OpenCV特征提取与检测之Harris角点检测
目录
- 前言
- 1. 效果图
- 2. 原理
- 3. 源码
- 3.1 Harris角点检测
- 3.2 精细角点检测
- 总结
前言
这篇博客将了解什么是特征,角点,哈里斯角点检测(Harris Corner Detection)的概念。并使用cv2.cornerHarris(),cv2.cornerSubPix()实现哈里斯角点检测;
1. 效果图
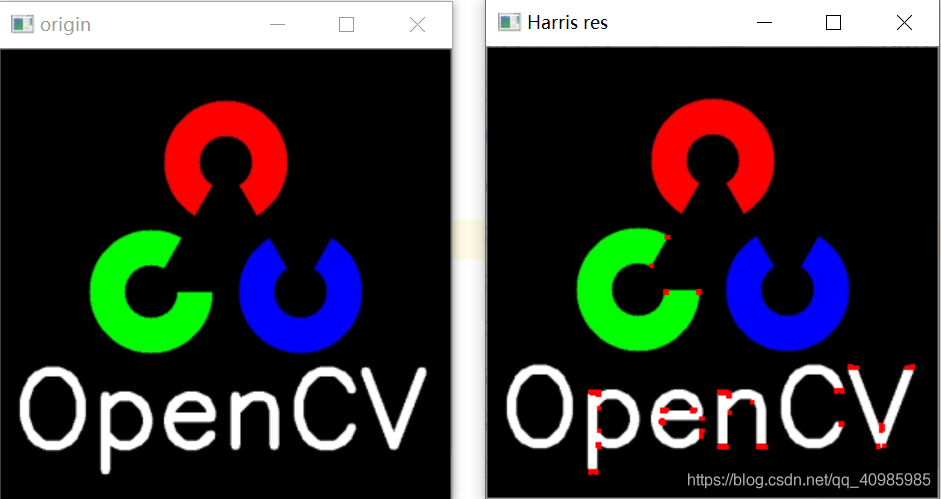
原图 VS Harris角点检测效果图如下:
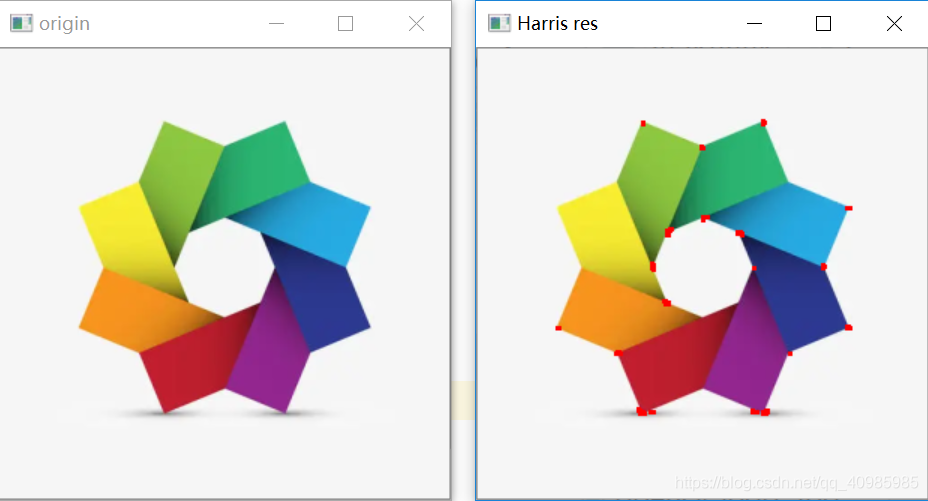
原图 VS Harris角点检测效果图如下:
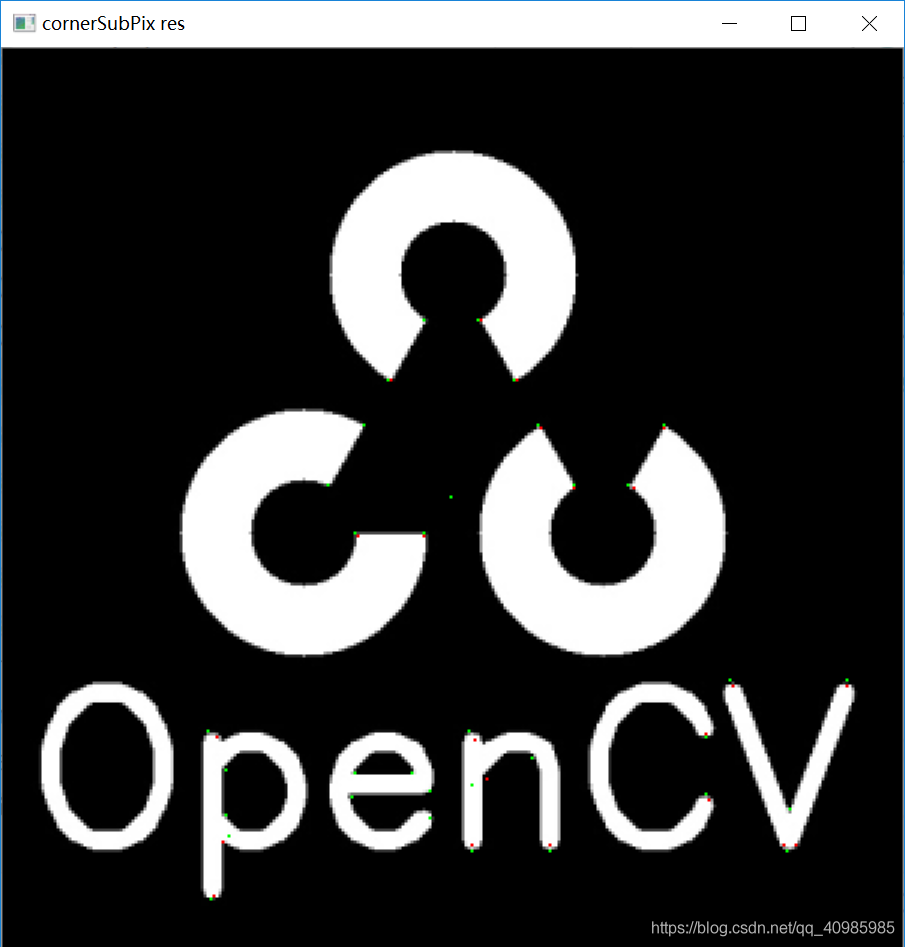
惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
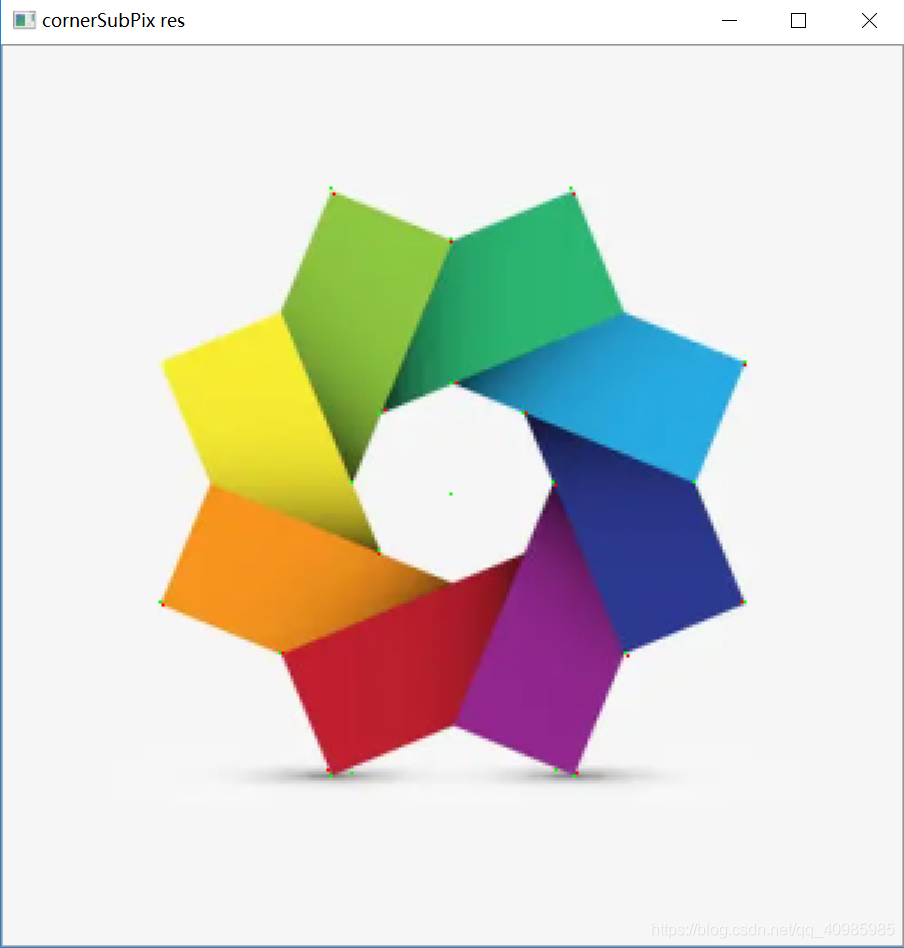
惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
2. 原理
图像最重要的一个要素是特征,一旦有了特征及其描述,就可以在所有图像中找到相同的特征,并将它们对齐、缝合或执行任何您想要的操作。
特征可分为角、边、平面,OpenCV提供了许多不同的算法来查找特征、描述特征、匹配特征等。
角点是图像中各个方向上强度变化较大的区域。
Harris角点检测的结果是一个灰度图像与这些分数。对一个合适的图像进行阈值化可以得到图像中的角点。
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
img: 输入图像,灰度图像,float32
blockSize: 用于角点检测的邻域的大小
ksize: Sobel导数的孔径参数
k: 方程中的k-Harris检测器自由参数
dst:返回值,灰度图像
corners = cv2.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
具有亚像素精度的角点:有时可能需要以最大的精度找到角点。OpenCV附带了一个函数cv2.cornerSubPix(),它可以进一步细化以亚像素精度检测到的角点。
使用 Harris 角点检测器检查逆矩阵的相似性。它表示角点是更好的跟踪点。
3. 源码
3.1 Harris角点检测
# Harris角点检测
import cv2
import numpy as np
img = cv2.imread('images/polygon.jpg')
img = cv2.imread('images/opencv_logo.jpg')
print(img.shape)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow("origin", img)
cv2.waitKey(0)
gray = np.float32(gray)
# res = cv2.cornerHarris(gray, 2, 3, 0.04)
# - img: 输入图像,灰度图像,float32
# - blockSize: 用于角点检测的邻域的大小
# - ksize: Sobel导数的孔径参数
# - k: 方程中的k-Harris检测器自由参数
# - res:返回值,灰度图像
res = cv2.cornerHarris(gray, 2, 3, 0.04)
# 扩大标记的内容
res = cv2.dilate(res, None)
# 最佳阈值因图而异
img[res > 0.01 * res.max()] = [0, 0, 255]
cv2.imshow('Harris res', img)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()
3.2 精细角点检测
# 具有亚像素精度的角点
# 有时可能需要以最大的精度找到角点。OpenCV附带了一个函数cv2.cornerSubPix(),它可以进一步细化以亚像素精度检测到的角点。
import cv2
import imutils
import numpy as np
filename = 'images/polygon.jpg'
img = cv2.imread(filename)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 寻找Harris角点
gray = np.float32(gray)
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
dst = cv2.dilate(dst, None)
ret, dst = cv2.threshold(dst, 0.01 * dst.max(), 255, 0)
dst = np.uint8(dst)
# 寻找中心点
ret, labels, stats, centroids = cv2.connectedComponentsWithStats(dst)
# 定义停止和细化角点的条件
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv2.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
# 绘制角点和细化的亚像素点
res = np.hstack((centroids, corners))
res = np.int0(res)
# Harris角点用红色像素标记,精细角点用绿色像素标记
img[res[:, 1], res[:, 0]] = [0, 0, 255]
img[res[:, 3], res[:, 2]] = [0, 255, 0]
gray = cv2.cvtColor(gray, cv2.COLOR_GRAY2BGR)
cv2.imshow("gray", img)
gray[res[:, 1], res[:, 0]] = [0, 0, 255]
gray[res[:, 3], res[:, 2]] = [0, 255, 0]
cv2.imshow('cornerSubPix res', imutils.resize(img, width=600))
cv2.waitKey(0)
参考 https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_features_harris/py_features_harris.html#harris-corners
总结
到此这篇关于OpenCV特征提取与检测之Harris角点检测的文章就介绍到这了,更多相关OpenCV Harris角点检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
OpenCV哈里斯(Harris)角点检测的实现
环境 pip install opencv-python==3.4.2.16 pip install opencv-contrib-python==3.4.2.16 理论 克里斯·哈里斯(Chris Harris)和迈克·史蒂芬斯(Mike Stephens)在1988年的论文<组合式拐角和边缘检测器>中做了一次尝试找到这些拐角的尝试,所以现在将其称为哈里斯拐角检测器. 函数:cv2.cornerHarris(),cv2.cornerSubPix() 示例代码 import cv2 impor
-

Android基于OpenCV实现Harris角点检测
目录 什么是角点? 为什么要检测角点? Harris角点检测 API 操作 效果 源码 什么是角点? 角点就是极值点,即在某方面属性特别突出的点.当然,你可以自己定义角点的属性(设置特定熵值进行角点检测).角点可以是两条线的交叉处,也可以是位于相邻的两个主要方向不同的事物上的点.角点通常被定义为两条边的交点,或者说,角点的局部邻域应该具有两个不同区域的不同方向的边界.常见的角点有: 灰度梯度的最大值对应的像素点: 两条直线或者曲线的交点: 一阶梯度的导数最大值和梯度方向变化率最大的像素点: 一阶
-
python 实现Harris角点检测算法
算法流程: 将图像转换为灰度图像 利用Sobel滤波器求出 海森矩阵 (Hessian matrix) : 将高斯滤波器分别作用于Ix².Iy².IxIy 计算每个像素的 R= det(H) - k(trace(H))².det(H)表示矩阵H的行列式,trace表示矩阵H的迹.通常k的取值范围为[0.04,0.16]. 满足 R>=max(R) * th 的像素点即为角点.th常取0.1. Harris算法实现: import cv2 as cv import numpy as np impo
-
OpenCV特征提取与检测之Harris角点检测
目录 前言 1. 效果图 2. 原理 3. 源码 3.1 Harris角点检测 3.2 精细角点检测 总结 前言 这篇博客将了解什么是特征,角点,哈里斯角点检测(Harris Corner Detection)的概念.并使用cv2.cornerHarris(),cv2.cornerSubPix()实现哈里斯角点检测: 1. 效果图 原图 VS Harris角点检测效果图如下: 原图 VS Harris角点检测效果图如下: 惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
-
Python中OpenCV图像特征和harris角点检测
目录 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 import cv2 import numpy as np img =cv2.imread('pie.png') print('img.shape',img.
-
OpenCV半小时掌握基本操作之角点检测
目录 概述 角点检测 角点检测代码 概述 OpenCV 是一个跨平台的计算机视觉库, 支持多语言, 功能强大. 今天小白就带大家一起携手走进 OpenCV 的世界. 角点检测 角点检测 (Corner Detection) 是图像的重要特征. 角点可以帮助我们实现图像对其, 图像拼接, 目标识别等等重要用途. Harris 角点检测 (Harris Corner Detection) 是最基础也是最重要的一种角点检测算法. 通过计算图像在 x, y 上平移的自相似性 (Self-Similari
-
OpenCV特征提取与检测之Shi-Tomasi角点检测器
前言 角点通常被定义为两条边的交点,或者说,角点的局部邻域应该具有两个不同区域的不同方向的边界.角点检测(Corner Detection)是计算机视觉系统中获取图像特征的一种方法,广泛应用于运动检测.图像匹配.视频跟踪.三维重建和目标识别等,也可称为特征点检测. 角点检测算法的基本思想: 使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点. 目前,角点检测算法还不是十
-
OpenCV角点检测的实现示例
目录 Harris 角点检测算法 1. 角点 角点检测算法的基本思想: 2. 流程 3. 实现 Harris 角点检测算法 1. 角点 角点是水平方向.垂直方向变化都很大的像素. 角点检测算法的基本思想: 使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点. 目前,角点检测算法还不是十分完善,许多算法需要依赖大量的训练集和冗余数据来防止和减少错误的特征的出现.对于角点检
-
opencv实现角点检测
本文实例为大家分享了opencv实现角点检测的具体代码,供大家参考,具体内容如下 1.特征点的作用:使用特征点代表图像内容 运动目标跟踪物体识别图像配准全景图像拼接三维重建 2.Harris角点检测基本思想 角点定义 :窗口向任意方向的移动都导致图像灰度的明显变化 平坦区域:任意方向移动,无灰度变化 边缘: 沿着边缘方向移动,无灰度变化 #include "opencv2/opencv.hpp" #include <iostream> using namespace cv;
-
Java OpenCV图像处理之SIFT角点检测详解
目录 介绍 示例代码 效果图 补充 介绍 在某些情况下对图像进行缩放后,角点信息可能会丢失,这时候Harri便不能检测到所有的角点.SIFT(scale-invariant feature transform) 刚好克服了这个问题,对图像特征的检测,尽量不受图像尺寸变化的影响.SIFT并不直接检测关键点. 其中关键点的检测是由DOG(Difference of Gaussians)检测完成的(DOG是通过不同的高斯滤波器对同一张图像进行处理,来得到关键点的).SIFT仅通过特征向量来描述特征点周