如何建立一个超图详解
1.图和超图
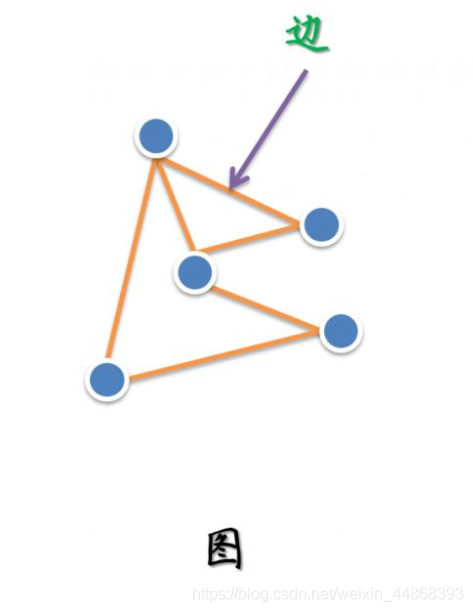
图作为一种数据结构,由节点和边组成,可由下图表示。其中一个边只能链接两个节点。一个图可表示为G=(v,e,w)
其中v表示节点,e表示边,w表示节点的特征。关于图的表示可参考,本文不再详述。
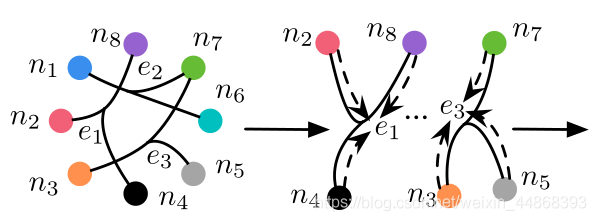
对于超图,其与图结构最主要的区别就是一条边可以连接多个节点,因此我们可以认为图是一种特殊的超图。超图结构如下图所示。
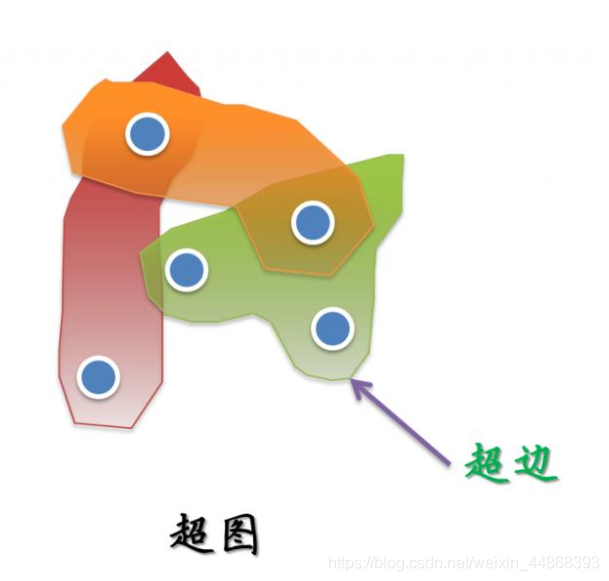
超图可表示为G=(υ,ε,ω)。其中υ为节点集合,ε为超边集合,ω为超边权重的对称矩阵。超图G可以关联矩阵H来表示,其词条定义为:
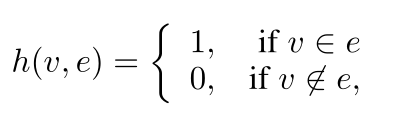
改公式可解释为如果某个节点属于某个超边,则关联矩阵H的值为1,否则为0。
对于单个节点v可定义为:

可解释为连接该节点的所有边乘上权重向量的和。
Dₑ和Dᵥ由d(v)和s(e)分别表示为超边和节点的对角矩阵。
单个边可定义为:

可以理解为该边包含的所有节点之和。
2.实例
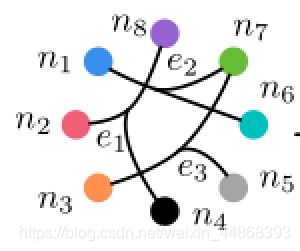
下面举出一个具体实例帮助理解超图的构建。以该图为例
图中有8个节点,3个超边。超边的细化图如下:
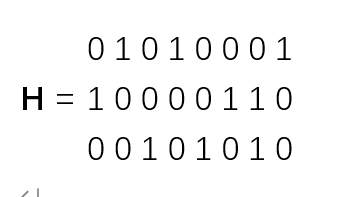
假设权重&W&为全1矩阵,因为它对构建超图数据结果无影响,那么H为一个3行8列的矩阵,表示为:
h(1,1) = 0
h(2,1) = 1
h(3,1) = 0
h(4,1) = 1
h(5,1) = 0
h(6,1) = 0
h(7,1) = 0
h(8,1) = 1
h(1,2) = 1
h(2,2) = 0
h(3,2) = 0
h(4,2) = 0
h(5,2) = 0
h(6,2) = 1
h(7,2) = 1
h(8,2) = 0
h(1,3) = 0
h(2,3) = 0
h(3,3) = 1
h(4,3) = 0
h(5,3) = 1
h(6,3) = 0
h(7,3) = 1
h(8,3) = 0
De表示为:
d(1) = 1
d(2) = 1
d(3) = 1
d(4) = 1
d(5) = 1
d(6) = 1
d(7) = 2
d(8) = 1
Dv表示为:
s(1) = 3
s(2) = 3
s(3) = 3
3.代码实现
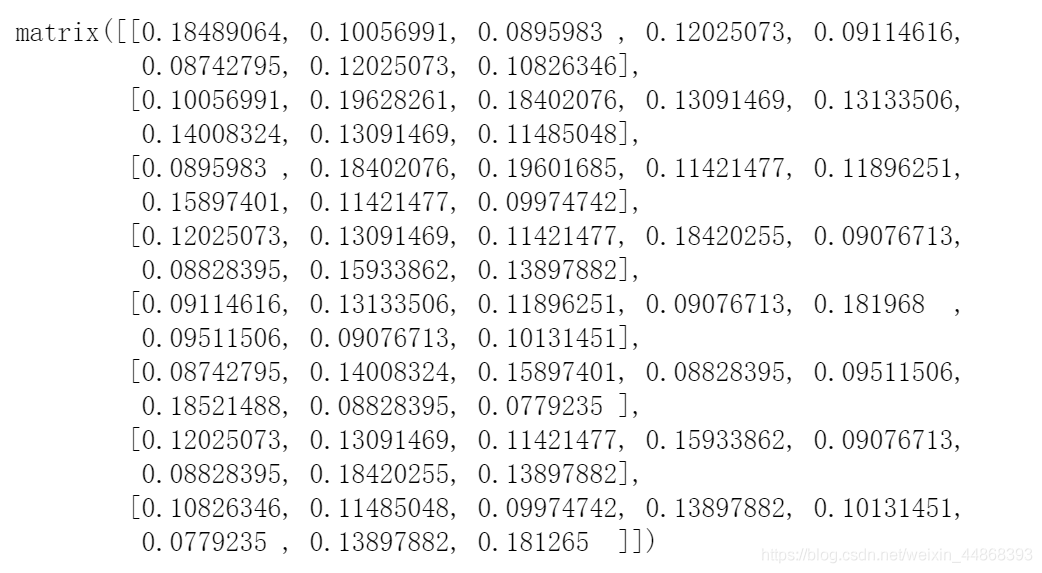
下面我们用python代码进行编程,我们的目标是在知道节点的特征W通过特征的距离来生成 G \mathcal{G} G矩阵。路线为:W,H, G \mathcal{G} G。主要代码如下:
import numpy as np
#KNN生成H
x = np.array([[1,0,0,0,1,0,1,0,0,0],
[1,1,1,0,0,0,1,1,1,0],
[1,1,1,0,0,1,1,1,1,0],
[0,1,0,0,0,0,1,0,1,0],
[1,1,1,1,0,0,1,1,0,1],
[1,0,1,0,0,1,0,1,1,0],
[0,1,0,0,1,0,1,1,1,0],
[0,1,1,0,1,0,1,0,1,1]])
def Eu_dis(x):
"""
Calculate the distance among each raw of x
:param x: N X D
N: the object number
D: Dimension of the feature
:return: N X N distance matrix
"""
x = np.mat(x)
aa = np.sum(np.multiply(x, x), 1)
ab = x * x.T
dist_mat = aa + aa.T - 2 * ab
dist_mat[dist_mat < 0] = 0
dist_mat = np.sqrt(dist_mat)
dist_mat = np.maximum(dist_mat, dist_mat.T)
return dist_mat
def hyperedge_concat(*H_list):
"""
Concatenate hyperedge group in H_list
:param H_list: Hyperedge groups which contain two or more hypergraph incidence matrix
:return: Fused hypergraph incidence matrix
"""
H = None
for h in H_list:
if h is not None and h != []:
# for the first H appended to fused hypergraph incidence matrix
if H is None:
H = h
else:
if type(h) != list:
H = np.hstack((H, h))
else:
tmp = []
for a, b in zip(H, h):
tmp.append(np.hstack((a, b)))
H = tmp
return H
def construct_H_with_KNN_from_distance(dis_mat, k_neig, is_probH=True, m_prob=1):
"""
construct hypregraph incidence matrix from hypergraph node distance matrix
:param dis_mat: node distance matrix
:param k_neig: K nearest neighbor
:param is_probH: prob Vertex-Edge matrix or binary
:param m_prob: prob
:return: N_object X N_hyperedge
"""
n_obj = dis_mat.shape[0]
# construct hyperedge from the central feature space of each node
n_edge = n_obj
H = np.zeros((n_obj, n_edge))
for center_idx in range(n_obj):
dis_mat[center_idx, center_idx] = 0
dis_vec = dis_mat[center_idx]
nearest_idx = np.array(np.argsort(dis_vec)).squeeze()
avg_dis = np.average(dis_vec)
if not np.any(nearest_idx[:k_neig] == center_idx):
nearest_idx[k_neig - 1] = center_idx
for node_idx in nearest_idx[:k_neig]:
if is_probH:
H[node_idx, center_idx] = np.exp(-dis_vec[0, node_idx] ** 2 / (m_prob * avg_dis) ** 2)
else:
H[node_idx, center_idx] = 1.0
return H
def construct_H_with_KNN(X, K_neigs=[10], split_diff_scale=False, is_probH=True, m_prob=1):
"""
init multi-scale hypergraph Vertex-Edge matrix from original node feature matrix
:param X: N_object x feature_number
:param K_neigs: the number of neighbor expansion
:param split_diff_scale: whether split hyperedge group at different neighbor scale
:param is_probH: prob Vertex-Edge matrix or binary
:param m_prob: prob
:return: N_object x N_hyperedge
"""
if len(X.shape) != 2:
X = X.reshape(-1, X.shape[-1])
if type(K_neigs) == int:
K_neigs = [K_neigs]
dis_mat = Eu_dis(X)
H = []
for k_neig in K_neigs:
H_tmp = construct_H_with_KNN_from_distance(dis_mat, k_neig, is_probH, m_prob)
if not split_diff_scale:
H = hyperedge_concat(H, H_tmp)
else:
H.append(H_tmp)
return H
H = construct_H_with_KNN(x)
#生成G
def generate_G_from_H(H, variable_weight=False):
"""
calculate G from hypgraph incidence matrix H
:param H: hypergraph incidence matrix H
:param variable_weight: whether the weight of hyperedge is variable
:return: G
"""
if type(H) != list:
return _generate_G_from_H(H, variable_weight)
else:
G = []
for sub_H in H:
G.append(generate_G_from_H(sub_H, variable_weight))
return G
def _generate_G_from_H(H, variable_weight=False):
"""
calculate G from hypgraph incidence matrix H
:param H: hypergraph incidence matrix H
:param variable_weight: whether the weight of hyperedge is variable
:return: G
"""
H = np.array(H)
n_edge = H.shape[1]
# the weight of the hyperedge
W = np.ones(n_edge)
# the degree of the node
DV = np.sum(H * W, axis=1)
# the degree of the hyperedge
DE = np.sum(H, axis=0)
invDE = np.mat(np.diag(np.power(DE, -1)))
DV2 = np.mat(np.diag(np.power(DV, -0.5)))
W = np.mat(np.diag(W))
H = np.mat(H)
HT = H.T
if variable_weight:
DV2_H = DV2 * H
invDE_HT_DV2 = invDE * HT * DV2
return DV2_H, W, invDE_HT_DV2
else:
G = DV2 * H * W * invDE * HT * DV2
return G
G = generate_G_from_H(H)
实验结果:
H

G
到此这篇关于如何建立一个超图的文章就介绍到这了,希望对你有帮助,更多相关超图内容请搜索我们以前的文章或继续浏览下面的相关文章,希望大家以后多多支持我们!
相关推荐
-
解决python图像处理图像赋值后变为白色的问题
用Python进行图像赋值,在1RGB基础上,加入光流两个通道,代码如下所示: import numpy as np import cv2 import matplotlib.pyplot as plt path = 'frame_00003_rgb.png' img = cv2.imread(path) img1 = np.zeros([480, 640, 5]) img1[:, :, 0:3] = np.array(img) cv2.imshow('test1', np.array(img)
-
Python+OpenCV图像处理——实现轮廓发现
简介:轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果. 代码如下: import cv2 as cv import numpy as np def contours_demo(image): dst = cv.GaussianBlur(image, (3, 3), 0) #高斯模糊去噪 gray = cv.cvtColor(dst, cv.COLOR_RGB2GRAY) ret, binary = cv.threshold(gray, 0, 25
-

python opencv图像处理(素描、怀旧、光照、流年、滤镜 原理及实现)
图像素描特效 图像素描特效主要经过以下几个步骤: 调用cv.cvtColor()函数将彩色图像灰度化处理: 通过cv.GaussianBlur()函数实现高斯滤波降噪: 边缘检测采用Canny算子实现: 最后通过cv.threshold()反二进制阈值化处理实现素描特效. #coding:utf-8 import cv2 as cv import numpy as np #读取原始图像 img = cv.imread('d:/paojie.png') #图像灰度处理 gray = cv.cvtC
-
基于python的opencv图像处理实现对斑马线的检测示例
基本思路 斑马线检测通过opencv图像处理来进行灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀后对图像进行轮廓检测,通过判断车辆和行人的位置,以及他们之间的距离信息,当车速到超过一定阈值时并且与行人距离较近时,则会被判定车辆为未礼让行人. 结果示例 实验流程 先通过视频截取一张图片来进行测试,如果结果满意之后再嵌套到视频中,从而达到想要的效果. 1.预处理(灰度值转换.高斯滤波去噪.阈值处理.腐蚀和膨胀)> 根据自己的需求来修改一些值 #灰度值转换 imgGray = cv2.cvtColor
-
如何建立一个超图详解
1.图和超图 图作为一种数据结构,由节点和边组成,可由下图表示.其中一个边只能链接两个节点.一个图可表示为G=(v,e,w) 其中v表示节点,e表示边,w表示节点的特征.关于图的表示可参考,本文不再详述. 对于超图,其与图结构最主要的区别就是一条边可以连接多个节点,因此我们可以认为图是一种特殊的超图.超图结构如下图所示. 超图可表示为G=(υ,ε,ω).其中υ为节点集合,ε为超边集合,ω为超边权重的对称矩阵.超图G可以关联矩阵H来表示,其词条定义为: 改公式可解释为如果某个节点属于某个超边,则关
-
C++中对象的动态建立与释放详解及其作用介绍
目录 概述 对象的动态的建立和释放 案例 对象数组 vs 指针数组 对象数组 指针数组 概述 通过对象的动态建立和释放, 我们可以提高内存空间的利用率. 对象的动态的建立和释放 new 运算符: 动态地分配内存 delete 运算符: 释放内存 当我们用new运算符动态地分配内存后, 将返回一个指向新对象的指针的值. 我们可以通过这个地址来访问对象. 例如: int main() { Time *pt1 = new Time(8, 8, 8); pt1 -> show_time(); delet
-
如何使用正则匹配最后一个字符串详解
前几天遇到一个需求,输入的是 <user> <user> <name>a</name> </user> <user> <name>a</name> </user> </user> <password>123</password> 要求拿到 <user> <user> <name>a</name> </user&
-
使用vue脚手架(vue-cli)搭建一个项目详解
1.首先得下载node.js.方法可自行百度. 2. 3.一开始报很多错误,后来用管理员就没问题了. 4. 5.如上图会遇到卡住的问题,解决方法是 在最后一个选项上选择No,I will handle it myselft,然后cd vue_test,然后cnpm install,这样就成功了,然后执行npm run dev就出现: 6.浏览器端访问localhost:8081 7.项目目录 8.图片来源于网络 以上所述是小编给大家介绍的vue脚手架(vue-cli)搭建项目详解整合,希望对大家
-
C++对象的动态建立与释放详解
=============下面先给出一个new和delete基本应用的例子,回顾一下它的基本用法============ 复制代码 代码如下: #include<iostream>using namespace std;int main(){ int *p;//定义一个指向int型变量的指针p p=new int(3);//开辟一个存放整数的存储空间,返回一个指向该存储空间的的地址 cout<<*p<<endl; delete p;//释放该空间 char *p_
-
ios实现自动获取label高度、宽度及最后一个位置详解
前言 本文主要给大家介绍了关于ios自动获取label高度.宽度及最后一个位置的相关内容,分享出来供大家参考学习,下面话不多说了,来一起看看详细的介绍吧. 一.获取宽度,获取字符串不折行单行显示时所需要的长度 CGSize titleSize = [aString sizeWithFont:font constrainedToSize:CGSizeMake(MAXFLOAT, 30)]; 注:如果想得到宽度的话,size的width应该设为MAXFLOAT. 二.获取高度,获取字符串在指定的si
-
Swift类型创建之自定义一个类型详解
小伙伴们,Swift中的Bool类型有着非常重要的语法功能,并支撑起了整个Swift体系中的逻辑判断体系,经过老码的研究和学习, Bool类型本身其实是对基础Boolean类型封装,小伙伴们可能咬着手指头问老码,怎么一会Bool类型,一会Boolean类型,其区别在于,前者是基于枚举的组合类型,而后者则是基本类型,只有两种true和false. ####自定义原型 接下老码根据Bool的思想来创建一个OCBool类型,来让小伙伴们了解一下Swift中到底是怎么玩儿的. 来我们先看一下OCBool
-
关于javascript event flow 的一个bug详解
我最近调netsurf也遇到一个相关的bug : alert() 被调了两次.html 代码: 复制代码 代码如下: <html><head><title>alert onclick example</title> <script type="text/javascript"> function causealert(){var txt = document.getElementById("p1").tex
-
Android如何从实现到封装一个MVP详解
前言 MVP 是从经典的模式MVC演变而来,它们的基本思想有相通的地方:Controller/Presenter负责逻辑的处理,Model提供数据,View负 责显示.下面这篇文章主要给大家介绍了关于Android从实现到封装MVP的相关内容,分享出来供大家参考学习,下面话不多说了,来一起看看详细的介绍吧. MVP之间的联系 大概简单的解释就是M->module处理数据,V->Act显示界面,P->M和V沟通的渠道,即P用来将数据和界面联系到一起,这样子界面和数据就可以完全独立开来,Ac
-
如何使node也支持从url加载一个module详解
前言 最近两天 ry 大神的 deno 火了一把.作为 node 项目的发起人,现在又基于 go 重新写了一个类似 node 的项目命名为 deno,引发了大家的强烈关注. 在 deno 项目 readme 的开始就列举出了这个项目的优势和需要解决的问题,里面最让我瞩目的就是模块原生支持 ts ,同时也能也必须从 url 加载模块,这也是与现有的 CommonJS 最大的不同. 仔细思考一下,deno 的模块化与 CommonJS 相比,更多的是一些 runtime 的能力.现有的 Common