opencv3/C++ 实现SURF特征检测
SURF即Speeded Up Robust Features加速鲁棒特征;
SURF可以用于对象定位和识别、人脸识别、3D重建、对象跟踪和提取兴趣点等。
工作原理:
1、选择图像中POI(Points of Interest) Hessian Matrix;
2、在不同的尺度空间发现关键点,非最大信号压制;
3、发现特征点方法、旋转不变性要求;
4、生成特征向量;

类SURF中成员函数create()参数说明:
static Ptr<SURF> create( double hessianThreshold=100,//SURF中使用的hessian关键点检测器的阈值 int nOctaves = 4, //关键点检测器将使用的金字塔组数量 int nOctaveLayers = 3,//高斯金字塔每个组内图像的层数 bool extended = false, //扩展描述符标志(true使用扩展的128个元素的描述符,false使用64个元素的描述符) bool upright = false//旋转的特征标志(true不计算方向,false计算方向) );
函数detect()用来检测图像或图像集中的关键点。
基类Feature2D中成员函数detect()参数说明:
void detect( InputArray image,//图像 CV_OUT std::vector<KeyPoint>& keypoints,//检测到的关键点,(在图像集中关键点[i]是在图像[i]中检测到的一组关键点) InputArray mask=noArray() //指定在哪里寻找关键点的掩码(必须是在感兴趣区域中具有非零值的8位整数矩阵) );
函数drawKeypoints()的参数说明:
void drawKeypoints( InputArray image, //源图像 const std::vector<KeyPoint>& keypoints, //来自源图像的关键点 InputOutputArray outImage,//输出图像 const Scalar& color=Scalar::all(-1), //关键点的颜色 int flags=DrawMatchesFlags::DEFAULT //设置绘图功能的标志 );
函数drawKeypoints()用来绘制关键点。
SURF特征检测示例:
#include<opencv2/opencv.hpp>
#include<opencv2/xfeatures2d.hpp>
using namespace cv;
using namespace cv::xfeatures2d;
Mat src;
int minHessian = 50;
void trackBar(int, void*);
int main()
{
src = imread("E:/image/image/bdb.jpg");
if (src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
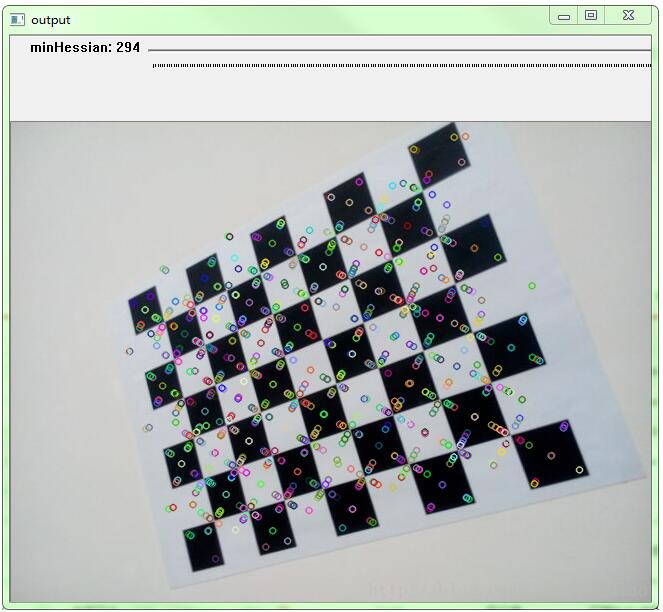
namedWindow("output", WINDOW_AUTOSIZE);
createTrackbar("minHessian","output",&minHessian, 500, trackBar);
waitKey(0);
return 0;
}
void trackBar(int, void*)
{
Mat dst;
// SURF特征检测
Ptr<SURF> detector = SURF::create(minHessian);
std::vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());
// 绘制关键点
drawKeypoints(src, keypoints, dst, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("output", dst);
}
以上这篇opencv3/C++ 实现SURF特征检测就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
C++利用opencv实现人脸检测
小编所有的帖子都是基于unbuntu系统的,当然稍作修改同样试用于windows的,经过小编的绞尽脑汁,把刚刚发的那篇python 实现人脸和眼睛的检测的程序用C++ 实现了,当然,也参考了不少大神的博客,下面我们就一起来看看: Linux系统下安装opencv我就再啰嗦一次,防止有些人没有安装没调试出来喷小编的程序是个坑, sudo apt-get install libcv-dev sudo apt-get install libopencv-dev 看看你的usr/share/opencv
-
opencv3/C++ FLANN特征匹配方式
使用函数detectAndCompute()检测关键点并计算描述符 函数detectAndCompute()参数说明: void detectAndCompute( InputArray image, //图像 InputArray mask, //掩模 CV_OUT std::vector<KeyPoint>& keypoints,//输出关键点的集合 OutputArray descriptors,//计算描述符(descriptors[i]是为keypoints[i]的计算描述符
-
opencv3/C++实现霍夫圆/直线检测
霍夫直线检测 参数说明: cv::HoughLinesP( InputArray src, // 输入图像(8位灰度图像) OutputArray lines, // 输出直线两点坐标(vector<Vec4i>) double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长(一般取CV_PI/180) int threshold, // 累加器阈值,获得足够交点的极坐标点才被看成是直线 double minLineLength=0;//
-
opencv3/C++ 使用Tracker实现简单目标跟踪
简介 MIL: TrackerMIL 以在线方式训练分类器将对象与背景分离;多实例学习避免鲁棒跟踪的漂移问题. OLB: TrackerBoosting 基于AdaBoost算法的在线实时对象跟踪.分类器在更新步骤中使用周围背景作为反例以避免漂移问题. MedianFlow: TrackerMedianFlow 跟踪器适用于非常平滑和可预测的运动,物体在整个序列中可见. TLD: TrackerTLD 将长期跟踪任务分解为跟踪,学习和检测.跟踪器在帧之间跟踪对象.探测器本地化所观察到的所有外观,
-
opencv3/C++ 实现SURF特征检测
SURF即Speeded Up Robust Features加速鲁棒特征: SURF可以用于对象定位和识别.人脸识别.3D重建.对象跟踪和提取兴趣点等. 工作原理: 1.选择图像中POI(Points of Interest) Hessian Matrix; 2.在不同的尺度空间发现关键点,非最大信号压制; 3.发现特征点方法.旋转不变性要求; 4.生成特征向量; 类SURF中成员函数create()参数说明: static Ptr<SURF> create( double hessianT
-
Python使用Opencv实现图像特征检测与匹配的方法
特征检测是计算机对一张图像中最为明显的特征进行识别检测并将其勾画出来.大多数特征检测都会涉及图像的角点.边和斑点的识别.或者是物体的对称轴. 角点检测 是由Opencv的cornerHarris函数实现,其他函数参数说明如下: cv2.cornerHarris(src=gray, blockSize=9, ksize=23, k=0.04) # cornerHarris参数: # src - 数据类型为 float32 的输入图像. # blockSize - 角点检测中要考虑的领域大小. #
-

OpenCV实现特征检测和特征匹配方法汇总
目录 1.SURF 2.SIFT 3.ORB 4.FAST 5.Harris角点 一幅图像中总存在着其独特的像素点,这些点我们可以认为就是这幅图像的特征,成为特征点.计算机视觉领域中的很重要的图像特征匹配就是一特征点为基础而进行的,所以,如何定义和找出一幅图像中的特征点就非常重要.这篇文章我总结了视觉领域最常用的几种特征点以及特征匹配的方法. 在计算机视觉领域,兴趣点(也称关键点或特征点)的概念已经得到了广泛的应用, 包括目标识别. 图像配准. 视觉跟踪. 三维重建等. 这个概念的原理是, 从图
-
详解opencv Python特征检测及K-最近邻匹配
鉴于即将启程旅行,先上传篇简单的图像检索介绍,与各位一起学习opencv的同学共勉 一.特征检测 图片的特征主要分为角点,斑点,边,脊向等,都是常用特征检测算法所检测到的图像特征· 1.Harris角点检测 先将图片转换为灰度模式,再使用以下函数检测图片的角点特征: dst=cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]]) 重点关注第三个参数,这里使用了Sobel算子,简单来说,其取为3-31间的奇数,定义了角点检测的
-
opencv3/C++ 平面对象识别&透视变换方式
findHomography( ) 函数findHomography( )找到两个平面之间的透视变换H. 参数说明: Mat findHomography( InputArray srcPoints, //原始平面中点的坐标 InputArray dstPoints, //目标平面中点的坐标 int method = 0, //用于计算单应性矩阵的方法 double ransacReprojThreshold = 3, OutputArray mask=noArray(), //通过鲁棒法(RA
-
浅析ORB、SURF、SIFT特征点提取方法以及ICP匹配方法
目录 main.cpp CMakeLists.txt 执行效果 ICP CMakeLists.txt 执行效果 在进行编译视觉SLAM时,书中提到了ORB.SURF.SIFT提取方法,以及特征提取方法暴力匹配(Brute-Force Matcher)和快速近邻匹配(FLANN).以及7.9讲述的3D-3D:迭代最近点(Iterative Closest Point,ICP)方法,ICP 的求解方式有两种:利用线性代数求解(主要是SVD),以及利用非线性优化方式求解. 完整代码代码如下: 链接:h
-
win10下vs2015配置Opencv3.1.0详细过程
才发现Opencv3.1.0已经发布了,刚好电脑重装系统就配置了一下,发现比Opencv2的配置过程更加简单,而且已经适配了vs2015. 下载安装Opencv3.1.0 1.下载Opencv3.1.0,进入官网,点击opencv for windows即可下载. 点击运行下载好的文件.实际上,opencv的安装程序就是解压缩文件,个人因为只有C盘,所以就直接在C盘建了一个文件夹Opencv3.1.0. 选好路径之后点击Extract即可. OpenCV3.1.0环境变量配置 选择此电脑(计算机
-
ubuntu14.04安装opencv3.0.0的操作方法
1.安装依赖项 直接编译安装opencv一般会报错,依赖工具需要先安装. $ sudo apt-get install build-essential cmake libopencv-dev libgtk2.0-dev pkg-config python-dev python-numpy 2.下载opencv3(两个版本任选其一) $ mkdir ~/opencv $ cd ~/opencv $ wget https://github.com/Itseez/opencv/archive/3.0.
-
Java+opencv3.2.0实现hough直线检测
hough变换是图像处理中的一种特征提取技术,该过程在一个参数空间中通过计算累计结果的局部最大值得到一个符合特定形状的集合作为hough变换结果. 发展史: 1962年由PaulHough首次提出,用来检测直线和曲线. 1972年由Richard Duda & Peter Hart推广使用,扩展到任意形状物体的识别. 原理: 一条直线在直角坐标系下的表示形式为y=k*x+b,而在极坐标系下表示为r=x*cos(theta)+y*sin(theta).hough变换的思想为在直角坐标系下的一个点对