Win10 系统下VisualStudio2019 配置点云库 PCL1.11.0的图文教程
一、下载PCL1.11.0
Github下载地址:https://github.com/PointCloudLibrary/pcl/releases
下载红框内的两个文件

二、安装PCL1.11.0
2.1 安装“PCL-1.11.0-AllInOne-msvc2019-win64.exe”。
(1)选择第二个,自动添加系统变量

(2)安装路径选择D盘,系统会自动新建PCL 1.11.0文件夹。

2.2 安装完成之后打开文件夹 D:\PCL 1.11.0\3rdParty\OpenNI2
双击OpenNI-Windows-x64-2.2 选择路径(D:\PCL 1.11.0\3rdParty\OpenNI2)安装即可。

2.3 全部安装完成后,将pcl-1.11.0-pdb-msvc2019-win64.zip解压后的.pdb文件拷贝到(D:\PCL 1.11.0\bin)中。
2.4 设置环境变量:右击计算机—属性—高级系统设置—高级—环境变量—用户变量—Path—编辑!

如下图所示,设置完成后重启电脑。

在这里直接给出,防止出现错误(依次添加):
%PCL_ROOT%\3rdParty\FLANN\bin
%PCL_ROOT%\3rdParty\VTK\bin
%OPENNI2_REDIST64%
%OPENNI2_LIB64%
%OPENNI2_INCLUDE64%
到此,环境变量的配置完成。
三、VS2019相关设置
3.1 新建空项目

解决方案配置选择Debug,解决方案平台选择x64。

3.2 新建一个C++源文件

3.3 右击新建的项目—属性:打开属性表

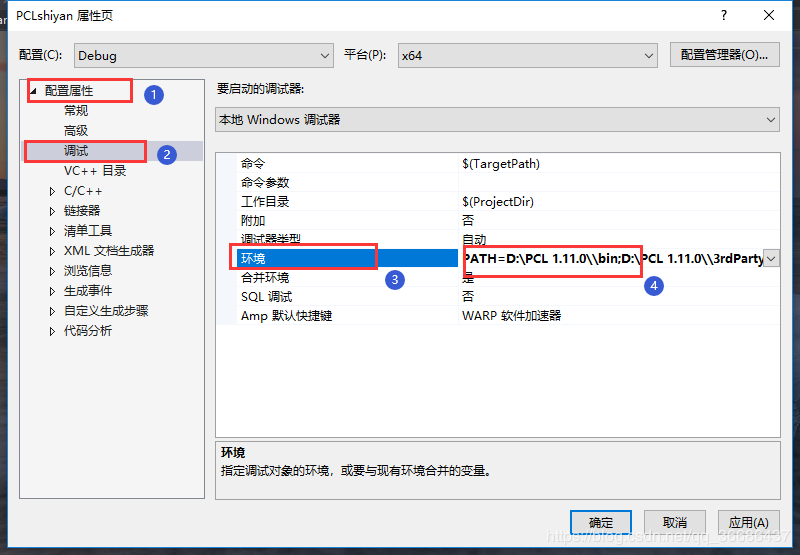
3.4 配置属性—调试—环境—添加:
PATH=D:\PCL 1.11.0\\bin;D:\PCL 1.11.0\\3rdParty\FLANN\bin;D:\PCL 1.11.0\\3rdParty\VTK\bin;D:\PCL 1.11.0\\3rdParty\OpenNI2\Tools
3.5 C/C++—语言—符合模式:否

3.6 C/C++—常规—SDL检查:否

四、配置PCL1.11.0
为了使用方便,这里使用添加属性表的形式
4.1 视图—其他窗口—属性管理器

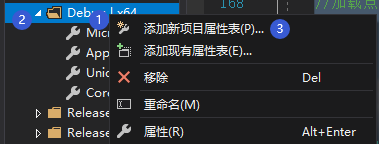
4.2 打开属性管理器之后,选择Debug|X64—单击Debug|X64左侧倒三角—右击选择 添加型项目属性表
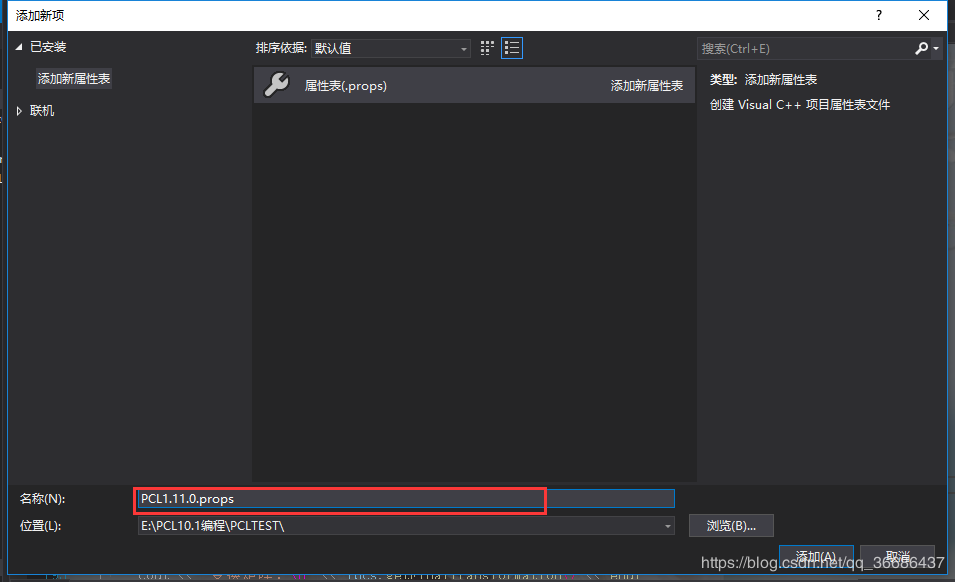
4.3 项目属性表命名
4.4 双击新添加的属性表—VC++目录—包含目录,添加7个include路径

具体添加的include路径如下:
D:\PCL 1.11.0\include\pcl-1.11
D:\PCL 1.11.0\3rdParty\Boost\include\boost-1_73
D:\PCL 1.11.0\3rdParty\Eigen\eigen3
D:\PCL 1.11.0\3rdParty\FLANN\include
D:\PCL 1.11.0\3rdParty\Qhull\include
D:\PCL 1.11.0\3rdParty\VTK\include\vtk-8.2
D:\PCL 1.11.0\3rdParty\OpenNI2\Include
4.5 VC++目录—包含目录,添加6个lib路径

具体添加的lib路径如下:
D:\PCL 1.11.0\lib
D:\PCL 1.11.0\3rdParty\Boost\lib
D:\PCL 1.11.0\3rdParty\FLANN\lib
D:\PCL 1.11.0\3rdParty\Qhull\lib
D:\PCL 1.11.0\3rdParty\OpenNI2\Lib
D:\PCL 1.11.0\3rdParty\VTK\lib

4.6 C/C++—预处理器—预处理器定义—添加:
BOOST_USE_WINDOWS_H
NOMINMAX
_CRT_SECURE_NO_DEPRECATE

4.7 链接器—输入—附加依赖项——添加PCL和VTK的相关lib文件。我用的Debug版本。

附加依赖项具体添加内容如下:(内容略多,放在PCL1.11.0附加依赖项里边了。文章末尾 附录中 给出批量获取附加依赖项的方法)
输入到属性表里边的时候必须一行对应一个lib才能成功。
Debug版本
4.8保存属性表

下一次需要创建新项目的时候,只需进行第三步 VS2019相关设置 的操作,然后打开属性管理器,添加现有属性表,找到之前保存的属性表添加进去即可。


五、测试代码
#include <iostream>
#include <vector>
#include <ctime>
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std;
int
main(int argc, char** argv)
{
srand((unsigned int)time(NULL));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// 创建点云数据
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(0.1);
octree.setInputCloud(cloud);
octree.addPointsFromInputCloud();
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
//半径内近邻搜索
vector<int>pointIdxRadiusSearch;
vector<float>pointRadiusSquaredDistance;
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << endl;
}
// 初始化点云可视化对象
boost::shared_ptr<pcl::visualization::PCLVisualizer>viewer(new pcl::visualization::PCLVisualizer("显示点云"));
viewer->setBackgroundColor(0, 0, 0); //设置背景颜色为黑色
// 对点云着色可视化 (red).
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>target_color(cloud, 255, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, target_color, "target cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "target cloud");
// 等待直到可视化窗口关闭
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(1000));
}
return (0);
}
输出下图(数字可能不同),则表示安装成功!

六、附录—获取自己的链接库列表
win+r调出“运行”窗口并输出cmd
输入:cd /d D:\PCL 1.11.0\3rdParty\VTK\lib 回车 (填自己的路径)
输入:dir /b *.lib *>0.txt 回车

这时打开你对应路劲的目录,多了一个0.txt文件,里面存了你这个文件夹里所有链接库名字。
由于每一个Debug版本和Release版本的链接库是挨在一起的。写一个读取文档并对其分别保存就行了。
具体代码如下:(主要功能是读取一个txt文件,将其中奇数行和偶数行单独输出到新的txt文档。)
#include <iostream>
#include <string>
#include <fstream>
#include <iostream>
using namespace std;
int main()
{
ifstream txtfile;//打开读取的文件
ofstream txt01;//保存的文件
ofstream txt02;//保存的文件
string temp;
int index = 0;//用于判断奇偶
txtfile.open("0.txt", ios::in);
while (!txtfile.eof()) // 若未到文件结束一直循环
{
getline(txtfile, temp);//一行一行读取
if (index%2==0)//判断除以2的余数,即为奇偶的判断
{
txt01.open("1.txt", ios::app);
txt01 << temp;
txt01 << endl;
txt01.close();
}
else
{
txt02.open("2.txt", ios::app);
txt02 << temp;
txt02 << endl;
txt02.close();
}
index++;
}
txtfile.close(); //关闭文件
txtfile.close();
txt01.close();
txt02.close();
return 0;
}
到此这篇关于Win10 系统下VisualStudio2019 配置点云库 PCL1.11.0的图文教程的文章就介绍到这了,更多相关VisualStudio2019 配置点云库 PCL1.11.0内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-
使用Visual Studio2019创建C#项目(窗体应用程序、控制台应用程序、Web应用程序)
一.VS的开发环境 首先你得安装了vs2019,然后确认下下面三个组件是否存在,如果没有要下载一下.vs2019的安装可参考visual studio2019的安装以及使用. 二.创建C#窗体应用程序 打开vs 可以直接在搜索框输入关键字进行搜索,选择 Windows 窗体应用(.NET Framework).如图. 也可以限定项目类型,所用的语言进行查找. 接下去狂点确定即可.当然可以选择改个项目存放存放的目录和项目名称. 创建好后,就进入到了这么一个界面. 在窗体右边(也可能是在左边.每个人
-
大早上更新了Visual Studio 2019 试用一下
一.界面改变 1.项目创建界面 首先启动界面改变就不说了,创建项目的界面做了较大改变,感觉在向vs for mac 靠拢 ,而后者感觉像xcode.. 2.菜单 2019 2017 2019将解决方案名放到了菜单右边, 比2017少了顶部一条,敲代码的空间更大了一点,但感觉菜单太靠近顶部了,有点压抑有木有 二.参照帮助文档看看新功能 1.代码清理.修复 编辑器下面多了个小刷子,下拉选项中选择配置 可以选择多个累加到默认配置中,点击小刷子或者按ctrl+K,ctrl+E自动执行设置的多个修复项.
-
Visual Studio 2019 使用 Live Share的教程图解
推荐阅读: 大早上更新了Visual Studio 2019 试用一下 一.前言 Visual Studio 2019 在今天发布(北京时间)了,这次带来了一个比较有趣的 Live Share 功能,使用它可以进行更好的协作开发.主要功能: 更多资料可看官方介绍: •Visual Studio 实时共享 •什么是Visual Studio Live Share? 二.Visual Studio Code 注意事项 Live Share 可以在 Visual Studio 2019 和 Visua
-

visual studio 2019正式版安装简单教程
visual studio 2019 2019年4月2日发布正式版今天终于有时间了在机器上安装了体验了一下,环境WIN10企业版固态硬盘+机械硬盘,原来安装有visual studio 2017 废话不说,直接上截图 由于考虑到空间问题还是安装在了机械硬盘下,肯定没有固态启动速度快影响效率. 下载速度还可以吧电信50M宽带,大约下载和安装40分钟左右,安装选择上我也没有全部安装,只安装了LINUX C++ NETCORE ASP.NET WEB 开发 NODEJS开发等 经过等待一段时间后安装完
-
详解Visual Studio 2019(VS2019) 基本操作
卸载/加载项目 1.卸载项目:不删除项目代码,但是停止对该项目的一切使用和调用(好处是保留代码) 2.加载项目:重新加载已停用的项目,可以继续使用和调用 修改VS主题风格 工具–>选项–>环境–>常规 修改字体 工具–>选项–>环境–>字体和颜色 设置程序启动项 右键解决方案–>选择属性(VS默认是单启动项) 快速创建属性 光标要在[字段]附近 快捷键:[Ctrl+r+e](按住Crtl,先按r,再按e) 直接回车就可以 VS常用快捷键 代码对齐:Ctrl+k+d
-
Win10 系统下VisualStudio2019 配置点云库 PCL1.11.0的图文教程
一.下载PCL1.11.0 Github下载地址:https://github.com/PointCloudLibrary/pcl/releases 下载红框内的两个文件 二.安装PCL1.11.0 2.1 安装"PCL-1.11.0-AllInOne-msvc2019-win64.exe". (1)选择第二个,自动添加系统变量 (2)安装路径选择D盘,系统会自动新建PCL 1.11.0文件夹. 2.2 安装完成之后打开文件夹 D:\PCL 1.11.0\3rdParty\OpenNI
-
win10系统下 VS2019点云库PCL1.12.0的安装与配置教程
PCL简介:点云库全称是Point Cloud Library(PCL),是一个独立的.大规模的.开放的2D/3D图像和点云处理项目.PCL根据BSD许可条款发布的,是可以免费用于商用和研究使用. PCL相关网站: PCL官网.项目GitHub 项目开发需要用到PCL,下面记录一下我的PCL安装和配置过程. 参考博文:pcl1.8.0+vs2013环境配置(详细 1. 版本信息 win10系统 PCL:我安装的是PCL 1.12.0,需要下载两个文件: 下载地址: Releases · Poin
-
win10系统VS2019配置点云库PCL1.12.1的详细流程
目录 0 写在最前 1 PCL的下载安装 1.1 PCL下载 1.2 PCL安装 1.3 bin文件拷贝 1.4 其他问题 2 在VS中配置PCL 2.1 前期工作 2.1 添加包含目录 2.2 添加库目录 2.3 添加依赖项 3 PCL运行验证 4 写在最后 0 写在最前 这是本人昨天在VS2019上配置PCL点云库的一些基本流程以及一些问题的总结,有些问题我的解决办法不一定是最优的,仅供大家参考,当然这里也记录了我这个小白在配置过程中踩过的一些小坑,希望能为大家带来方便. 本文参考博文:ht
-
win10系统下python3安装及pip换源和使用教程
一.python3的安装 建议安装python3,python2在未来将不再维护. python官方下载地址 https://www.python.org/downloads/windows/ 选择 executable installer ,根据自己系统选择64位还是32位的安装包. 下载完成后双击运行 勾选Add Python 3.7 to PATH,方便在cmd命令行中调用,然后选择Customize installation. pip必选,其他根据自己的情况选择,无Pycharm等pyt
-
Win10系统下安装labelme及json文件批量转化方法
一.安装环境:windows10,anaconda3,python3.6 由于框架maskrcnn需要json数据集,在没安装labelme环境和跑深度学习之前,我安装的是anaconda3,其中pyhton是3.7版本的,经网上查阅资料,经过一番查找资料,发现,原来在2019年,TensorFlow还不支持python3.7,所以,迫于无奈,我只能乖乖把python的版本退回到3.6版本,具体步骤也很简单.就是打开anaconda prompt ,然后输入conda install pytho
-
win10系统下安装superset的步骤
superset是一个轻量级自助式BI框架,以优雅的界面和根据数据表动态生成数据为主要特点. 一. 环境 windows 10 64位 Python 3.7 二. 安装步骤 安装Python 建议安装Python 3.7 版本,Python官网:https://www.python.org/downloads/release/python-373/ 下载64位Python下载 python-3.7.3-amd64.exe,直接使用exe的安装包即可,安装过程中选中增加到环境变量. 安装VS201
-
在win10系统下安装Mysql 5.7.17图文教程
操作系统win10 MySQL为官网下载的64位zip解压缩Community版本. 因为想要在公司电脑上安装Mysql,于是到官网上下载了最新版本的Mysql-5.7.17,首先通过网上教程进行安装,解压,然后在C盘新建了一个Mysql0104目录(作为Mysql的安装目录),将解压过后Mysql-5.7.17文件夹中的内容拷贝至安装目录Mysql中. 文件内容如下: 之后按照网上攻略:以管理员身份运行命令行窗口,mysqld -install 安装mysql:这一步理论不会有什么问题 正常
-
Win10系统下MySQL8.0.16 压缩版下载与安装教程图解
官网下载: https://www.mysql.com 进入MySQL官网,选择download 选择社区 选择MySQL 社区 服务器 点击download下载 点击最下面不登陆下载 下载完成是这样一个压缩包 安装 解压文件 将bin文件的目录加入电脑系统环境配置path下 新建my.ini配置文件 [mysql] default-character-set = utf8 [mysqld] #端口 port = 3306 #mysql安装目录 basedir = E:/mysql-8.0.16
-
Win10 系统下快速搭建mxnet框架cpu版本
Win10 系统下快速搭建mxnet框架cpu版本 一:安装Anaconda 1. 从官方网站下载 https://www.anaconda.com/download/ 建议下载python 3.7版本的Anaconda 2. 安装完成Anaconda后进行环境变量的测试(全程在cmd中完成) (1)检测anaconda环境是否安装成功: 运行cmd conda --version (2)安装一个内置的python版本解析器 conda search --full -name python #查
-
Win10系统下配置Java环境变量
1.JAVA_HOME 安装jdk的目录: 我安装JDK的目录:D:\APP\Java\jdk1.8.0_291 此电脑(右键)-> 属性 ->高级系统设置 -> 环境变量,在系统变量中新建 变量名:JAVA_HOME 变量值:D:\APP\Java\jdk1.8.0_291 2.JAVA_HOME/bin 此电脑(右键)-> 属性 ->高级系统设置 -> 环境变量,在系统变量中编辑Path 新建:%JAVA_HOME%\bin 添加环境变量完毕后在dos命令行中任何目