Python中使用Opencv开发停车位计数器功能
目录
- 1. 环境安装
- 1.1 安装并激活虚拟环境
- 1.2 python包安装
- 2. 绘制停车位矩形框
- 2.1 导入停车场图片
- 2.2 绘制矩形框 定位停车位
- 2.3 鼠标添加、删除停车位
- 3. 停车位视频分析
- 3. 1 停车监控视频
- 3. 2 截取停车位
- 3. 3 图像处理
- 3. 4 判断停车位是否被占用
在这个项目中,我们将创建一个停车位计数器。我们会发现总共有多少辆车,以及有多少停车位是空的。关于本教程最好的一点是,我们将使用基本的图像处理技术来解决这个问题,没有使用机器学习、深度学习进行训练来识别。
1. 环境安装
1.1 安装并激活虚拟环境
python -m venv venv
cd venv\Scripts .\activate.bat
1.2 python包安装
pip install opencv-python
2. 绘制停车位矩形框
2.1 导入停车场图片
import cv2
import pickle
img=cv2.imread('carParkImg.png')
cv2.imshow("image",img)

2.2 绘制矩形框 定位停车位
import cv2
import pickle
img=cv2.imread('carParkImg.png')
cv2.rectangle(img,(50,192),(157,240),(255,0,255),2) #坐标位置可以多次尝试确定
cv2.imshow("image",img)
cv2.waitKey(0)

可以看出,每个停车位的估计宽、高为:
width=107 # 157-102 height = 48 # 240 - 192
2.3 鼠标添加、删除停车位
import cv2
import pickle
img=cv2.imread('carParkImg.png')
width,height = 107,48
posList = [] # 鼠标点击的坐标集合
def mouseClick(events,x,y,flags,params):
if events == cv2.EVENT_LBUTTONDOWN:
posList.append((x,y))
while True:
img = cv2.imread("carParkImg.png")
cv2.imshow("images",img)
for pos in posList:
cv2.rectangle(img,pos,(pos[0]+width,pos[1]+height),(255,0,255),2) #坐标位置可以多次尝试确定
cv2.imshow("image",img)
cv2.setMouseCallback("images",mouseClick)
if cv2.waitKey(10) & 0xFF== ord('q'):
break

通过鼠标点击在任何位置添加矩形框,但当矩形框位置出错时,无法进行删除。因此通过添加鼠标右键的事件,删除错误的矩形框。
def mouseClick(events,x,y,flags,params): if events == cv2.EVENT_LBUTTONDOWN: posList.append((x,y)) if events == cv2.EVENT_RBUTTONDOWN: for i,pos in enumerate(posList): x1,y1=pos if x1 < x < x1 +width and y1 < y <y1 +height: posList.pop(i)
通过pickle.dump()保持保存鼠标点击的位置信息。
with open('CarParkPos','wb') as f:
pickle.dump(posList,f)
通过pickle.load()加载保存好的位置信息,即在原有的停车位添加或删除停车位,而不是每一帧画面重新绘制。
with open('CarParkPos','wb') as f:
posList = pickle.load(f)
完整代码如下:
import cv2
import pickle
img=cv2.imread('carParkImg.png')
width,height = 107,48
try:
with open('CarParkPos','rb') as f:
posList = pickle.load(f)
except:
posList = []
# posList = [] # 鼠标点击的坐标集合
def mouseClick(events,x,y,flags,params):
if events == cv2.EVENT_LBUTTONDOWN:
posList.append((x,y))
if events == cv2.EVENT_RBUTTONDOWN:
for i,pos in enumerate(posList):
x1,y1=pos
if x1 < x < x1 +width and y1 < y <y1 +height:
posList.pop(i)
with open('CarParkPos','wb') as f:
pickle.dump(posList,f)
while True:
img = cv2.imread("carParkImg.png")
for pos in posList:
cv2.rectangle(img,pos,(pos[0]+width,pos[1]+height),(255,0,255),2) #坐标位置可以多次尝试确定
cv2.imshow("image",img)
cv2.setMouseCallback("image",mouseClick)
if cv2.waitKey(10) & 0xFF== ord('q'):
break
3. 停车位视频分析
3. 1 停车监控视频
import cv2
import pickle
import cvzone
import numpy as np
# Video feed
cap = cv2.VideoCapture('carPark.mp4')
while True:
success,img= cap.read()
cv2.imshow("Image",img)
if cv2.waitKey(10) & 0xFF== ord('q'):
break
视频时间比较短,为了让视频循环播放,添加如下代码:
if cap.get(cv2.CAP_PROP_POS_FRAMES) == cap.get(cv2.CAP_PROP_FRAME_COUNT): cap.set(cv2.CAP_PROP_POS_FRAMES,0)
- cv2.CAP_PROP_POS_FRAMES :视频播放当前帧
- cv2.CAP_PROP_FRAME_COUNT :视频总帧数
即:当前视频播放到结尾时,重新播放
3. 2 截取停车位
截取停车位,回来对每个停车位进行图像处理,从而分析该停车位是否被占用
def checkParkingSpace():
for pos in posList:
x,y = pos
imgCrop=img[y:y+height,x:x+width]
cv2.imshow(str(x*y),imgCrop)

3. 3 图像处理
对图像二值化、高斯模糊处理
imgGray =cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) imgBlur =cv2.GaussianBlur(imgGray,(3,3),1)

利用自适应二值化对图像进行处理
imgThreshold=cv2.adaptiveThreshold(imgBlur,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,25,16)
cv2.adaptiveThreshold 参数的选择可以通过TrackBar拖到滚动条,直到选择合适的数值。

可以看出停车位上有车辆时白色像素点比较多,停车位没有车辆时,白色像素点很少甚至没有,因此我们可以基于白色像素点数量来确定该车为是否被占用。同时可以看到当停车位为空时存在一些椒盐噪声,通过medianBlur来处理椒盐噪声
imgMedian = cv2.medianBlur(imgThreshold,5)

可以看出椒盐噪声少了一部分。
使用dilate(膨胀)增强白色像素值,便于更好区分每个停车位是否被占用
kernel=np.ones((3,3),np.uint8); imgDilate=cv2.dilate(imgMedian,kernel,iterations=1)

可以看出白色的轮廓比之前加厚了
3. 4 判断停车位是否被占用
截取每个停车位,经过处理后的图像,统计白色像素的数量
修改checkParkingSpace函数,将处理好的图像传入函数
def checkParkingSpace(imgProc):
for pos in posList:
x,y = pos
imgCrop=imgProc[y:y+height,x:x+width]
count=cv2.countNonZero(imgCrop)
cvzone.putTextRect(img,str(count),(x,y+height-3,scale =1.5,thickness=2,offset=0)
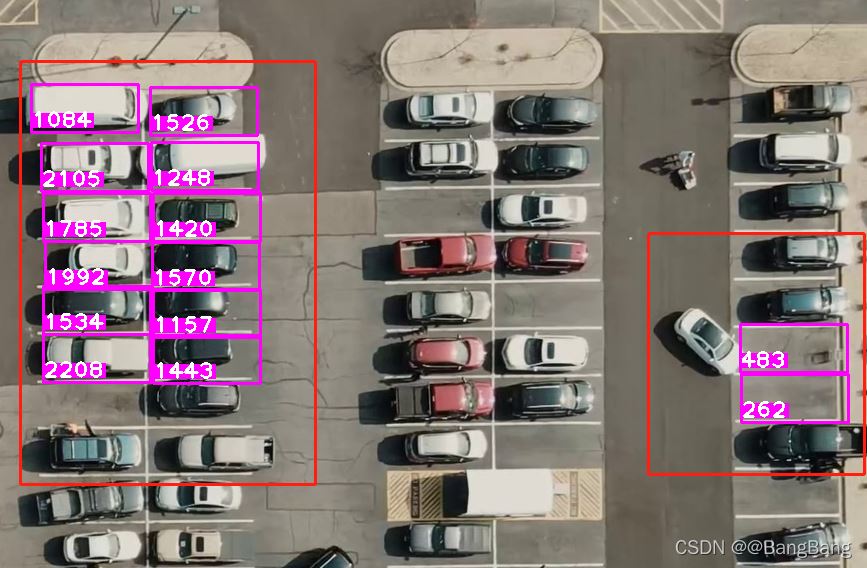
对比可以看出,占有车位的数值比较大1000-2000,空车位的200-500,数值的差距比较大。
画出所有停车位,对比找出合适的阈值,区分停车位为空还是被占用了。

可以看出停车位为空时,值为0-600,而停车位被占用,值为:960-2300,因此我们设定阈值为750。所以低于750此时停车位没有车,高于950则停车位有车。

加上文字描述
代码
import cv2
import pickle
import cvzone
import numpy as np
# Video feed
cap = cv2.VideoCapture('carPark.mp4')
with open('CarParkPos','rb') as f:
posList = pickle.load(f)
width,height=107,48
def checkParkingSpace(imgProc):
spaceCounter=0
for pos in posList:
x,y = pos
imgCrop=imgProc[y:y+height,x:x+width]
count=cv2.countNonZero(imgCrop)
if count < 950:
color = (0,255,0)
thickness = 5
spaceCounter +=1
else:
color = (0,0,255)
thickness = 2
cv2.rectangle(img,pos,(pos[0]+width,pos[1]+height),color,thickness=thickness)
cvzone.putTextRect(img,str(count),(x,y+height-5),scale =1.5,thickness=2,offset=0,colorR=color)
cvzone.putTextRect(img,f'Free{spaceCounter}/{len(posList)}',(100,50),scale =3,thickness=5,offset=20,colorR=(0,200,0))
while True:
if cap.get(cv2.CAP_PROP_POS_FRAMES) == cap.get(cv2.CAP_PROP_FRAME_COUNT):
cap.set(cv2.CAP_PROP_POS_FRAMES,0)
success,img= cap.read()
imgGray =cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
imgBlur =cv2.GaussianBlur(imgGray,(3,3),1)
imgThreshold=cv2.adaptiveThreshold(imgBlur,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,cv2.THRESH_BINARY_INV,25,16)
imgMedian = cv2.medianBlur(imgThreshold,5)
kernel=np.ones((3,3),np.uint8);
imgDilate=cv2.dilate(imgMedian,kernel,iterations=1)
checkParkingSpace(imgDilate)
# for pos in posList:
# cv2.rectangle(img,pos,(pos[0]+width,pos[1]+height),(255,0,255),2)
cv2.imshow("Image",img)
# cv2.imshow("imgBlur",imgBlur)
# cv2.imshow("imgThreshold",imgThreshold)
# cv2.imshow("imgMedian",imgMedian)
# cv2.imshow("imgDilate",imgDilate)
if cv2.waitKey(10) & 0xFF== ord('q'):
break
最终效果如下:

源码链接:https://github.com/yuanxinshui/Opencv-project/tree/main/39%20Parking%20Space%20Counter
到此这篇关于Python中使用Opencv开发停车位计数器的文章就介绍到这了,更多相关python Opencv停车位计数器内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

基于OpenCV目标跟踪实现人员计数器
目录 1.了解对象检测与对象跟踪 2.结合对象检测和对象跟踪 3.项目结构 4.结合对象跟踪算法 5.创建可追踪对象 6.使用OpenCV+Python实现我们的人员计数器 7.完整代码 people_counter.py centroidtracker.py trackableobject.py 8.运行结果 9.改进我们的人员计数器应用程序 BONUS 在本教程中,您将学习如何使用 OpenCV 和 Python 构建人员计数器.使用 OpenCV,我们将实时计算进或出百货商店的人数. 在今
-
Python中使用Opencv开发停车位计数器功能
目录 1. 环境安装 1.1 安装并激活虚拟环境 1.2 python包安装 2. 绘制停车位矩形框 2.1 导入停车场图片 2.2 绘制矩形框 定位停车位 2.3 鼠标添加.删除停车位 3. 停车位视频分析 3. 1 停车监控视频 3. 2 截取停车位 3. 3 图像处理 3. 4 判断停车位是否被占用 在这个项目中,我们将创建一个停车位计数器.我们会发现总共有多少辆车,以及有多少停车位是空的.关于本教程最好的一点是,我们将使用基本的图像处理技术来解决这个问题,没有使用机器学习.深度学习进行训
-
Python下应用opencv 实现人脸检测功能
使用OpenCV's Haar cascades作为人脸检测,因为他做好了库,我们只管使用. 代码简单,除去注释,总共有效代码只有10多行. 所谓库就是一个检测人脸的xml 文件,可以网上查找,下面是一个地址: https://github.com/opencv/opencv/blob/master/data/haarcascades/haarcascade_frontalface_default.xml 如何构造这个库,学习完本文后可以参考: http://note.sonots.com/Sc
-
python中的opencv 图像分割与提取
目录 图像分割与提取 用分水岭算法实现图像分割与提取 算法原理 相关函数介绍 分水岭算法图像分割实例 交互式前景提取 图像分割与提取 图像中将前景对象作为目标图像分割或者提取出来.对背景本身并无兴趣分水岭算法及GrabCut算法对图像进行分割及提取. 用分水岭算法实现图像分割与提取 分水岭算法将图像形象地比喻为地理学上的地形表面,实现图像分割,该算法非常有效. 算法原理 任何一幅灰度图像,都可以被看作是地理学上的地形表面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷. 左图是原
-
在python中利用opencv简单做图片比对的方法
下面代码中利用了两种比对的方法,一 对图片矩阵(m x m)求解特征值,通过比较特征值是否在一定的范围内,判断图片是否相同.二 对图片矩阵(m x m)中1求和,通过比较sum和来比较图片. # -*- coding: utf-8 -*- import cv2 as cv import numpy as np import os file_dir_a='C:\Users\wt\Desktop\data\image1\\' file_dir_b='C:\Users\wt\Desktop\data\
-
详解在Python中使用OpenCV进行直线检测
目录 1.引言 2.霍夫变换 3.举个栗子 3.1读入图像进行灰度化 3.2执行边缘检测 3.3进行霍夫变换 补充 1. 引言 在图像处理中,直线检测是一种常见的算法,它通常获取n个边缘点的集合,并找到通过这些边缘点的直线.其中用于直线检测,最为流行的检测器是基于霍夫变换的直线检测技术. 2. 霍夫变换 霍夫变换是图像处理中的一种特征提取方法,可以识别图像中的几何形状.它将在参数空间内进行投票来决定其物体形状,通过检测累计结果找到一极大值所对应的解,利用此解即可得到一个符合特定形状的参数. 在使
-
python中的opencv 图像梯度
目录 图像梯度 Sobel理论基础 计算水平方向偏导数的近似值 计算垂直方向偏导数的近似值 Sobel算子及函数使用 方向 计算x方向和y方向的边缘叠加 Scharr算子及函数使用 Sobel算子和Scharr算子的比较 Laplacian算子及函数使用 算子总结 图像梯度 图像梯度计算的是图像变化的速度.对于图像的边缘部分,其灰度值变化较大,梯度值也较大:相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小.图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的
-
Python中使用OpenCV库来进行简单的气象学遥感影像计算
OpenCV的全称是Open Source Computer Vision Library,是一个跨平台的计算机视觉库.OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用.OpenCV可用于开发实时的图像处理.计算机视觉以及模式识别程序.该程序库也可以使用英特尔公司的IPP进行加速处理. OpenCV用C++语言编写,它的主要接口也是C++语言,但是依然保留了大量的C语言接口.该库也有大量的Python, Java and MATLAB/OCTAVE
-
Python中实现常量(Const)功能
python语言本身没有提供const,但实际开发中经常会遇到需要使用const的情形,由于语言本身没有这种支出,因此需要使用一些技巧来实现这一功能 定义const类如下 复制代码 代码如下: import sys class Const(object): class ConstError(TypeException): pass def __setattr__(self, key, value): if self.__dict__.has_key(key):
-
树莓派用python中的OpenCV输出USB摄像头画面
本文实例为大家分享了python OpenCV来表示USB摄像头画面的具体代码,供大家参考,具体内容如下 确认Python版本 $ python Python 2.7.13 (default, Jan 19 2019, 14:48:08) [GCC 6.3.0 20170124] on linux2 Type "help", "copyright", "credits" or "license" for more inform
-
python中实现php的var_dump函数功能
最近在做python的web开发(原谅我的多变,好东西总想都学着...node.js也是),不过过程中总遇到些问题,不管是web.py还是django,开发起来确实没用php方便,毕竟存在的时间比较短,很多不完善的地方. 比如我在调试php中最常用的函数,var_dump,在python里找不到合适的替代函数.php中var_dump是一个特别有用的函数,它可以输出任何变量的值,不管你是一个对象还是一个数组,或者只是一个数.它总能用友好的方式输出,我调试的时候经常会需要看某位置的变量信息,调用它