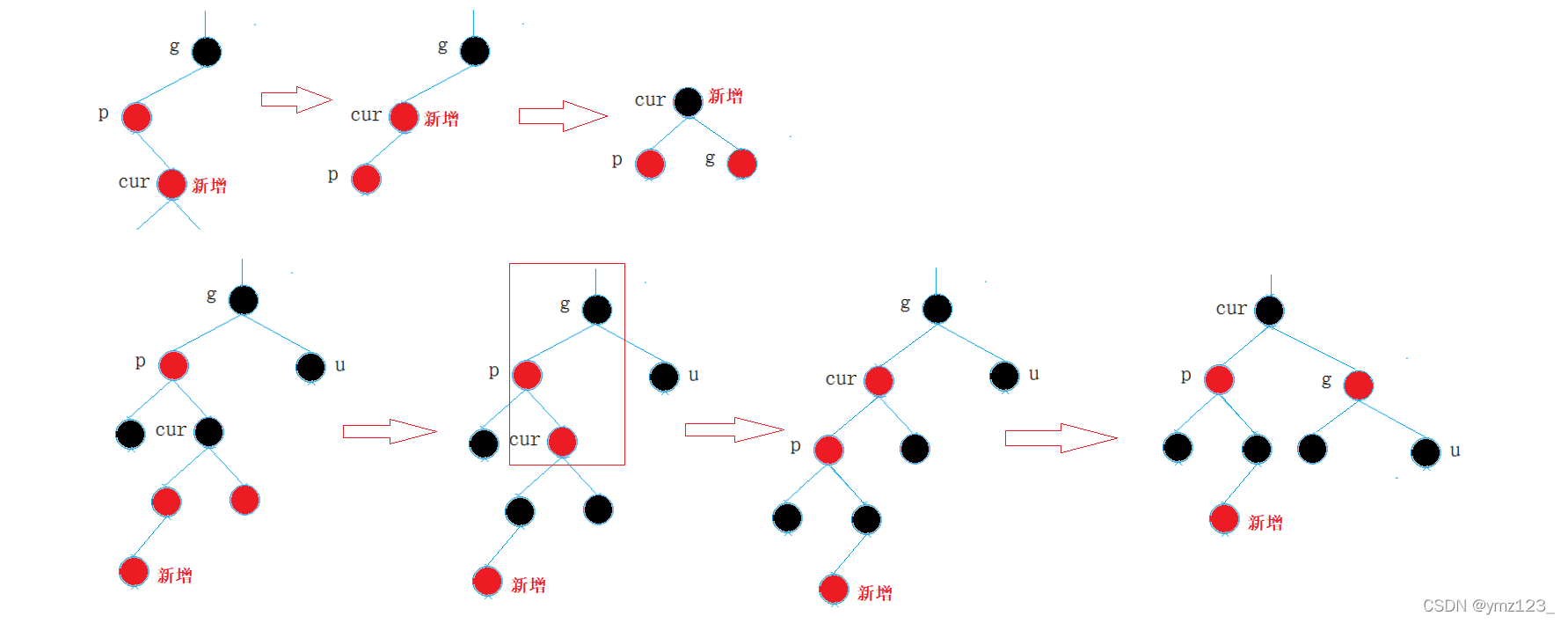
情况二
情况二:cur为红,p为红,g为黑,u不存在/u为黑
解决方法:p为g的左孩子,cur为p的左孩子,则进行右单旋;p为g的右孩子,cur为p的右孩子,则进行左单旋。
p变黑,g变红。
1.如果u节点不存在,则cur一定是新插入节点,因为如果cur不是新插入节点,则cur和p一定有一个节点的颜色是黑色,就不满足性质4:每条路径黑色节点个数相同。
2.如果u节点存在,则其一定是黑色的,cur一定不是新增节点,那么cur节点原来的颜色一定是黑色的,是作为子树的祖父,由第一种情况变化过来的


情况三
情况三:cur为红,p为红,g为黑,u不存在/u为黑(折线型)
p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;
p为g的右孩子,cur为p的左孩子,则针对p做右单旋转。
即转换为了情况二。再对g做对于旋转。即进行双旋转。

// T->K set
// T->pair<const K, V> map
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef RBTreeIterator<T, T&, T*> iterator;
typedef RBTreeIterator<T, const T&, const T*> const_iterator;
iterator begin();
iterator end();
RBTree()
:_root(nullptr)
{}
// 拷贝构造和赋值重载
// 析构
Node* Find(const K& key);
pair<iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return make_pair(iterator(_root), true);
}
Node* parent = nullptr;
Node* cur = _root;
KeyOfT kot;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(iterator(cur), false);
}
}
// 新增节点,颜色是红色,可能破坏规则3,产生连续红色节点
cur = new Node(data);
Node* newnode = cur;
cur->_col = RED;
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
cur->_parent = parent;
}
else
{
parent->_left = cur;
cur->_parent = parent;
}
// 控制近似平衡
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent;
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;
// 情况一:uncle存在且为红,进行变色处理,并继续往上更新处理
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
} // 情况二+三:uncle不存在,或者存在且为黑,需要旋转+变色处理
else
{
// 情况二:单旋+变色
if (cur == parent->_left)
{
RotateR(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else // 情况三:双旋 + 变色
{
RotateL(parent);
RotateR(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
else // (parent == grandfather->_right)
{
Node* uncle = grandfather->_left;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
cur = grandfather;
parent = cur->_parent;
}
else
{
if (parent->_right == cur)
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return make_pair(iterator(newnode), true);
}
void RotateR(Node* parent);
void RotateL(Node* parent);
private:
Node* _root;
};
红黑树的验证
红黑树的检测分为两步:
- 检测其是否满足二叉搜索树(中序遍历是否为有序序列)
- 检测其是否满足红黑树的性质
此处用未改造过的红黑树
template<class K, class V>
struct RBTreeNode
{
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
Colour _col;
pair<K, V> _kv;
RBTreeNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
, _kv(kv)
{}
};
template<class K, class V>
class RBTree
{
typedef RBTreeNode<K, V> Node;
public:
RBTree()
:_root(nullptr)
{}
bool Insert(const pair<K, V>& kv);
void RotateR(Node* parent);
void RotateL(Node* parent);
void _InOrder(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrder(root->_left);
cout << root->_kv.first << " ";
_InOrder(root->_right);
}
void InOrder()
{
_InOrder(_root);
cout<<endl;
}
bool CheckRED_RED(Node* cur)
{
if (cur == nullptr)
{
return true;
}
if (cur->_col == RED && cur->_parent->_col == RED)
{
cout << "违反规则三,存在连续的红色节点" << endl;
return false;
}
return CheckRED_RED(cur->_left)
&& CheckRED_RED(cur->_right);
}
// 检查每条路径黑色节点的数量
bool CheckBlackNum(Node* cur, int blackNum, int benchmark) {
if (cur == nullptr) {
if (blackNum != benchmark){
cout << "违反规则四:黑色节点的数量不相等" << endl;
return false;}
return true;
}
if (cur->_col == BLACK)
++blackNum;
return CheckBlackNum(cur->_left, blackNum, benchmark)
&& CheckBlackNum(cur->_right, blackNum, benchmark);
}
bool IsBalance()
{
if (_root == nullptr)
{
return true;
}
if (_root->_col == RED)
{
cout << "根节点是红色,违反规则二" << endl;
return false;
}
// 算出最左路径的黑色节点的数量作为基准值
int benchmark = 0;
Node* cur = _root;
while (cur)
{
if (cur->_col == BLACK)
{
++benchmark;
}
cur = cur->_left;
}
int blackNum = 0;
return CheckRED_RED(_root) && CheckBlackNum(_root, blackNum, benchmark);
}
private:
Node* _root;
};
void TestRBTree1()
{
const int n = 1000000;
vector<int> a;
a.reserve(n);
srand(time(0));
for (size_t i = 0; i < n; ++i)
{
a.push_back(rand());
}
RBTree<int, int> t1;
for (auto e : a)
{
t1.Insert(make_pair(e, e));
}
cout << t1.IsBalance() << endl;
//t1.InOrder();
}
用红黑树封装map、set
红黑树的迭代器
begin()与end()
begin()可以放在红黑树中最小节点(即最左侧节点)的位置
end()放在最大节点(最右侧节点)的下一个位置
typedef RBTreeIterator<T, T&, T*> iterator;
typedef RBTreeIterator<T, const T&, const T*> const_iterator;
iterator begin()
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
//return left
return iterator(left);
}
iterator end()
{
return iterator(nullptr);
}
操作符重载
template<class T, class Ref, class Ptr>
struct RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
RBTreeIterator(Node* node = nullptr)
:_node(node)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
Self& operator--()
{
// 跟++基本是反过来
return *this;
}
Self& operator++()
{
if (_node->_right)
{
// 右子树中序第一个节点,也就是右子树的最左节点
Node* subLeft = _node->_right;
while (subLeft->_left)
{
subLeft = subLeft->_left;
}
_node = subLeft;
}
else
{
// 当前子树已经访问完了,要去找祖先访问,沿着到根节点的路径往上走,
// 找孩子是父亲左的那个父亲节点
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && parent->_right == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
};
封装map
#pragma once
#include "RBTree.h"
namespace MyMap
{
template < class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
pair<iterator, bool> insert(const pair<const K, V>& kv)
{
return _t.Insert(kv);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = _t.Insert(make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
};
void test_map()
{
map<string, string> dict;
dict.insert(make_pair("sort", "排序"));
dict.insert(make_pair("string", "字符串"));
dict.insert(make_pair("debug", "找虫子"));
dict.insert(make_pair("set", "集合"));
map<string, string>::iterator it = dict.begin();
while (it != dict.end())
{
cout << it->first << ":" << it->second << endl;
++it;
}
cout << endl;
}
}
封装set
#pragma once
#include "RBTree.h"
namespace MySet
{
template < class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
typedef typename RBTree<K, K, SetKeyOfT>::iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
pair<iterator, bool> insert(const K& key)
{
return _t.Insert(key);
}
private:
RBTree<K, K, SetKeyOfT> _t;
};
void test_set()
{
set<int> s;
s.insert(1);
s.insert(3);
s.insert(7);
s.insert(2);
s.insert(12);
s.insert(22);
s.insert(2);
s.insert(23);
s.insert(-2);
s.insert(-9);
s.insert(30);
set<int>::iterator it = s.begin();
while (it != s.end())
{
cout << *it << " ";
++it;
}
cout << endl;
for (auto e : s)
{
cout << e << " ";
}
cout << endl;
}
}
到此这篇关于C++超详细分析红黑树的文章就介绍到这了,更多相关C++ 红黑树内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
C++数据结构红黑树全面分析
目录 概念和性质 红黑树的实现
-

C++ STL容器详解之红黑树部分模拟实现
目录 一.红黑树的概念 二.红黑树的性质 三.红黑树节点的定义 四.红黑树结构 五. 红黑树的插入操作 六.代码 总结 一.红黑树的概念 红黑树(Red Black Tree),是在计算机科学中用到的一种数据结构,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black. 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的. 二.红黑树的性质 1. 每个结点不是红色就是黑色: 2. 根节点是黑色的:
-
C++实现红黑树应用实例代码
红黑树的应用: 1.利用key_value对,快速查找,O(logn) socket与客户端id之间,形成映射关系(socket, id) 内存分配管理 一整块内存,不断分配小块 每分配一次,就加入到红黑树 释放的时候,在红黑树找到相应的块,然后去释放 2.利用红黑树中序遍历是顺序的特性 进程的调度 进程处于等待状态,每个进程都有等待的时间,在未来某个时刻会运行,将这些进程利用红黑树组织起来 在某个时刻,找到对应时刻的节点,然后中序遍历,就可以把该节点之前的节点全部运行到. 3.nginx定时器
-
C++超详细分析红黑树
目录 红黑树 红黑树的概念 红黑树的性质 红黑树结点的定义 红黑树的插入操作 情况一 情况二 情况三 红黑树的验证 用红黑树封装map.set 红黑树的迭代器 封装map 封装set 红黑树 红黑树的概念 红黑树的概念 红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black. 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的. 红黑树和AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是
-
Java数据结构超详细分析二叉搜索树
目录 1.搜索树的概念 2.二叉搜索树的简单实现 2.1查找 2.2插入 2.3删除 2.4修改 3.二叉搜索树的性能 1.搜索树的概念 二叉搜索树是一种特殊的二叉树,又称二叉查找树,二叉排序树,它有几个特点: 如果左子树存在,则左子树每个结点的值均小于根结点的值. 如果右子树存在,则右子树每个结点的值均大于根结点的值. 中序遍历二叉搜索树,得到的序列是依次递增的. 二叉搜索树的左右子树均为二叉搜索树. 二叉搜索树的结点的值不能发生重复. 2.二叉搜索树的简单实现 我们来简单实现以下搜索树,就不
-
Java超详细分析泛型与通配符
目录 1.泛型 1.1泛型的用法 1.1.1泛型的概念 1.1.2泛型类 1.1.3类型推导 1.2裸类型 1.3擦除机制 1.3.1关于泛型数组 1.3.2泛型的编译与擦除 1.4泛型的上界 1.4.1泛型的上界 1.4.2特殊的泛型上界 1.4.3泛型方法 1.4.4类型推导 2.通配符 2.1通配符的概念 2.2通配符的上界 2.3通配符的下界 题外话: 泛型与通配符是Java语法中比较难懂的两个语法,学习泛型和通配符的主要目的是能够看懂源码,实际使用的不多. 1.泛型 1.1泛型的用法
-
非常适合新手学生的Java线程池超详细分析
目录 线程池的好处 创建线程池的五种方式 缓存线程池CachedThreadPool 固定容量线程池FixedThreadPool 单个线程池SingleThreadExecutor 定时任务线程池ScheduledThreadPool ThreadPoolExecutor创建线程池(十分推荐) ThreadPoolExecutor的七个参数详解 workQueue handler 如何触发拒绝策略和线程池扩容? 线程池的好处 可以实现线程的复用,避免重新创建线程和销毁线程.创建线程和销毁线程对
-
C++ 超详细分析数据结构中的时间复杂度
别别着急划走哈,如果你跟我一样是大学生,那么你发现了一个宝藏!我们往后看--> 要想了解时间复杂度和空间复杂度,我们得知道什么是时间复杂度和空间复杂度! 有的人看到这就明白了,而有的人却去追求它的内涵: 见名知意嘛,时间复杂度不就是表示一个算法运行完所需要的时间?这还用问?错错错! 我来举一个很简单的例子:你家隔壁老王买了一台 i9 12900k 和 RTX3080Ti 整个64GB的内存,你眼瞅着你 4G的内存,洋垃圾的处理器,打开个PS都要冒烟的那种,来来来,你跟我说说能比吗? 所以简单来说
-
Java 栈与队列超详细分析讲解
目录 一.栈(Stack) 1.什么是栈? 2.栈的常见方法 3.自己实现一个栈(底层用一个数组实现) 二.队列(Queue) 1.什么是队列? 2.队列的常见方法 3.队列的实现(单链表实现) 4.循环队列 一.栈(Stack) 1.什么是栈? 栈其实就是一种数据结构 - 先进后出(先入栈的数据后出来,最先入栈的数据会被压入栈底) 什么是java虚拟机栈? java虚拟机栈只是JVM当中的一块内存,该内存一般用来存放 例如:局部变量当调用函数时,我们会为函数开辟一块内存,叫做 栈帧,在 jav
-
C++ 超详细分析多态的原理与实现
目录 多态的定义及实现 多态的构成条件 虚函数重写 C++11的override和final 抽象类 多态的原理 虚函数表 动态绑定与静态绑定 单继承和多继承关系的虚函数表 单继承中的虚函数表 多继承中的虚函数表 常见问题 多态的定义及实现 多态的概念:通俗来说,就是多种形态,具体点就是去完成某个行为,当不同的对象去完成时会产生出不同的状态. 比如买票这个行为,当普通人买票时,是全价买票:学生买票时,是半价买票:军人买票时是优先买票. 多态的构成条件 多态是在不同继承关系的类对象,去调用同一函数
-
C++ 超详细分析数据结构中的时间复杂度
目录 什么是时间复杂度和空间复杂度 如何计算时间复杂度和空间复杂度 如何计算时间复杂度和空间复杂度 别别着急划走哈,如果你跟我一样是大学生,那么你发现了一个宝藏!我们往后看--> 什么是时间复杂度和空间复杂度 要想了解时间复杂度和空间复杂度,我们得知道什么是时间复杂度和空间复杂度! 有的人看到这就明白了,而有的人却去追求它的内涵: 见名知意嘛,时间复杂度不就是表示一个算法运行完所需要的时间?这还用问?错错错! 我来举一个很简单的例子:你家隔壁老王买了一台 i9 12900k 和 RTX3080T
-
超详细分析C语言动态内存管理问题
目录 一.为什么存在动态内存的分配 二.动态内存函数的介绍 2.1 malloc和free 2.2 calloc 2.3 realloc 三.常见的动态内存错误 3.1 对NULL指针的解引用操作 3.2 对动态开辟空间的越界访问 3.3 对非动态开辟内存使用free释放 3.4 对同一块动态内存多次释放 3.5 动态开辟内存忘记释放(内存泄漏) 四.几个经典的笔试题 五.C/C++程序的内存开辟 六.柔性数组 6.1 柔性数组的特点 6.2 柔性数组的使用 6.3 柔性数组的优势 上期结束了[
-
Java超详细分析抽象类和接口的使用
目录 什么是抽象类 抽象类语法 总结抽象类: 接口 怎么定义接口 接口间的继承 几个重要的接口 接口comparable comparator接口-比较器 cloneable接口深入理解深拷贝与浅拷贝 怎么使用cloneable接口 浅拷贝: 深拷贝 什么是抽象类 什么是抽象类呢?抽象类顾名思义就是很抽象,就是当我们没有足够的信息去描述这个类的时候我们就可以先不用描述,这样的类就是抽象类. 用代码举个例子: class Shape { public void draw() { System.ou