OpenCV中findContours函数参数详解
注: 这篇文章用的OpenCV版本是2.4.10, 3以上的OpenCV版本相关函数可能有改动
Opencv中通过使用findContours函数,简单几个的步骤就可以检测出物体的轮廓,很方便。这些准备继续探讨一下findContours方法中各参数的含义及用法,比如要求只检测最外层轮廓该怎么办?contours里边的数据结构是怎样的?hierarchy到底是什么鬼?Point()有什么用?
先从findContours函数原型看起:
findContours( InputOutputArray image, OutputArrayOfArrays contours,
OutputArray hierarchy, int mode,
int method, Point offset=Point());
第一个参数:image,单通道图像矩阵,可以是灰度图,但更常用的是二值图像,一般是经过Canny、拉普拉斯等边缘检测算子处理过的二值图像;
第二个参数:contours,定义为“vector<vector<Point>> contours”,是一个向量,并且是一个双重向量,向量内每个元素保存了一组由连续的Point点构成的点的集合的向量,每一组Point点集就是一个轮廓。
有多少轮廓,向量contours就有多少元素。
第三个参数:hierarchy,定义为“vector<Vec4i> hierarchy”,先来看一下Vec4i的定义:
typedef Vec<int, 4> Vec4i;;
Vec4i是Vec<int,4>的别名,定义了一个“向量内每一个元素包含了4个int型变量”的向量。
所以从定义上看,hierarchy也是一个向量,向量内每个元素保存了一个包含4个int整型的数组。
向量hiararchy内的元素和轮廓向量contours内的元素是一一对应的,向量的容量相同。
hierarchy向量内每一个元素的4个int型变量——hierarchy[i][0] ~hierarchy[i][3],分别表示第i个轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号。如果当前轮廓没有对应的后一个轮廓、前一个轮廓、父轮廓或内嵌轮廓的话,则hierarchy[i][0] ~hierarchy[i][3]的相应位被设置为默认值-1。
第四个参数:int型的mode,定义轮廓的检索模式:
取值一:CV_RETR_EXTERNAL只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
取值二:CV_RETR_LIST 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,所以hierarchy向量内所有元素的第3、第4个分量都会被置为-1,具体下文会讲到
取值三:CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
取值四:CV_RETR_TREE, 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内层轮廓还可以继续包含内嵌轮廓。
第五个参数:int型的method,定义轮廓的近似方法:
取值一:CV_CHAIN_APPROX_NONE 保存物体边界上所有连续的轮廓点到contours向量内
取值二:CV_CHAIN_APPROX_SIMPLE 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours向量内,拐点与拐点之间直线段上的信息点不予保留
取值三和四:CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
第六个参数:Point偏移量,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加上该偏移量,并且Point还可以是负值!
下边用效果图对比一下findContours函数中各参数取不同值时,向量contours和hierarchy的内容如何变化,有何异同。
主体程序如下:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
#include "iostream"
using namespace std;
using namespace cv;
int main(int argc,char *argv[])
{
Mat imageSource=imread(argv[1],0);
imshow("Source Image",imageSource);
Mat image;
GaussianBlur(imageSource,image,Size(3,3),0);
Canny(image,image,100,250);
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(image,contours,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point());
Mat imageContours=Mat::zeros(image.size(),CV_8UC1);
Mat Contours=Mat::zeros(image.size(),CV_8UC1); //绘制
for(int i=0;i<contours.size();i++)
{
//contours[i]代表的是第i个轮廓,contours[i].size()代表的是第i个轮廓上所有的像素点数
for(int j=0;j<contours[i].size();j++)
{
//绘制出contours向量内所有的像素点
Point P=Point(contours[i][j].x,contours[i][j].y);
Contours.at<uchar>(P)=255;
}
//输出hierarchy向量内容
char ch[256];
sprintf(ch,"%d",i);
string str=ch;
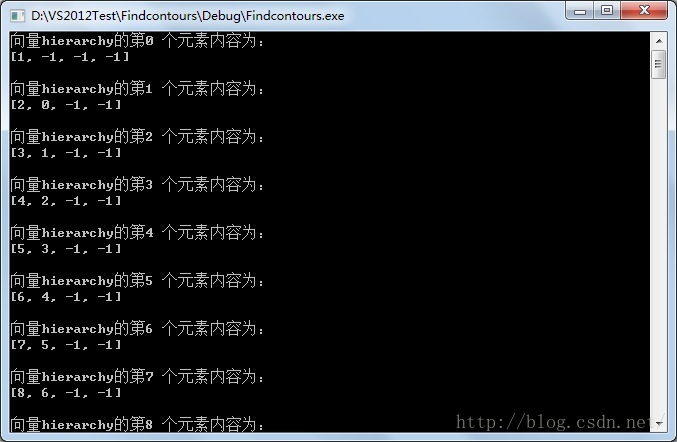
cout<<"向量hierarchy的第" <<str<<" 个元素内容为:"<<endl<<hierarchy[i]<<endl<<endl;
//绘制轮廓
drawContours(imageContours,contours,i,Scalar(255),1,8,hierarchy);
}
imshow("Contours Image",imageContours); //轮廓
imshow("Point of Contours",Contours); //向量contours内保存的所有轮廓点集
waitKey(0);
return 0;
}
程序中所用原始图像如下:

通过调整第四个参数mode——轮廓的检索模式、第五个参数method——轮廓的近似方式和不同的偏移量Point(),就可以得到以下效果。
一、mode取值“CV_RETR_EXTERNAL”
method取值“CV_CHAIN_APPROX_NONE”,即只检测最外层轮廓,并且保存轮廓上所有点:
轮廓:

只有最外层的轮廓被检测到,内层的轮廓被忽略
contours向量内所有点集:

保存了所有轮廓上的所有点,图像表现跟轮廓一致
hierarchy向量:

重温一下hierarchy向量————向量中每个元素的4个整形分别对应当前轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号。
本次参数配置下,hierarchy向量内有3个元素,分别对应于3个轮廓。以第2个轮廓(对应向量内第1个元素)为例,内容为[2,0,-1,-1], “2”表示当前轮廓的后一个轮廓的编号为2,“0”表示当前轮廓的前一个轮廓编号为0,其后2个“-1”表示为空,因为只有最外层轮廓这一个等级,所以不存在父轮廓和内嵌轮廓。
二、 mode取值“CV_RETR_LIST”
method取值“CV_CHAIN_APPROX_SIMPLE”,即检测所有轮廓,但各轮廓之间彼此独立,不建立等级关系,并且仅保存轮廓上拐点信息:
检测到的轮廓跟上文“一”中是一致的,不再显示。
contours向量内所有点集:

contours向量中所有的拐点信息得到了保留,但是拐点与拐点之间直线段的部分省略掉了。
hierarchy向量(截取一部分):
本次参数配置下,检测出了较多轮廓。第1、第2个整形值分别指向上一个和下一个轮廓编号,由于本次配置mode取
值“RETR_LIST”,各轮廓间各自独立,不建立等级关系,所以第3、第4个整形参数为空,设为值-1。
三、mode取值“CV_RETR_TREE”
method取值“CV_CHAIN_APPROX_NONE”,即检测所有轮廓,轮廓间建立外层、内层的等级关系,并且保存轮廓上所有点。
contours向量内所有点集:

所有内外层轮廓都被检测到,contours点集组成的图形跟轮廓表现一致。
hierarchy向量(截取一部分)

本次参数配置要求检测所有轮廓,每个轮廓都被划分等级,最外围、第一内围、第二内围等等,所以除第1个最后一个轮廓外,其他轮廓都具有不为-1的第3、第4个整形参数,分别指向当前轮廓的父轮廓、内嵌轮廓索引编号。
四、Point()偏移量设置
使用三中的参数配置,设置偏移量Point为Point(45,30)。
此时轮廓图像为:

可以看到轮廓图像整体向右下角有一个偏转,偏转量就是设置的(45,30)。
这个偏移量的设置不能过大或过小(负方向上的过小),若图像上任一点加上该偏移量后超出图像边界,程序会内存溢出报错。
findContours函数的各参数就探讨到此,其他参数配置的情况大同小异。值得关注一下的是绘制轮廓的函数drawContours中最后一个参数是一个Point类型的offset,这个offset跟findContours函数中的offset含义一致,设置之后所绘制的轮廓是原始轮廓上所有像素点加上该偏移量offset后的效果。
当所分析图像是另外一个图像的ROI的时候,这个offset偏移量就可以大显身手了。通过加减这个偏移量,就可以把ROI图像的检测结果投影到原始图像对应位置上。
到此这篇关于OpenCV中findContours函数参数详解的文章就介绍到这了,更多相关OpenCV findContours内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
浅谈opencv自动光学检测、目标分割和检测(连通区域和findContours)
步骤如下: 1.图片灰化: 2.中值滤波 去噪 3.求图片的光影(自动光学检测) 4.除法去光影 5.阈值操作 6.实现了三种目标检测方法 主要分两种连通区域和findContours 过程遇到了错误主要是图片忘了灰化处理,随机颜色的问题.下面代码都已经进行了解决 这是findContours的效果 下面是连通区域的结果 #include <opencv2\core\utility.hpp> #include <opencv2\imgproc.hpp> #include <o
-
Python通过OpenCV的findContours获取轮廓并切割实例
1 获取轮廓 OpenCV2获取轮廓主要是用cv2.findContours import numpy as np import cv2 im = cv2.imread('test.jpg') imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) ret,thresh = cv2.threshold(imgray,127,255,0) image, contours, hierarchy = cv2.findContours(thresh,cv2.RETR_T
-

OpenCV中findContours函数参数详解
注: 这篇文章用的OpenCV版本是2.4.10, 3以上的OpenCV版本相关函数可能有改动 Opencv中通过使用findContours函数,简单几个的步骤就可以检测出物体的轮廓,很方便.这些准备继续探讨一下findContours方法中各参数的含义及用法,比如要求只检测最外层轮廓该怎么办?contours里边的数据结构是怎样的?hierarchy到底是什么鬼?Point()有什么用? 先从findContours函数原型看起: findContours( InputOutputArray
-
Linux 在Shell脚本中使用函数实例详解
Linux 在Shell脚本中使用函数实例详解 Shell的函数 Shell程序也支持函数.函数能完成一特定的功能,可以重复调用这个函数. 函数格式如下: 函数名() { 函数体 } 函数调用方式: 函数名 参数列表 实例:编写一函数add求两个数的和,这两个数用位置参数传入,最后输出结果. root@ubuntu:/home/study# vi test3 #!/bin/bash add(){ a=$1; b=$2; z=`expr $a + $b`; echo "The sum is $z&
-
JavaScript中eval()函数用法详解
eval() 函数计算 JavaScript 字符串,并把它作为脚本代码来执行. 如果参数是一个表达式,eval() 函数将执行表达式.如果参数是Javascript语句,eval()将执行 Javascript 语句. 语法 复制代码 代码如下: eval(string) 参数 描述 string 必需.要计算的字符串,其中含有要计算的 JavaScript 表达式或要执行的语句. eval()函数用法详解: 此函数可能使用的频率并不是太高,但是在某些情况下具有很大的作用,下面就介绍一下eva
-
Jquery中$.ajax()方法参数详解
俗说好记性不如个烂笔头,下面是jquery中的ajax方法参数详解,这里整理了一些供大家参考. 1.url: 要求为String类型的参数,(默认为当前页地址)发送请求的地址. 2.type: 要求为String类型的参数,请求方式(post或get)默认为get.注意其他http请求方法,例如put和delete也可以使用,但仅部分浏览器支持. 3.timeout: 要求为Number类型的参数,设置请求超时时间(毫秒).此设置将覆盖$.ajaxSetup()方法的全局设置. 4.async:
-
js匿名函数作为函数参数详解
由衷的感叹,js真是烦. 学到现在,渐渐理解了什么是:语言都是通用的,没有好不好,只有擅长不擅长. 继承,多态,甚至指针,c能实现,c++,java有,javascript(和java是雷锋和雷峰塔的区别,名字上不知道坑了多少人)也能变通实现. 温故知新,今天又回味了一遍,匿名函数作为函数参数. 代码很短,五脏俱全. <!DOCTYPE html> <html lang="en"> <head> </head> <body>
-
Python 带星号(* 或 **)的函数参数详解
1. 带默认值的参数 在了解带星号(*)的参数之前,先看下带有默认值的参数,函数定义如下: >> def defaultValueArgs(common, defaultStr = "default", defaultNum = 0): print("Common args", common) print("Default String", defaultStr) print("Default Number", d
-
C语言sizeof与字符串处理与动态内存分配及main函数参数详解
目录 常用的字符串处理函数(标准库里面的) sizeof 求字节运算符 动态内存分配函数 main的参数问题 常用的字符串处理函数(标准库里面的) strlen : 用来求一个字符串的长度 #include <string.h> size_t strlen(const char *s); @s : 指向要计算的那个字符串的首地址 “const char *” : 表示在函数调用过程中,
-
Webpack中SplitChunksPlugin 配置参数详解
代码分割本身和 webpack 没有什么关系,但是由于使用 webpack 可以非常轻松地实现代码分割,所以提到代码分割首先就会想到使用 webopack 实现. 在 webpack 中是使用 SplitChunksPlugin 来实现的,由于 SplitChunksPlugin 配置参数众多,接下来就来梳理一下这些配置参数. 官网上的默认配置参数如下: module.exports = { //... optimization: { splitChunks: { chunks: 'async'
-
calendar在python3时间中常用函数举例详解
想要在python中写代码游刃有余,没有函数的支持是万万不行的.很多小伙伴反映,最近函数的应用知识不够了,所以小编挑选了python3时间中的函数,希望可以帮助大家在处理日历方面更加的迅速.其他更多的函数,大家也可以自行去搜集一点资料学习,小编就讲几个最简单的吧. 1.firstweekday() firstweekday(): 返回当前每周起始日期值.默认情况下,首次载入calendar模块时返回0,即星期一 import calendar # 0 print(calendar.firstwe
-
C++头文件algorithm中的函数功能详解
目录 1. 不修改内容的序列操作 (1)all_of (2)any_of (3)none_of (6)find_if (7)find_if_not (8)find_end (10)adjacent_find (12)count_if (15)is_permutation (16)search 2. 修改内容的序列操作 (1)copy (2)copy_n (3)copy_if (4)copy_backward (5)move (6)move_backward (7)swap (8)swap_ran