matlab鸟群算法求解车间调度问题详解及实现源码
目录
- 一、车间调度简介
- 1 车间调度定义
- 2 传统作业车间调度
- 3 柔性作业车间调度
- 二、蝴蝶优化算法(MBO)简介
- 1 介绍
- 2 香味
- 3 具体算法
- 三、部分源代码
- 五、matlab版本及参考文献
一、车间调度简介
1 车间调度定义
车间调度是指根据产品制造的合理需求分配加工车间顺序,从而达到合理利用产品制造资源、提高企业经济效益的目的。车间调度问题从数学上可以描述为有n个待加工的零件要在m台机器上加工。问题需要满足的条件包括每个零件的各道工序使用每台机器不多于1次,每个零件都按照一定的顺序进行加工。
2 传统作业车间调度
传统作业车间带调度实例
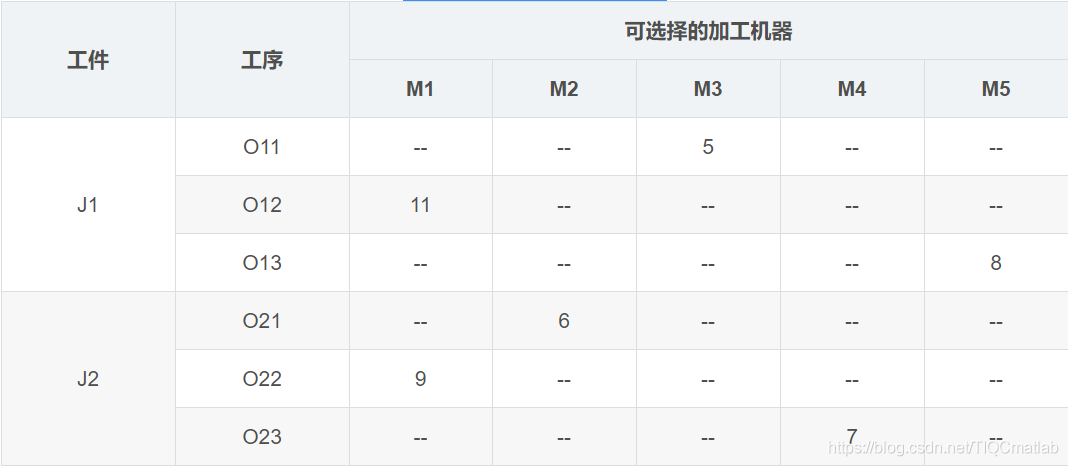
有若干工件,每个工件有若干工序,有多个加工机器,但是每道工序只能在一台机器上加工。对应到上面表格中的实例就是,两个工件,工件J1有三道工序,工序Q11只能在M3上加工,加工时间是5小时。
约束是对于一个工件来说,工序的相对顺序不能变。O11->O12->O13。每时刻,每个工件只能在一台机器上加工;每个机器上只能有一个工件。
调度的任务则是安排出工序的加工顺序,加工顺序确定了,因为每道工序只有一台机器可用,加工的机器也就确定了。
调度的目的是总的完工时间最短(也可以是其他目标)。举个例子,比如确定了O21->O22->O11->O23->O12->O13的加工顺序之后,我们就可以根据加工机器的约束,计算出总的加工时间。
M2加工O21消耗6小时,工件J2当前加工时间6小时。
M1加工O22消耗9小时,工件J2当前加工时间6+9=15小时。
M3加工O11消耗5小时,工件J1当前加工时间5小时。
M4加工O23消耗7小时,工件J2加工时间15+7=22小时。
M1加工O12消耗11小时,但是要等M1加工完O22之后才开始加工O12,所以工件J1的当前加工时间为max(5,9)+11=20小时。
M5加工O13消耗8小时,工件J2加工时间20+8=28小时。
总的完工时间就是max(22,28)=28小时。
3 柔性作业车间调度
柔性作业车间带调度实例(参考自高亮老师论文
《改进遗传算法求解柔性作业车间调度问题》——机械工程学报)

相比于传统作业车间调度,柔性作业车间调度放宽了对加工机器的约束,更符合现实生产情况,每个工序可选加工机器变成了多个,可以由多个加工机器中的一个加工。比如上表中的实例,J1的O12工序可以选择M2和M4加工,加工时间分别是8小时和4小时,但是并不一定选择M4加工,最后得出来的总的完工时间就更短,所以,需要调度算法求解优化。
相比于传统作业车间,柔性车间作业调度的调度任务不仅要确定工序的加工顺序,而且需要确定每道工序的机器分配。比如,确定了O21->O22->O11->O23->O12->O13的加工顺序,我们并不能相应工序的加工机器,所以还应该确定对应的[M1、M3、M5]->[M1、M2、M3]->[M1、M2、M3、M4、M5]->[M2、M3、M4、M5]->[M2、M4]->[M1、M3、M4、M5]的机器组合。调度的目的还是总的完工时间最短(也可以是其他目标,比如机器最大负荷最短、总的机器负荷最短)
二、蝴蝶优化算法(MBO)简介
1 介绍
蝴蝶优化算法(butterfly optimization algorithm, BOA)是Arora 等人于2019年提出的一种元启发式智能算法。该算法受到了蝴蝶觅食和交配行为的启发,蝴蝶接收/感知并分析空气中的气味,以确定食物来源/交配伙伴的潜在方向。
蝴蝶利用它们的嗅觉、视觉、味觉、触觉和听觉来寻找食物和伴侣,这些感觉也有助于它们从一个地方迁徙到另一个地方,逃离捕食者并在合适的地方产卵。在所有感觉中,嗅觉是最重要的,它帮助蝴蝶寻找食物(通常是花蜜)。蝴蝶的嗅觉感受器分散在蝴蝶的身体部位,如触角、腿、触须等。这些感受器实际上是蝴蝶体表的神经细胞,被称为化学感受器。它引导蝴蝶寻找最佳的交配对象,以延续强大的遗传基因。雄性蝴蝶能够通过信息素识别雌性蝴蝶,信息素是雌性蝴蝶发出的气味分泌物,会引起特定的反应。
通过观察,发现蝴蝶对这些来源的位置有非常准确的判断。此外,它们可以辨识出不同的香味,并感知它们的强度。蝴蝶会产生与其适应度相关的某种强度的香味,即当蝴蝶从一个位置移动到另一个位置时,它的适应度会相应地变化。当蝴蝶感觉到另一只蝴蝶在这个区域散发出更多的香味时,就会去靠近,这个阶段被称为全局搜索。另外一种情况,当蝴蝶不能感知大于它自己的香味时,它会随机移动,这个阶段称为局部搜索。
2 香味
为了理解BOA中的香味是如何计算的,首先需要理解,像气味、声音、光、温度等这样的模态是如何计算的。感知、处理这些模态需要知道三个重要的术语:感觉模态C、刺激强度I和幂指数a。在感觉模态中,感觉意味着测量能量的形式并以类似方式对其进行处理,而模态是指传感器使用的原始输入。不同的形态可以是气味,声音,光线,温度,在BOA中,模态是香味。I是物理刺激的大小。在BOA中,I与蝴蝶/解决方案的适应度相关。这意味着,当一只蝴蝶散发出更多的香味时,周围的其他蝴蝶可以感知到并被吸引。幂是强度增加的指数。参数a允许正则表达式、线性响应和响应压缩。响应扩展是当I增加时,香味(f)比I增长更快。响应压缩是当I增加时,f比I增长慢。线性响应是当I增加时,f成比例地增加。经实验证明,有时随着刺激的增强,昆虫对刺激变化的敏感性变得越来越低。因此在BOA中,为了估计I的大小,使用了响应压缩。
蝴蝶的自然现象基于两个重要问题:I的变化和f的表示。简单地说,蝴蝶的I与编码后的目标函数相关联。但是,f是相对的,即应该由其他蝴蝶来感知。史蒂文斯幂定律中,为了将气味与其他形式区别开来,使用了C。现在,当I较少的蝴蝶向I较多的蝴蝶移动时,f比I增加得更快。因此,我们应该允许f随幂指数参数a实现的吸收程度而变化。在BOA中,香味被表示为刺激物的物理强度的函数,如下所示:

3 具体算法
为了用搜索算法演示上述讨论,将蝴蝶的上述特征理想化如下:
(1)所有的蝴蝶都可以发出气味,这使蝴蝶间相互吸引。
(2)每只蝴蝶都会随机移动或朝最好的蝴蝶移动,散发出更多的芳香。
(3)蝴蝶的刺激强度受目标函数的景观影响或决定。
该算法分为三个阶段:(1)初始化阶段、(2)迭代阶段和(3)结束阶段。
在BOA的每次运行中,首先执行初始化阶段,然后进行迭代搜索,最后在找到最优解时终止算法。BOA中使用的参数值也会被分配,设置这些值后,算法将继续创建初始蝴蝶种群以进行优化。由于在BOA的模拟过程中蝴蝶总数保持不变,分配了一个固定大小的内存来存储信息。蝴蝶的位置是在搜索空间中随机生成的,并计算和存储它们的香味和适应值。这样就完成了初始化阶段,算法开始了迭代阶段,该阶段使用创建的人工蝶形执行搜索。算法的第二阶段,即迭代阶段,由算法执行多次迭代。在每次迭代中,解空间中的所有蝶形都移到新位置,然后重新评估其适应性值。算法首先计算解空间中不同位置的所有蝴蝶的适应度值。那么这些蝴蝶就会利用式1在自己的位置产生香味。该算法有两个关键步骤,即全局搜索阶段和局部搜索阶段。在全局搜索阶段,蝴蝶向最合适的蝴蝶/解g∗迈出一步,该蝴蝶/解g可以用公式(2)来表示。

这里,g∗表示在当前迭代的所有解中找到的当前最佳解;fi表示第i只蝴蝶的香味,r是[0,1]中的随机数。局部搜索阶段可以表示为

其中,xjt和xkt是解空间中的第j个蝴蝶和第k个蝴蝶。
蝴蝶寻找食物、交配伙伴可以在局部和全局范围内发生。考虑到地理上的接近和各种其他因素,如雨、风等,在整个交配伙伴或蝴蝶的觅食活动中,寻找食物可能占很大比例。因此,在BOA中使用切换概率p来在普通全局搜索和密集局部搜索之间切换。
在未达到停止标准之前,一直进行迭代。迭代结束的标准可以有多个,如使用的最大CPU时间、达到的最大迭代次数、没有改进的最大迭代次数、达到错误率的特定值或任何其他适当的标准。当迭代阶段结束时,算法输出具有最佳适应度的最优解。
三、部分源代码
clc;clear
%% 下载数据
% 加工数据包括加工时间,加工机器,机器数,各机器权重,工件数,各工件对应的工序数
load data operation_time operation_machine num_machine machine_weight num_job num_op
%% 基本参数
MAXGEN=200; % 最大迭代次数
sizepop=201; % 种群规模
e=0.5; % 目标值权重
N_size=30; % 邻域解数量
S_size=15; % 共享解数量
G=5; % 巡回次数
G1=20; % 竞争机制1参数
G2=10; % 竞争机制2参数
trace=zeros(2,MAXGEN);
chrom_best=[];
%% ===========================种群初始化============================
total_op_num=sum(num_op);
chroms=initialization(num_op,num_job,total_op_num,sizepop,operation_machine,operation_time);
[Z,~,~,~,~]=fitness(chroms,num_machine,e,num_job,num_op);
% 将最好的解划分为领飞鸟
[Z_leader,ind]=min(Z);
leader=chroms(ind,:);
% 从chroms中移出领飞鸟,然后划分左右两个跟飞鸟种群
chroms(ind,:)=[];
Z(ind)=[];
sp=(sizepop-1)/2;
lefts=chroms(1:sp,:);
Z_left=Z(1:sp);
rights=chroms(sp+1:end,:);
Z_right=Z(sp+1:end);
%% 候鸟算法中的交叉函数与遗传算法的不同
%% 候鸟算法输入两个染色体种群,分别来自左右队列
%--------------------------------------------------------------------------
function [lefts,Z_left,rights,Z_right]= crossover(lefts,rights,Z_left,Z_right,total_op_num,num_machine,e,num_job,num_op)
chroms1=lefts;
chroms2=rights;
for i=1:size(chroms1,1)
%% 面向工序码的交叉操作
% 父代染色体
parent1=lefts(i,:);
parent2=rights(i,:);
Job=randperm(num_job);
% 将工件随机分成两个集合
J1=Job(1:round(num_job/2));
J2=Job(length(J1)+1:end);
op_p1=[];
op_p2=[];
for j=1:length(J2)
%找出父代中J2片段对应的位置
op_p1=[op_p1,find(parent1(1:total_op_num)==J2(j))];
op_p2=[op_p2,find(parent2(1:total_op_num)==J2(j))];
end
op_s1=sort(op_p1);
op_s2=sort(op_p2);
% 子代1交换J2片段的基因,机器码对应位置的基因,工时码对应位置的基因
chroms1(i,op_s1)=parent2(op_s2);
chroms1(i,total_op_num+op_s1)=parent2(total_op_num+op_s2);
chroms1(i,total_op_num*2+op_s1)=parent2(total_op_num*2+op_s2);
% 子代2同理
chroms2(i,op_s2)=parent1(op_s1);
chroms2(i,total_op_num+op_s2)=parent1(total_op_num+op_s1);
chroms2(i,total_op_num*2+op_s2)=parent1(total_op_num*2+op_s1);
%% 面向机器码的交叉操作
parent1=chroms1(i,:);
parent2=chroms2(i,:);
% 随机产生与染色体长度相等的0,1序列
rand0_1=randi([0,1],1,total_op_num);
for n=1:num_job
ind_0=find(rand0_1(num_op(n)*(n-1)+1:num_op(n)*n)==0);
if ~isempty(ind_0)
ind1=find(parent1(1:total_op_num)==n);
ind2=find(parent2(1:total_op_num)==n);
chroms1(i,total_op_num+ind1(ind_0))=parent2(total_op_num+ind2(ind_0));
chroms1(i,total_op_num*2+ind1(ind_0))=parent2(total_op_num*2+ind2(ind_0));
chroms2(i,total_op_num+ind2(ind_0))=parent1(total_op_num+ind1(ind_0));
chroms2(i,total_op_num*2+ind2(ind_0))=parent1(total_op_num*2+ind1(ind_0));
end
end
end
%% 判断个体是否可以更新
[Z1,~,~,~,~]=fitness(chroms1,num_machine,e,num_job,num_op);
[Z2,~,~,~,~]=fitness(chroms2,num_machine,e,num_job,num_op);
lefts(Z1<Z_left,:)=chroms1(Z1<Z_left,:);
Z_left(Z1<Z_left)=Z1(Z1<Z_left);
rights(Z2<Z_right,:)=chroms2(Z2<Z_right,:);
Z_right(Z2<Z_right)=Z2(Z2<Z_right);
function [Z,makespan,machine_load,machine_weight,pvals] = fitness(chroms,num_machine,e,num_job,num_op)
sizepop=size(chroms,1);
pvals=cell(1,sizepop);
makespan=zeros(1,sizepop);
machine_load=makespan;
total_op_num=sum(num_op); % 总工序数
for k=1:sizepop
chrom=chroms(k,:);
machine=zeros(1,num_machine); % 记录各机器变化时间
job=zeros(1,num_job); % 记录各工件变化时间
machine_time=zeros(1,num_machine); % 计算各机器的实际加工时间
pval=zeros(2,total_op_num); % 记录各工序开始和结束时间
for i=1:total_op_num
else
pval(1,i)=job(chrom(i));
job(chrom(i))=job(chrom(i))+chrom(total_op_num*2+i);
machine(chrom(total_op_num+i))=job(chrom(i));
pval(2,i)=job(chrom(i));
end
machine_time(chrom(total_op_num+i))=machine_time(chrom(total_op_num+i))+chrom(total_op_num*2+i);
end
makespan(k)=max(machine);
machine_weight=machine_time;
machine_load(k)=max(machine_weight)-min(machine_weight);
pvals{k}=pval;
end
Z=e*makespan+(1-e)*machine_load;
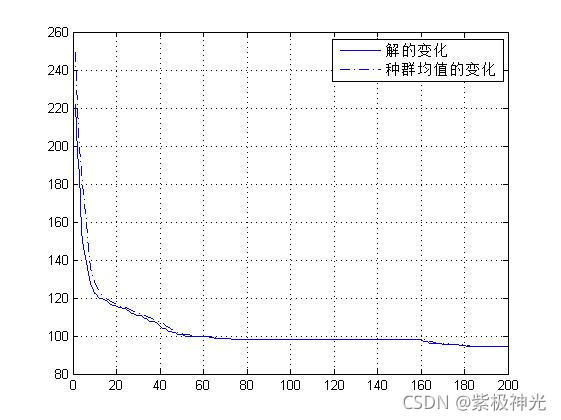
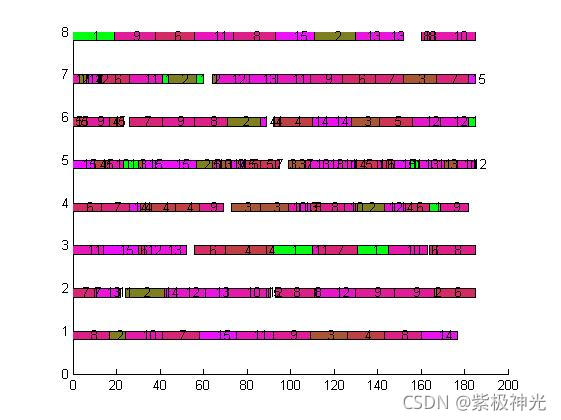
四、运行结果

五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]蝴蝶优化算法
以上就是matlab鸟群算法求解车间调度问题详解及实现源码的详细内容,更多关于matlab鸟群算法求解车间调度问题的资料请关注我们其它相关文章!
相关推荐
-

Matlab实现简单扩频语音水印算法详解
目录 一.实验背景 1.实验目的 2.实验环境 3.原理简介 二.基础知识 1.PN序列 2.时域到频域变换的原因 3.三种时域到频域变换的区别 三.算法源码 1.PN产生函数 2.隐藏算法 3.提取算法 4.测试脚本 四.运行测试 1.无攻击(误码率0.000976): 2.AU格式转换(误码率0.001921): 3.压缩与解压缩(误码率0.002029): 一.实验背景 1.实验目的 了解扩频通信原理,掌握扩频水印算法的基本原理,设计并实现一种基于音频的扩频水印算法,了解参数对扩频水印算法
-
MATLAB Delaunay算法提取离散点边界的方法
最近在项目进行中遇到要提取离散点边界的问题,像我这样的对于matlab不是特别熟练的朋友一开始肯定摸不着头脑,到底选用哪种算法可以有效地提取到所有已知点的轮廓线呢.本人经过大量的文献搜索及代码实验找到了几个效果比较好的轮廓提取代码,在这里做个总结,并且希望能够对遇到同样问题的朋友有所启发. 关于离散点边界提取的三种方法: 1.Convhull 离散点集获得边界 2.Alpha Shape算法检测边缘点 3.Delaunay 三角剖分算法 前两种方法在之前的博客中已经做了总结这里就不展开了,现在主
-
matlab鸟群算法求解车间调度问题详解及实现源码
目录 一.车间调度简介 1 车间调度定义 2 传统作业车间调度 3 柔性作业车间调度 二.蝴蝶优化算法(MBO)简介 1 介绍 2 香味 3 具体算法 三.部分源代码 五.matlab版本及参考文献 一.车间调度简介 1 车间调度定义 车间调度是指根据产品制造的合理需求分配加工车间顺序,从而达到合理利用产品制造资源.提高企业经济效益的目的.车间调度问题从数学上可以描述为有n个待加工的零件要在m台机器上加工.问题需要满足的条件包括每个零件的各道工序使用每台机器不多于1次,每个零件都按照一定的顺序进
-
详解从Linux源码看Socket(TCP)的bind
目录 一.一个最简单的Server端例子 二.bind系统调用 2.1.inet_bind 2.2.inet_csk_get_port 三.判断端口号是否冲突 四.SO_REUSEADDR和SO_REUSEPORT 五.SO_REUSEADDR 六.SO_REUSEPORT 七.总结 一.一个最简单的Server端例子 众所周知,一个Server端Socket的建立,需要socket.bind.listen.accept四个步骤. 代码如下: void start_server(){ // se
-
C语言实现扫雷游戏详解(附源码)
目录 1.游戏的功能 2.游戏实现的基本思路 2.1实现菜单给玩家选择 2.2初始化棋盘 2.3数组大小的问题 2.4对棋盘赋值 2.5打印棋盘 2.6布置雷 2.7排查雷 3.代码基本实现部分 3.1主函数部分 3.2 初始化棋盘 3.3对两个棋盘进行赋值 3.4打印棋盘 3.5布置雷 3.6排查雷 3.7函数声明 4.扫雷游戏的源代码 总结 1.游戏的功能 游戏的主要功能有 1:棋盘内有若干个雷 2:玩家输入要排查雷的坐标 3:在玩家输入的坐标处显示周围八个坐标有几个雷 3:若玩家将所有的
-
Android开发使用HttpURLConnection进行网络编程详解【附源码下载】
本文实例讲述了Android开发使用HttpURLConnection进行网络编程.分享给大家供大家参考,具体如下: --HttpURLConnection URLConnection已经可以非常方便地与指定站点交换信息,URLConnection下还有一个子类:HttpURLConnection,HttpURLConnection在URLConnection的基础上进行改进,增加了一些用于操作HTTP资源的便捷方法. setRequestMethod(String):设置发送请求的方法 get
-
Python实现的ftp服务器功能详解【附源码下载】
本文实例讲述了Python实现的ftp服务器功能.分享给大家供大家参考,具体如下: python 具备强大的网络编程功能,而且代码简介,用简单的代码,就能实现一个功能强大的FTP 服务器.我亲自测试了这个 python ftp server. 代码下载,在文章的末尾处,整个部署介绍如下: 1. 环境, python 2.7.3 ,centos 6.2 . 2. 定义服务器ip ,端口等信息,可以在下载的源码中查看 listen_ip = "192.168.4.128" # ftp se
-
PHP生成二维码与识别二维码的方法详解【附源码下载】
本文实例讲述了PHP生成二维码与识别二维码的方法.分享给大家供大家参考,具体如下: 二维码的分类 线性堆叠式二维码 矩阵式二维码 二维码的优缺点 优点 信息容量大 编码范围广 容错能力强 译码可靠性高 可引入加密措施 成本低,易制作 缺点 二维码技术成为手机病毒.钓鱼网站传播的新渠道 信息泄密 目前流行的三大国际标准 PDF417:不支持中文 DM:专利未公开,需支付专利费用 QR CODE:专利公开,支持中文 QR CODE 纠错能力 L级:约可纠错7%的数据码字 M级:约可纠错15%的数据码
-
jQuery自定义动画函数实例详解(附demo源码)
本文实例讲述了jQuery自定义动画函数完整实现技巧.分享给大家供大家参考,具体如下: 运行效果截图如下: 在线演示地址如下: http://demo.jb51.net/js/2015/jquery-zdy-dh-move-style-demo/ 具体代码如下: <!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Strict//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-strict.d
-
JS实现导出Excel的五种方法详解【附源码下载】
本文实例讲述了JS实现导出Excel的五种方法.分享给大家供大家参考,具体如下: 这五种方法前四种方法只支持IE浏览器,最后一个方法支持当前主流的浏览器(火狐,IE,Chrome,Opera,Safari) <!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8"> <title>html 表格导出道</title> <sc
-
Angular X中使用ngrx的方法详解(附源码)
前言 ngrx 是 Angular框架的状态容器,提供可预测化的状态管理.下面话不多说,来一起看看详细的介绍: 1.首先创建一个可路由访问的模块 这里命名为:DemopetModule. 包括文件:demopet.html.demopet.scss.demopet.component.ts.demopet.routes.ts.demopet.module.ts 代码如下: demopet.html <!--暂时放一个标签--> <h1>Demo</h1> demopet
-
详解vue mint-ui源码解析之loadmore组件
本文介绍了vue mint-ui源码解析之loadmore组件,分享给大家,具体如下: 接入 官方接入文档mint-ui loadmore文档 接入使用Example html <div id="app"> <mt-loadmore :top-method="loadTop" :bottom-method="loadBottom" :bottom-all-loaded="allLoaded" :max-dis