Opencv中cv2.floodFill算法的使用
目录
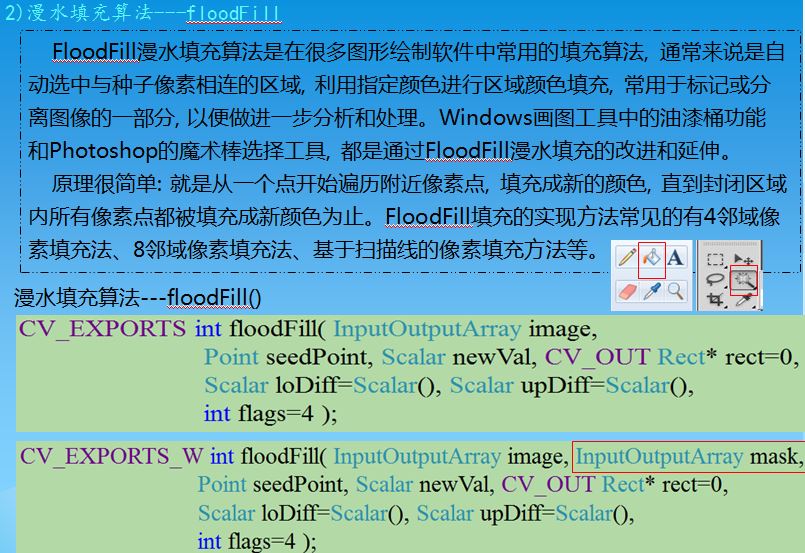
- 一、 泛洪算法——floodFill函数原型
- 二、简单应用
- 三、应用,结合minareaRect
一、 泛洪算法——floodFill函数原型
cv2.floodFill(img,mask,seed,newvalue(BGR),(loDiff1,loDiff2,loDiff3),(upDiff1,upDiff2,upDiff3),flag)
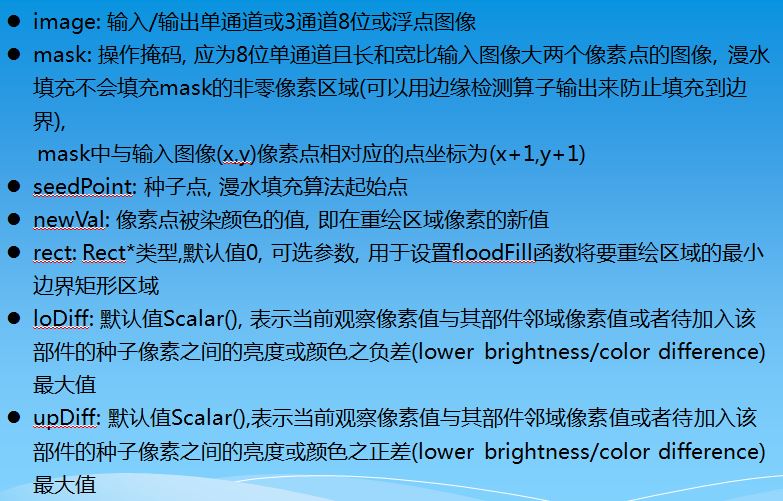
- img:为待使用泛洪算法的图像
- mask:为掩码层,使用掩码可以规定是在哪个区域使用该算法,如果是对于完整图像都要使用,则掩码层大小为原图行数+2,列数+2.是一个二维的0矩阵,边缘一圈会在使用算法是置为1。而只有对于掩码层上对应为0的位置才能泛洪,所以掩码层初始化为0矩阵。【dtype:np.uint8】
- seed:为泛洪算法的种子点,也是根据该点的像素判断决定和其相近颜色的像素点,是否被泛洪处理。
【类似于 】
】
- newvalue:是对于泛洪区域新赋的值(B,G,R)
- (loDiff1,loDiff2,loDiff3):是相对于seed种子点像素可以往下的像素值,即seed(B0,G0,R0),泛洪区域下界为(B0-loDiff1,G0-loDiff2,R0-loDiff3)
- (upDiff1,upDiff2,upDiff3):是相对于seed种子点像素可以往上的像素值,即seed(B0,G0,R0),泛洪区域上界为(B0+upDiff1,G0+upDiff2,R0+upDiff3)
- flag:为泛洪算法的处理模式。

- 低八位 控制算法的连通性,是以seed点为中心,接着判断周围的几个像素点,再将泛洪区域像素点周围的几个像素点进行考虑。 一般为4,8;默认为4
- 中间八位 与掩码层赋值密切相关,一般使用(255<<8)使中间8位全位1,则值为255,也就是掩码层对应原图的泛洪区域的部分被由原来的初值0赋值成255,如果中间8位为0,则赋值为1.
- 高八位 由opencv宏参数指定
- cv2.FLOODFILL_FIXED_RANGE:改变图像,填充newvalue
- cv2.FLOODFILL_MASK_ONLY:不改变原图像,也就是newvalue参数失去作用,而是改变对应区域的掩码,设为中间八位的值
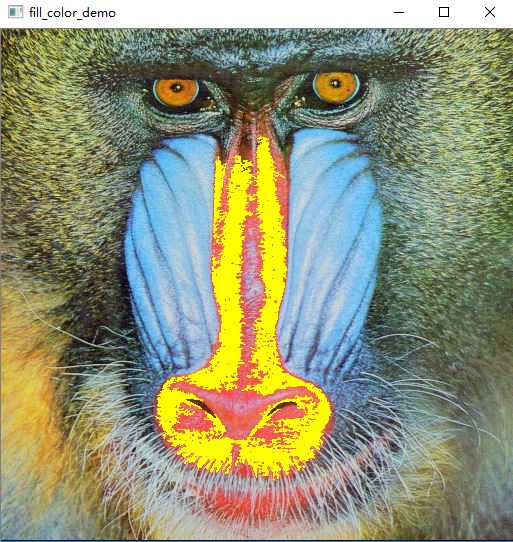
二、简单应用
#泛洪填充(彩色图像填充)
import cv2
import numpy as np
def fill_color_demo(image):
copyImg = image.copy()
h, w = image.shape[:2]
mask = np.zeros([h+2, w+2],np.uint8) #mask必须行和列都加2,且必须为uint8单通道阵列
#为什么要加2可以这么理解:当从0行0列开始泛洪填充扫描时,mask多出来的2可以保证扫描的边界上的像素都会被处理
cv.floodFill(copyImg, mask, (220, 250), (0, 255, 255), (100, 100, 100), (50, 50 ,50), cv.FLOODFILL_FIXED_RANGE)
cv.imshow("fill_color_demo", copyImg)
src = cv.imread('E:/imageload/baboon.jpg')
cv.namedWindow('input_image', cv.WINDOW_AUTOSIZE)
cv.imshow('input_image', src)
fill_color_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()

三、应用,结合minareaRect
cv2.floodFill(initial_car,mask,(seed_x,seed_y),(255,0,0),(loDiff,loDiff,loDiff),(upDiff,upDiff,upDiff),flag)
points = []
row,column = mask.shape
for i in range(row):
for j in range(column):
if mask[i][j]==255:
points.append((j,i)) #点应该输入点坐标(列,行)
points = np.asarray(points)
new_rect = cv2.minAreaRect(points)
到此这篇关于Opencv中cv2.floodFill算法的使用的文章就介绍到这了,更多相关Opencv cv2.floodFill内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
Python OpenCV之图片缩放的实现(cv2.resize)
OpenCV函数原型: cv2.resize(InputArray src, OutputArray dst, Size, fx, fy, interpolation) 参数解释: InputArray src 输入图片 OutputArray dst 输出图片 Size 输出图片尺寸 fx, fy 沿x轴,y轴的缩放系数 interpolation 插入方式 interpolation 选项所用的插值方法: INTER_NEAREST 最近邻插值 INTER_LINEAR 双线性插值(默认设置
-
对python opencv 添加文字 cv2.putText 的各参数介绍
如下所示: cv2.putText(img, str(i), (123,456)), font, 2, (0,255,0), 3) 各参数依次是:图片,添加的文字,左上角坐标,字体,字体大小,颜色,字体粗细 其中字体可以选择 FONT_HERSHEY_SIMPLEX Python: cv.FONT_HERSHEY_SIMPLEX normal size sans-serif font FONT_HERSHEY_PLAIN Python: cv.FONT_HERSHEY_PLAIN small s
-

Python-OpenCV中的cv2.inpaint()函数的使用
目录 概念 库函数 实现 代码 概念 修复是图像插值.数字修复算法在图像插值,照片恢复,缩放和超分辨率等方面具有广泛的应用. 大多数人会在家里放一些旧的退化照片,上面有一些黑点,一些笔画等.你有没有想过恢复它?我们不能简单地在绘画工具中擦除它们,因为它将简单地用白色结构替换黑色结构,这是没有用的.在这些情况下,使用称为图像修复的技术.基本思路很简单:用邻近的像素替换那些坏标记,使其看起来像是邻居(取自维基百科),考虑下面显示的图像: 库函数 dst = cv2.inpaint(src,mask,
-
python-opencv 中值滤波{cv2.medianBlur(src, ksize)}的用法
python-opencv 中值滤波{cv2.medianBlur(src, ksize)} 中值滤波将图像的每个像素用邻域 (以当前像素为中心的正方形区域)像素的 中值 代替 .与邻域平均法类似,但计算的是中值 #用中值法 for y in xrange(1,myh-1): for x in xrange(1,myw-1): lbimg[y,x]=np.median(tmpimg[y-1:y+2,x-1:x+2] 下面调用opencv的函数 # -*- coding: utf-8 -*- #c
-
Python-OpenCV:cv2.imread(),cv2.imshow(),cv2.imwrite()的区别
目录 为什么使用Python-OpenCV? 基本操作 1.图像读入 2.显示图片 3.保存图片 变换操作 1.翻转图片 2.复制图片 3.颜色空间转换 4.裁剪图片 综合示例 参考链接: 为什么使用Python-OpenCV? 虽然python 很强大,而且也有自己的图像处理库PIL,但是相对于OpenCV 来讲,它还是弱小很多.跟很多开源软件一样OpenCV 也提供了完善的python 接口,非常便于调用.OpenCV 的最新版是4.0,包含了超过2500 个算法和函数,几乎任何一个能想到的
-
Opencv-Python图像透视变换cv2.warpPerspective的示例
Opencv-Python图像透视变换cv2.warpPerspective 代码如下: # -*- coding:utf-8 -*- import cv2 import numpy as np import sys img = cv2.imread('test.jpg') # cv2.imshow("original", img) # 可选,扩展图像,保证内容不超出可视范围 img = cv2.copyMakeBorder(img, 200, 200, 200, 200, cv2.B
-
Opencv中cv2.floodFill算法的使用
目录 一. 泛洪算法--floodFill函数原型 二.简单应用 三.应用,结合minareaRect 一. 泛洪算法--floodFill函数原型 cv2.floodFill(img,mask,seed,newvalue(BGR),(loDiff1,loDiff2,loDiff3),(upDiff1,upDiff2,upDiff3),flag) img:为待使用泛洪算法的图像 mask:为掩码层,使用掩码可以规定是在哪个区域使用该算法,如果是对于完整图像都要使用,则掩码层大小为原图行数+2,列
-
Opencv中cv2.cvtColor彩色图转灰度图的其他6种方法
目录 1.公式集成: 2.代码实现: 3.实验结果: 4.参考文章: 1.公式集成: 2.代码实现: import os import cv2 import queue import threading import numpy as np #用户存取函数的返回值 q=queue.Queue() def rgb2gray(image,method): h,w,c=image.shape gray=np.zeros((h,w),dtype=np.uint8) y=0 for row in rang
-
OpenCV图像分割之分水岭算法与图像金字塔算法详解
目录 前言 一.使用分水岭算法分割图像 1.cv2.distanceTransform()函数 2.cv2.connectedComponents()函数 3.cv2.watershed()函数 二.图像金字塔 1.高斯金字塔向下采样 2.高斯金字塔向上采样 3.拉普拉斯金字塔 4.应用图像金字塔实现图像的分割和融合 前言 主要介绍OpenCV中的分水岭算法.图像金字塔对图像进行分割的方法. 一.使用分水岭算法分割图像 分水岭算法的基本原理为:将任意的灰度图像视为地形图表面,其中灰度值高的部分表
-
C++中实现OpenCV图像分割与分水岭算法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征. API介绍 void watershed( InputArray image, InputOutputArray markers ); 参数说明: image: 必须是一个8bit 3通道彩色图像矩阵序列 markers: 在执行分水岭函数watershed之前,必须对第二个参数markers
-
openCV中meanshift算法查找目标的实现
目录 一.简介 二.实现过程 1.设定感兴趣的区域 2.获取脸部直方图并做归一化 3.反向投影,用meanshift查找目标 三.其他实验结果 四.部分原理补充 五.完整代码 一.简介 图像直方图的反向投影是一个概率分布图,表示一个指定图像片段出现在特定位置的概率.当我们已知图像中某个物体的大体位置时,可以通过概率分布图找到物体在另一张图像中的准确位置.我们可以设定一个初始位置,在其周围反复移动来提高局部匹配概率,从而找到物体的准确位置,这个实现过程叫做均值平移算法. 二.实现过程 因为人物的面
-
opencv中颜色空间转换函数cv2.cvtColor()使用
opencv中有多种色彩空间,包括 RGB.HSI.HSL.HSV.HSB.YCrCb.CIE XYZ.CIE Lab8种,使用中经常要遇到色彩空间的转化,以便生成mask图等操作. 可以使用下面的色彩空间转化函数 cv2.cvtColor( )进行色彩空间的转换: HSV 表示hue.saturation.value image_hsv = cv2.cvtColor(image,cv2.COLOR_BGR2HSV) 用这个函数把图像从RGB转到HSV夜色空间,注意是BGR2HSV,因为在ope
-
OpenCV中Grabcut算法的具体使用
目录 Grabcut 算法的基本步骤: Grabcut的相关API: Grabcut 算法的代码示例: Grabcut 算法主要运用于计算机视觉中的前背景分割,立体视觉和抠图等.该算法利用了图像中的纹理(颜色)信息和边界(反差)信息,只要少量的用户交互操作即可得到比较好的分割结果. 1. Grabcut 的目标和背景的模型是RGB三通道的混合高斯模型GMM; 2. Grab Cut为一个不断进行分割估计和模型参数学习的交互迭代过程: 3. Grab Cut只需要提供背景区域的像素集就可以了.也就
-
利用Opencv中Houghline方法实现直线检测
利用Opencv中的Houghline方法进行直线检测-python语言 这是给Python部落翻译的文章,请在这里看原文. 在图像处理中,霍夫变换用来检测任意能够用数学公式表达的形状,即使这个形状被破坏或者有点扭曲. 下面我们将看到利用HoughLine算法来阐述霍夫变化进行直线检测的原理,把此算法应用到特点图像的边缘检测是可取的.边缘检测方法请参考这篇文章–边缘检测. Houghline算法基础 直线可以表示为y=mx+c,或者以极坐标形式表示为r=xcosθ+ysinθ,其中r是原点到直线
-
OpenCV中Canny边缘检测的实现
目录 1. Canny 边缘检测理论 1.1.高斯滤波 1.2.Sobel算子计算梯度和方向 1.3.非极大值抑制(定位准确的边缘同时可缩小边缘线宽) 1.4.双阈值检测 2. OpenCV 之 Canny 边缘检测 边缘检测一般是识别目标图像中亮度变化明显的像素点. 因为显著变化的像素点通常反映了图像变化比较重要的地方. 1. Canny 边缘检测理论 Canny 是一种常用的边缘检测算法. 其是在 1986 年 John F.Canny 提出的. Canny 是一种 multi-stage
-
图文详解OpenCV中光流以及视频特征点追踪
目录 前言 1. 效果图 2. 原理 2.1 什么是光流?光流追踪的前提.原理 2.2 光流的应用 2.3 光流的2种方法 3. 源码 3.2 稀疏光流追踪 3.2 优化版稀疏光流追踪 3.3 密集光流追踪 总结 前言 这篇博客将介绍光流的概念以及如何使用 Lucas-Kanade 方法估计光流,并演示如何使用 cv2.calcOpticalFlowPyrLK() 来跟踪视频中的特征点. 1. 效果图 光流追踪效果图如下: 它显示了一个球在连续 5 帧中移动.箭头表示其位移矢量. 不是很严谨的-