OpenCV 表盘指针自动读数的示例代码
前段时间参加了一个表盘指针读数的比赛,今天来总结一下
数据集一共有一千张图片:

方法一:径向灰度求和
基本原理:
将图像以表盘圆心转换成极坐标,然后通过矩阵按行求和找到二值图最大值即为指针尖端
导入需要用到的包
import cv2 as cv import numpy as np import math from matplotlib import pyplot as plt import os
图像预处理
去除背景:利用提取红色实现
def extract_red(image): """ 通过红色过滤提取出指针 """ red_lower1 = np.array([0, 43, 46]) red_upper1 = np.array([10, 255, 255]) red_lower2 = np.array([156, 43, 46]) red_upper2 = np.array([180, 255, 255]) dst = cv.cvtColor(image, cv.COLOR_BGR2HSV) mask1 = cv.inRange(dst, lowerb=red_lower1, upperb=red_upper1) mask2 = cv.inRange(dst, lowerb=red_lower2, upperb=red_upper2) mask = cv.add(mask1, mask2) return mask
获得钟表中心:轮廓查找,取出轮廓的外接矩形,根据矩形面积找出圆心
def get_center(image):
"""
获取钟表中心
"""
edg_output = cv.Canny(image, 100, 150, 2) # canny算子提取边缘
cv.imshow('dsd', edg_output)
# 获取图片轮廓
contours, hireachy = cv.findContours(edg_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
center = []
cut=[0, 0]
for i, contour in enumerate(contours):
x, y, w, h = cv.boundingRect(contour) # 外接矩形
area = w * h # 面积
if area < 100 or area > 4000:
continue
cv.rectangle(image, (x, y), (x + w, y + h), (255, 0, 0), 1)
cx = w / 2
cy = h / 2
cv.circle(image, (np.int(x + cx), np.int(y + cy)), 1, (255, 0, 0)) ## 在图上标出圆心
center = [np.int(x + cx), np.int(y + cy)]
break
return center[::-1]

由上面的图像可以看出,圆心定位还是非常准确的
图片裁剪
def ChangeImage(image): """ 图像裁剪 """ # 指针提取 mask = extract_red(image) mask = cv.medianBlur(mask,ksize=5)#去噪 # 获取中心 center = get_center(mask) # 去除多余黑色边框 [y, x] = center cut = mask[y-300:y+300, x-300:x+300] # 因为mask处理后已经是二值图像,故不用转化为灰度图像 return cut
剪裁后的图像如下图所示:

极坐标转换
注意:需要将图片裁剪成正方形
def polar(image):
"""
转换成极坐标
"""
x, y = 300, 300
maxRadius = 300*math.sqrt(2)
linear_polar = cv.linearPolar(image, (y, x), maxRadius, cv.WARP_FILL_OUTLIERS + cv.INTER_LINEAR)
mypolar = linear_polar.copy()
#将图片调整为从0度开始
mypolar[:150, :] = linear_polar[450:, :]
mypolar[150:, :] = linear_polar[:450, :]
cv.imshow("linear_polar", linear_polar)
cv.imshow("mypolar", mypolar)
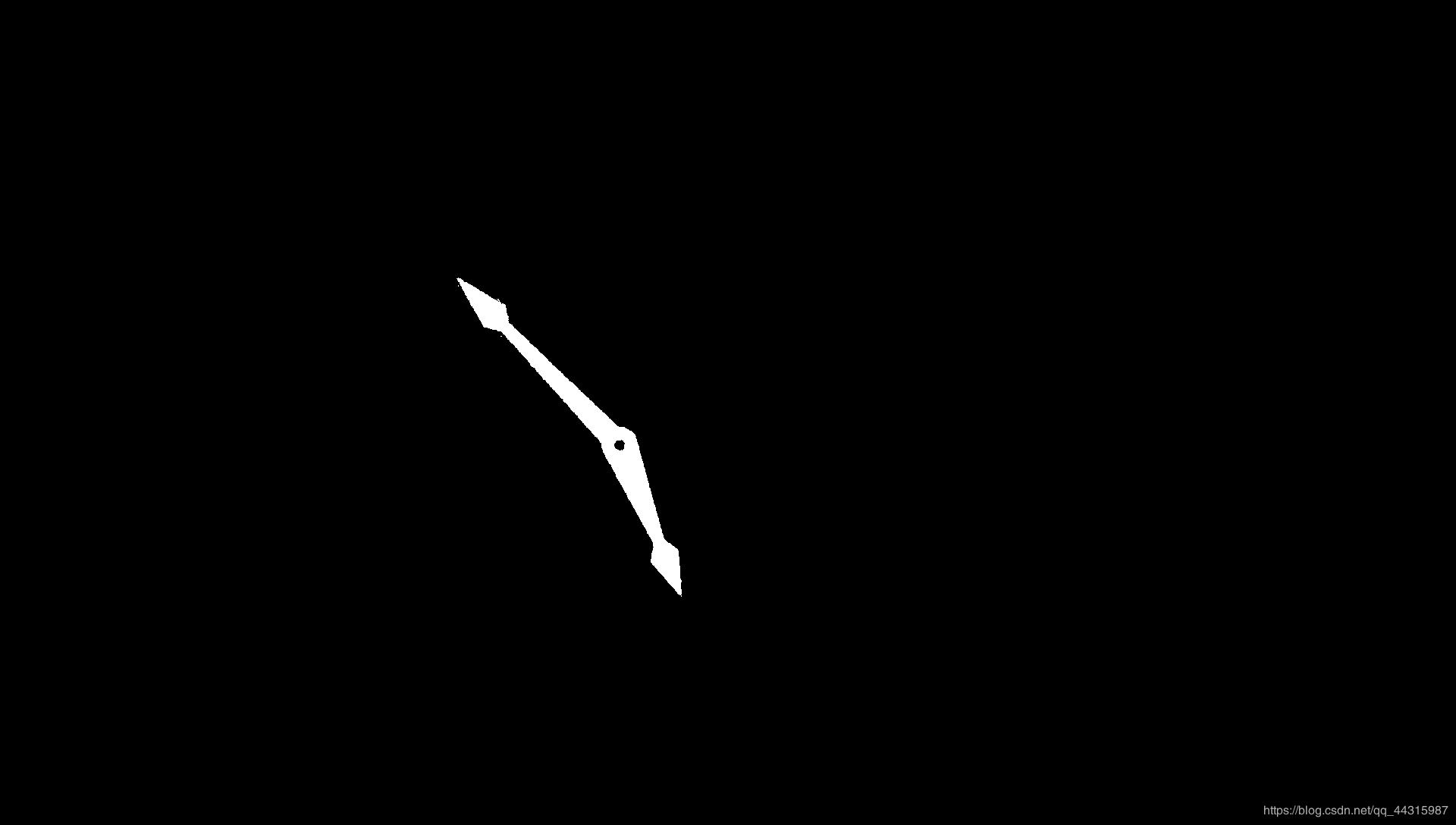
return mypolar

由图像就可以很容易发现指针的顶点
计算角度
def Get_Reading(sumdata):
"""
读数并输出
"""
peak = []
# s记录遍历时波是否在上升
s = sumdata[0] < sumdata[1]
for i in range(599):
# 上升阶段
if s==True and sumdata[i] > sumdata[i+1] and sumdata[i] > 70000:
peak.append(sumdata[i])
s=False
# 下降阶段
if s==False and sumdata[i] < sumdata[i+1]:
s=True
peak.sort()
a = sumdata[0]
b = sumdata[-1]
if not peak or max(a,b) > peak[-1]:
peak.append(max(a,b))
longindex = (sumdata.index(peak[-1]))%599
longnum = (longindex + 1)//25*50
# 先初始化和长的同一刻度
#shortindex = longindex
shortnum = round(longindex / 6)
try:
shortindex = sumdata.index(peak[-2])
shortnum = round(shortindex / 6)
except IndexError:
i=0
while i<300:
i += 1
l = sumdata[(longindex-i)%600]
r = sumdata[(longindex+i)%600]
possibleshort = max(l,r)
# 在短指针可能范围内寻找插值符合条件的值
if possibleshort > 80000:
continue
elif possibleshort < 60000:
break
else:
if abs(l-r) > 17800:
shortindex = sumdata.index(possibleshort) - 1
shortnum = round(shortindex / 6)
break
return [longnum,shortnum%100]
def test():
"""
RGS法测试
"""
image = cv.imread("./BONC/1_{0:0>4d}".format(400) + ".jpg")
newimg = ChangeImage(image)
polarimg = polar(newimg)
psum = polarimg.sum(axis=1, dtype = 'int32')
result = Get_Reading(list(psum))
print(result)
if __name__ == "__main__":
test()
k = cv.waitKey(0)
if k == 27:
cv.destroyAllWindows()
elif k == ord('s'):
cv.imwrite('new.jpg', src)
cv.destroyAllWindows()
[1050, 44]
方法二:Hough直线检测
原理:利用Hough变换检测出指针的两条边,从而两条边的中线角度即为指针刻度
数据预处理与上面的方法类似

可以看到分别检测出了两个指针的左右两条边,然后可以由这四个角度算出两个指针中线的角度,具体计算过程写的有点复杂
class Apparatus:
def __init__(self, name):
self.name = name
self.angle = []
self.src = cv.imread(name)
def line_detect_possible_demo(self, image, center, tg):
'''
:param image: 二值图
:param center: 圆心
:param tg: 直线检测maxLineGap
'''
res = {} # 存放线段的斜率和信息
edges = cv.Canny(image, 50, 150, apertureSize=7)
cv.imshow("abcdefg", edges)
lines = cv.HoughLinesP(edges, 1, np.pi/360, 13, minLineLength=20, maxLineGap=tg)
for line in lines:
x_1, y_1, x_2, y_2 = line[0]
# 将坐标原点移动到圆心
x1 = x_1 - center[0]
y1 = center[1] - y_1
x2 = x_2 - center[0]
y2 = center[1] - y_2
# 计算斜率
if x2 - x1 == 0:
k = float('inf')
else:
k = (y2-y1)/(x2-x1)
d1 = np.sqrt(max(abs(x2), abs(x1)) ** 2 + (max(abs(y2), abs(y1))) ** 2) # 线段长度
d2 = np.sqrt(min(abs(x2), abs(x1)) ** 2 + (min(abs(y2), abs(y1))) ** 2)
# 将长指针与短指针做标记
if d1 < 155 and d1 > 148 and d2 > 115:
res[k] = [1]
elif d1 < 110 and d1 > 100 and d2 > 75:
res[k] = [2]
else:
continue
res[k].append(1) if (x2 + x1) /2 > 0 else res[k].append(0) # 将14象限与23象限分离
cv.line(self.src, (x1 + center[0], center[1] - y1), (x2 + center[0], center[1] - y2), (255, 0, 0), 1)
cv.imshow("line_detect-posssible_demo", self.src)
# 计算线段中点的梯度来判断是指针的左侧线段还是右侧线段
middle_x = int((x_1 + x_2) / 2)
middle_y = int((y_1 + y_2) / 2)
grad_mat = image[middle_y-5:middle_y+6, middle_x-5:middle_x+6]
cv.imshow("grad_mat", grad_mat)
grad_x = cv.Sobel(grad_mat, cv.CV_32F, 1, 0)
grad_y = cv.Sobel(grad_mat, cv.CV_32F, 0, 1)
gradx = np.max(grad_x) if np.max(grad_x) != 0 else np.min(grad_x)
grady = np.max(grad_y) if np.max(grad_y) != 0 else np.min(grad_y)
if ((gradx >=0 and grady >= 0) or (gradx <= 0 and grady >= 0)) and res[k][1] == 1:
res[k].append(1) # 右测
elif ((gradx <= 0 and grady <= 0) or (gradx >= 0 and grady <= 0)) and res[k][1] == 0:
res[k].append(1)
else:
res[k].append(0) # 左侧
# 计算角度
angle1 = [i for i in res if res[i][0] == 1]
angle2 = [i for i in res if res[i][0] == 2]
# 长指针
a = np.arctan(angle1[0])
b = np.arctan(angle1[1])
if a * b < 0 and max(abs(a), abs(b)) > np.pi / 4:
if a + b < 0:
self.angle.append(math.degrees(-(a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append(
math.degrees(-(a + b) / 2) + 180)
else:
self.angle.append(math.degrees(np.pi - (a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append(
math.degrees(np.pi - (a + b) / 2) + 180)
else:
self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2)) if res[angle1[1]][1] == 1 else self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2) + 180)
print('长指针读数:%f' % self.angle[0])
# 短指针
a = np.arctan(angle2[0])
b = np.arctan(angle2[1])
if a * b < 0 and max(abs(a), abs(b)) > np.pi / 4:
if a + b < 0:
self.angle.append(math.degrees(-(a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append(
math.degrees(-(a + b) / 2) + 180)
else:
self.angle.append(math.degrees(np.pi - (a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append(
math.degrees(np.pi - (a + b) / 2) + 180)
else:
self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2)) if res[angle2[1]][1] == 1 else self.angle.append(math.degrees(np.pi / 2 - (a + b) / 2) + 180)
print('短指针读数:%f' % self.angle[1])
def get_center(self, mask):
edg_output = cv.Canny(mask, 66, 150, 2)
cv.imshow('edg', edg_output)
# 外接矩形
contours, hireachy = cv.findContours(edg_output, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
center = []
for i, contour in enumerate(contours):
x, y, w, h = cv.boundingRect(contour) # 外接矩形
area = w * h # 面积
if area > 1000 or area < 40:
continue
#print(area)
# cv.circle(src, (np.int(cx), np.int(cy)), 3, (255), -1)
cv.rectangle(self.src, (x, y), (x + w, y + h), (255, 0, 0), 1)
cx = w / 2
cy = h / 2
cv.circle(self.src, (np.int(x + cx), np.int(y + cy)), 1, (255, 0, 0))
center.extend([np.int(x + cx), np.int(y + cy)])
break
cv.imshow('center', self.src)
return center
def extract(self, image):
red_lower1 = np.array([0, 43, 46])
red_lower2 = np.array([156, 43, 46])
red_upper1 = np.array([10, 255, 255])
red_upper2 = np.array([180, 255, 255])
frame = cv.cvtColor(image, cv.COLOR_BGR2HSV)
mask1 = cv.inRange(frame, lowerb=red_lower1, upperb=red_upper1)
mask2 = cv.inRange(frame, lowerb=red_lower2, upperb=red_upper2)
mask = cv.add(mask1, mask2)
mask = cv.bitwise_not(mask)
cv.imshow('mask', mask)
return mask
def test(self):
self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation
mask = self.extract(self.src)
mask = cv.medianBlur(mask, ksize=5) # 去噪
# 获取中心
center = self.get_center(mask)
# 去除多余黑色边框
[y, x] = center
mask = mask[x - 155:x + 155, y - 155:y + 155]
cv.imshow('mask', mask)
#self.find_short(center, mask)
try:
self.line_detect_possible_demo(mask, center, 20)
except IndexError:
try:
self.src = cv.imread(self.name)
self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation
self.src = cv.convertScaleAbs(self.src, alpha=1.4, beta=0)
blur = cv.pyrMeanShiftFiltering(self.src, 10, 17)
mask = self.extract(blur)
self.line_detect_possible_demo(mask, center, 20)
except IndexError:
self.src = cv.imread(self.name)
self.src = cv.resize(self.src, dsize=None, fx=0.5, fy=0.5) # 此处可以修改插值方式interpolation
self.src = cv.normalize(self.src, dst=None, alpha=200, beta=10, norm_type=cv.NORM_MINMAX)
blur = cv.pyrMeanShiftFiltering(self.src, 10, 17)
mask = self.extract(blur)
self.line_detect_possible_demo(mask, center, 20)
if __name__ == '__main__':
apparatus = Apparatus('./BONC/1_0555.jpg')
# 读取图片
apparatus.test()
k = cv.waitKey(0)
if k == 27:
cv.destroyAllWindows()
elif k == ord('s'):
cv.imwrite('new.jpg', apparatus.src)
cv.destroyAllWindows()
长指针读数:77.070291
短指针读数:218.896747
由结果可以看出精确度还是挺高的,但是这种方法有三个缺点:
- 当两个指针重合时候不太好处理
- 有时候hough直线检测只能检测出箭头的一条边,这时候就会报错,可以利用图像增强、角点检测和图像梯度来辅助解决,但是效果都不太好
- 计算角度很复杂!!(也可能是我想复杂了,不过这段代码确实花了大量时间)
代码里可能还有很多问题,希望大家多多指出
到此这篇关于OpenCV 表盘指针自动读数的示例代码的文章就介绍到这了,更多相关OpenCV 表盘自动读数内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

python-opencv在有噪音的情况下提取图像的轮廓实例
对于一般的图像提取轮廓,介绍了一个很好的方法,但是对于有噪声的图像,并不能很好地捕获到目标物体. 比如对于我的鼠标,提取的轮廓效果并不好,因为噪声很多: 所以本文增加了去掉噪声的部分. 首先加载原始图像,并显示图像 img = cv2.imread("temp.jpg") #载入图像 h, w = img.shape[:2] #获取图像的高和宽 cv2.imshow("Origin", img) 然后进行低通滤波处理,进行降噪 blured = cv2.blur(i
-
python+opencv实现动态物体识别
注意:这种方法十分受光线变化影响 自己在家拿着手机瞎晃的成果图: 源代码: # -*- coding: utf-8 -*- """ Created on Wed Sep 27 15:47:54 2017 @author: tina """ import cv2 import numpy as np camera = cv2.VideoCapture(0) # 参数0表示第一个摄像头 # 判断视频是否打开 if (camera.isOpened()
-
python opencv检测目标颜色的实例讲解
实例如下所示: # -*- coding:utf-8 -*- __author__ = 'kingking' __version__ = '1.0' __date__ = '14/07/2017' import cv2 import numpy as np import time if __name__ == '__main__': Img = cv2.imread('example.png')#读入一幅图像 kernel_2 = np.ones((2,2),np.uint8)#2x2的卷积核
-
Python3.7中安装openCV库的方法
1.首先自己直接在cmd中输入 pip3 install openCV是不可行的,即需要自己下载安装包本地安装 2.openCV库 下载地址http://www.lfd.uci.edu/~gohlke/pythonlibs/#opencv 3.opencv_python‑3.4.2‑cp37‑cp37m‑win_amd64.whl(cp37指的是python的版本,win_amd64是指python是64位的,也有可能有人64位的系统装了32位的python,这时候就需要装win32的版本) 4
-
基于OpenCV的PHP图像人脸识别技术
openCV是一个开源的用C/C++开发的计算机图形图像库,非常强大,研究资料很齐全.本文重点是介绍如何使用php来调用其中的局部的功能.人脸侦查技术只是openCV一个应用分支. 1.安装 从源代码编译成一个动态的so文件. 1.1.安装 OpenCV (OpenCV 1.0.0) 下载地址:http://sourceforge.net/project/showfiles.php?group_id=22870&package_id=16948 #tar xvzf OpenCV-1.0.0.ta
-
opencv python 图像去噪的实现方法
在早先的章节里,我们看到很多图像平滑技术如高斯模糊,Median模糊等,它们在移除数量小的噪音时在某种程度上比较好用.在这些技术里,我们取像素周围的一小部分邻居,做一些类似于高斯平均权重,中值等替换掉中间的元素.简单说,移除一个像素的噪音是基于本地邻居的. 噪音有一个属性,噪音一般被认为是具有零平均值的随机变量.假设一个像素噪音,p = p0 + n, 其中p0是像素的真实值,n是那个像素的噪音.你可以从不同图像取大量的同一个像素(N)并计算他们的平均值,理想情况下,你应该得到p=p0,因为均值
-
Python通过OpenCV的findContours获取轮廓并切割实例
1 获取轮廓 OpenCV2获取轮廓主要是用cv2.findContours import numpy as np import cv2 im = cv2.imread('test.jpg') imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours, hierarchy = cv2.findContours(thresh,cv2.RETR_T
-
opencv 做人脸识别 opencv 人脸匹配分析
机器学习 机器学习的目的是把数据转换成信息. 机器学习通过从数据里提取规则或模式来把数据转成信息. 人脸识别 人脸识别通过级联分类器对特征的分级筛选来确定是否是人脸. 每个节点的正确识别率很高,但正确拒绝率很低. 任一节点判断没有人脸特征则结束运算,宣布不是人脸. 全部节点通过,则宣布是人脸. 工业上,常用人脸识别技术来识别物体. 对图片进行识别 复制代码 代码如下: #include "opencv2/core/core.hpp" #include "opencv2/obj
-
Python+Opencv识别两张相似图片
在网上看到python做图像识别的相关文章后,真心感觉python的功能实在太强大,因此将这些文章总结一下,建立一下自己的知识体系. 当然了,图像识别这个话题作为计算机科学的一个分支,不可能就在本文简单几句就说清,所以本文只作基本算法的科普向. 看到一篇博客是介绍这个,但他用的是PIL中的Image实现的,感觉比较麻烦,于是利用Opencv库进行了更简洁化的实现. 相关背景 要识别两张相似图像,我们从感性上来谈是怎么样的一个过程?首先我们会区分这两张相片的类型,例如是风景照,还是人物照.风景照中
-
OpenCV 表盘指针自动读数的示例代码
前段时间参加了一个表盘指针读数的比赛,今天来总结一下 数据集一共有一千张图片: 方法一:径向灰度求和 基本原理: 将图像以表盘圆心转换成极坐标,然后通过矩阵按行求和找到二值图最大值即为指针尖端 导入需要用到的包 import cv2 as cv import numpy as np import math from matplotlib import pyplot as plt import os 图像预处理 去除背景:利用提取红色实现 def extract_red(image): "&quo
-
Python+OpenCV实现分水岭分割算法的示例代码
目录 前言 1.使用分水岭算法进行分割 2.Watershed与random walker分割对比 前言 分水岭算法是用于分割的经典算法,在提取图像中粘连或重叠的对象时特别有用,例如下图中的硬币. 使用传统的图像处理方法,如阈值和轮廓检测,我们将无法从图像中提取每一个硬币,但通过利用分水岭算法,我们能够检测和提取每一个硬币. 在使用分水岭算法时,我们必须从用户定义的标记开始.这些标记可以通过点击手动定义,或者我们可以使用阈值和/或形态学操作等方法自动或启发式定义它们. 基于这些标记,分水岭算法将
-
python使用OpenCV模块实现图像的融合示例代码
可以通过OpenCV函数cv.add()或简单地通过numpy操作添加两个图像,res = img1 + img2.两个图像应该具有相同的深度和类型,或者第二个图像可以是标量值. 三种融合 注意融合时,一般来说两个图像的尺寸是一样大小的,如果大小不一样,需要把大的图像的某一部分先截出来,与小的图先融合,再作为整体替换掉原来大图中抠出的小图部分. """ # @Time : 2020/4/3 # @Author : JMChen """ impor
-
用opencv给图片换背景色的示例代码
图像平滑 模糊/平滑图片来消除图片噪声 OpenCV函数:cv2.blur(), cv2.GaussianBlur(), cv2.medianBlur(), cv2.bilateralFilter() 2D 卷积 OpenCV中用cv2.filter2D()实现卷积操作,比如我们的核是下面这样(3×3区域像素的和除以10): img = cv2.imread('lena.jpg') # 定义卷积核 kernel = np.ones((3, 3), np.float32) / 10 # 卷积操作,
-
Python 利用OpenCV给照片换底色的示例代码
OpenCV的全称是:Open Source Computer Vision Library.OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux.Windows和Mac OS操作系统上.它轻量级而且高效--由一系列 C 函数和少量 C++ 类构成,同时提供了Python.Ruby.MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法.相比于PIL库来说OpenCV更加强大, 可以做更多更复杂的应用,比如人脸识别等. 1. 读入并显示图片 im
-
Python Opencv实现单目标检测的示例代码
一 简介 目标检测即为在图像中找到自己感兴趣的部分,将其分割出来进行下一步操作,可避免背景的干扰.以下介绍几种基于opencv的单目标检测算法,算法总体思想先尽量将目标区域的像素值全置为1,背景区域全置为0,然后通过其它方法找到目标的外接矩形并分割,在此选择一张前景和背景相差较大的图片作为示例. 环境:python3.7 opencv4.4.0 二 背景前景分离 1 灰度+二值+形态学 轮廓特征和联通组件 根据图像前景和背景的差异进行二值化,例如有明显颜色差异的转换到HSV色彩空间进行分割. 1
-
SpringBoot整合screw实现数据库文档自动生成的示例代码
有时候数据库文档需要整理,可是只能手动的复制粘贴,心中一万只草泥马奔腾而过... screw 简洁好用的数据库表结构文档生成工具. 1. 创建项目 1.1 pom.xml <dependency> <groupId>mysql</groupId> <artifactId>mysql-connector-java</artifactId> <scope>runtime</scope> </dependency>
-
用python-webdriver实现自动填表的示例代码
在日常工作中常常需要重复填写某些表单,如果人工完成,费时费力,而且网络延迟令人十分崩溃.如果能够用程序实现自动填表,效率可以提高一倍以上,并且能够移植到多台计算机,进一步提高工作效率.webdriver是python的selenium库中的一个自动化测试工具,它能完全模拟浏览器的操作,无需处理复杂的request.post,对爬虫初学者十分友好. 一.环境配置 python3.6+selenium库+xlrd库+xlwt库 其中xlrd和xlwt库用于读写excel表中的数据. 还要下载一个浏览
-
python+selenium小米商城红米K40手机自动抢购的示例代码
使用环境 1.python3 2.selenium selenium使用简述 1.安装selenium pip install selenium 2.安装ChromeDriver 下载地址:http://chromedriver.storage.googleapis.com/index.html 注意:下载的ChromeDriver需要与Chrome版本一致. 1)Chrome版本查看: 2)ChromeDriver对应版本下载: 3)ChromeDriver下载后解压到任意文件夹,建议可以放到
-
利用Selenium添加cookie实现自动登录的示例代码(fofa)
介绍 Selenium可以模拟浏览器进行自动化操作,但一些网站需要进行登录才能进行一些操作,比起输入账号密码,cookie是更加方便的.而且fofa首先登录邮箱账号时获得的cookie并不是fofa的cookie,因此我们直接选择利用fofa的cookie进行自动登录.但是selenium需要先打开一个网站才会加载进去cookies,因此我们需要将cookies写在代码中,加载进去 扩展 get_cookies(): 获得所有cookie信息. get_cookie(name): 返回字典的ke