Python中OpenCV图像特征和harris角点检测
目录
- 概念
- 第一步:计算一个梯度 Ix,Iy
- 第二步:整合矩阵,计算特征值
- 第三步:比较特征值的大小
- 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉
- 代码实现
概念

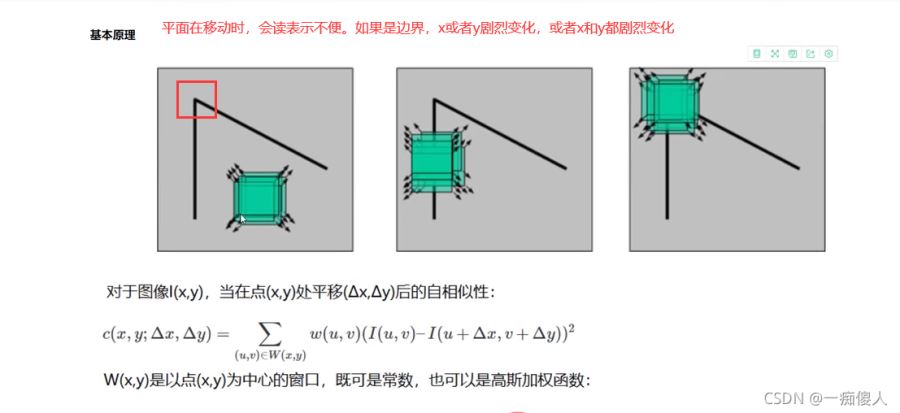
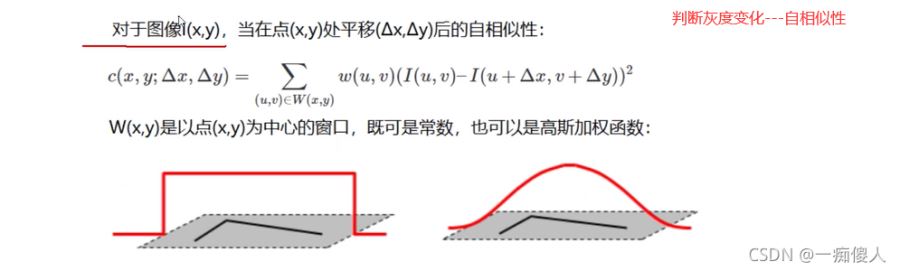

第一步:计算一个梯度 Ix,Iy

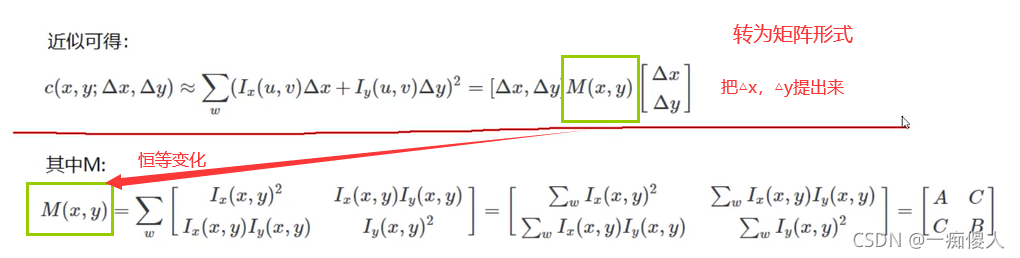

第二步:整合矩阵,计算特征值
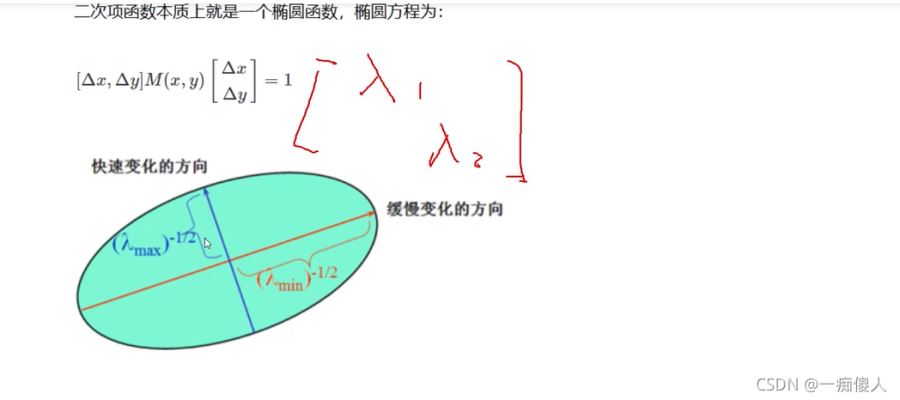
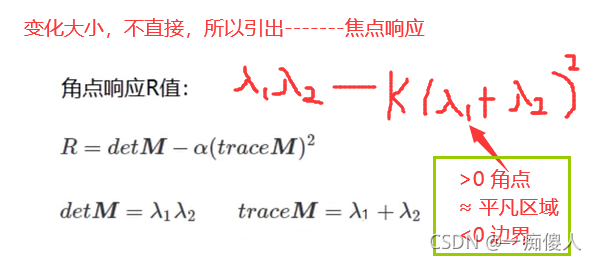
第三步:比较特征值的大小

第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉
代码实现

import cv2
import numpy as np
img =cv2.imread('pie.png')
print('img.shape',img.shape)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#gray = np.float32(gray)
dst = cv2.cornerHarris(gray,2,3,0.04)
print('dst.shape',dst.shape)

img[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow('dst',img)
cv2.waitKey(0)
cv2.destroyAllWindows()





到此这篇关于Python中OpenCV图像特征和harris角点检测的文章就介绍到这了,更多相关OpenCV-图像特征-harris角点检测内容请搜索我们以前的文章或继续浏览下面的相关文章希望大家以后多多支持我们!
相关推荐
-

Android基于OpenCV实现Harris角点检测
目录 什么是角点? 为什么要检测角点? Harris角点检测 API 操作 效果 源码 什么是角点? 角点就是极值点,即在某方面属性特别突出的点.当然,你可以自己定义角点的属性(设置特定熵值进行角点检测).角点可以是两条线的交叉处,也可以是位于相邻的两个主要方向不同的事物上的点.角点通常被定义为两条边的交点,或者说,角点的局部邻域应该具有两个不同区域的不同方向的边界.常见的角点有: 灰度梯度的最大值对应的像素点: 两条直线或者曲线的交点: 一阶梯度的导数最大值和梯度方向变化率最大的像素点: 一阶
-
Python使用Opencv实现图像特征检测与匹配的方法
特征检测是计算机对一张图像中最为明显的特征进行识别检测并将其勾画出来.大多数特征检测都会涉及图像的角点.边和斑点的识别.或者是物体的对称轴. 角点检测 是由Opencv的cornerHarris函数实现,其他函数参数说明如下: cv2.cornerHarris(src=gray, blockSize=9, ksize=23, k=0.04) # cornerHarris参数: # src - 数据类型为 float32 的输入图像. # blockSize - 角点检测中要考虑的领域大小. #
-
OpenCV哈里斯(Harris)角点检测的实现
环境 pip install opencv-python==3.4.2.16 pip install opencv-contrib-python==3.4.2.16 理论 克里斯·哈里斯(Chris Harris)和迈克·史蒂芬斯(Mike Stephens)在1988年的论文<组合式拐角和边缘检测器>中做了一次尝试找到这些拐角的尝试,所以现在将其称为哈里斯拐角检测器. 函数:cv2.cornerHarris(),cv2.cornerSubPix() 示例代码 import cv2 impor
-
OpenCV特征提取与检测之Harris角点检测
目录 前言 1. 效果图 2. 原理 3. 源码 3.1 Harris角点检测 3.2 精细角点检测 总结 前言 这篇博客将了解什么是特征,角点,哈里斯角点检测(Harris Corner Detection)的概念.并使用cv2.cornerHarris(),cv2.cornerSubPix()实现哈里斯角点检测: 1. 效果图 原图 VS Harris角点检测效果图如下: 原图 VS Harris角点检测效果图如下: 惊细角点效果图如下:Harris角点用红色像素标记,精细角点用绿色像素标记
-
opencv2基于SURF特征提取实现两张图像拼接融合
本文实例为大家分享了opencv2实现两张图像拼接融合的具体代码,供大家参考,具体内容如下 要用到两个文件,estimate.cpp和matcher.h(在有关鲁棒匹配这篇博文中有) estimate.cpp的头文件也需要添加一些东西才行,以下是对的,已经成功运行. 加了using namespace std;之后,cv::可以去掉了. estimate.cpp: #include <iostream> #include <vector> #include <opencv2/
-
Python中OpenCV图像特征和harris角点检测
目录 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 概念 第一步:计算一个梯度 Ix,Iy 第二步:整合矩阵,计算特征值 第三步:比较特征值的大小 第四步: 非极大值抑制,把真正的角点留下来,角点周围的过滤掉 代码实现 import cv2 import numpy as np img =cv2.imread('pie.png') print('img.shape',img.
-
python中opencv图像叠加、图像融合、按位操作的具体实现
目录 1图像叠加 2图像融合 3按位操作 1图像叠加 可以通过OpenCV函数cv.add()或简单地通过numpy操作添加两个图像,res = img1 + img2.两个图像应该具有相同的深度和类型,或者第二个图像可以是标量值. NOTE: OpenCV添加是饱和操作,也就是有上限值,而Numpy添加是模运算. 添加两个图像时, OpenCV功能将提供更好的结果.所以总是更好地坚持OpenCV功能. 代码: import cv2 import numpy as np x = np.uint8
-
Python中人脸图像特征提取方法(HOG、Dlib、CNN)简述
目录 人脸图像特征提取方法 (一)HOG特征提取 (二)Dlib库 (三)卷积神经网络特征提取(CNN) 人脸图像特征提取方法 (一)HOG特征提取 1.HOG简介 Histogram of Oriented Gridients,缩写为HOG,是目前计算机视觉.模式识别领域很常用的一种描述图像局部纹理的特征.它的主要思想是在一副图像中,局部目标的表象和形状能够被梯度或边缘的方向密度分布很好地描述.其本质为:梯度的统计信息,而梯度主要存在于边缘的地方. 2.实现方法 首先将图像分成小的连通区域,这
-
python中opencv K均值聚类的实现示例
目录 K均值聚类 K均值聚类的基本步骤 K均值聚类模块 简单例子 K均值聚类 预测的是一个离散值时,做的工作就是“分类”. 预测的是一个连续值时,做的工作就是“回归”. 机器学习模型还可以将训练集中的数据划分为若干个组,每个组被称为一个“簇(cluster)”.这种学习方式被称为“聚类(clusting)”,它的重要特点是在学习过程中不需要用标签对训练样本进行标注.也就是说,学习过程能够根据现有训练集自动完成分类(聚类). 根据训练数据是否有标签,可以将学习划分为监督学习和无监督学习. K近邻.
-
python 实现Harris角点检测算法
算法流程: 将图像转换为灰度图像 利用Sobel滤波器求出 海森矩阵 (Hessian matrix) : 将高斯滤波器分别作用于Ix².Iy².IxIy 计算每个像素的 R= det(H) - k(trace(H))².det(H)表示矩阵H的行列式,trace表示矩阵H的迹.通常k的取值范围为[0.04,0.16]. 满足 R>=max(R) * th 的像素点即为角点.th常取0.1. Harris算法实现: import cv2 as cv import numpy as np impo
-
使用Python中OpenCV和深度学习进行全面嵌套边缘检测
这篇博客将介绍如何使用OpenCV和深度学习应用全面嵌套的边缘检测.并将对图像和视频流应用全面嵌套边缘检测,然后将结果与OpenCV的标准Canny边缘检测器进行比较. 1. 效果图 愤怒的小鸟--原始图 VS Canny边缘检测图 VS HED边缘检测图 花朵--原始图 VS Canny边缘检测图 VS HED边缘检测图 视频效果图GIF 如下 2. 全面嵌套边缘检测与Canny边缘检测 2.1 Hed与Canny边缘检测对比 Holistically-Nested Edge Detectio
-
Python中OpenCV实现简单车牌字符切割
在Jupyter Notebook上使用Python+opencv实现如下简单车牌字符切割.关于opencv库的安装可以参考:Python下opencv库的安装过程与一些问题汇总. 1.实现代码 import cv2 import numpy as np import matplotlib.pyplot as plt from PIL import Image #读取原图片 image1=cv2.imread("123456.jpg") cv2.imshow("image1&
-
python中opencv实现文字分割的实践
图片文字分割的时候,常用的方法有两种.一种是投影法,适用于排版工整,字间距行间距比较宽裕的图像:还有一种是用OpenCV的轮廓检测,适用于文字不规则排列的图像. 投影法 对文字图片作横向和纵向投影,即通过统计出每一行像素个数,和每一列像素个数,来分割文字. 分别在水平和垂直方向对预处理(二值化)的图像某一种像素进行统计,对于二值化图像非黑即白,我们通过对其中的白点或者黑点进行统计,根据统计结果就可以判断出每一行的上下边界以及每一列的左右边界,从而实现分割的目的. 算法步骤: 使用水平投影和垂直投