python opencv检测目标颜色的实例讲解
实例如下所示:
# -*- coding:utf-8 -*-
__author__ = 'kingking'
__version__ = '1.0'
__date__ = '14/07/2017'
import cv2
import numpy as np
import time
if __name__ == '__main__':
Img = cv2.imread('example.png')#读入一幅图像
kernel_2 = np.ones((2,2),np.uint8)#2x2的卷积核
kernel_3 = np.ones((3,3),np.uint8)#3x3的卷积核
kernel_4 = np.ones((4,4),np.uint8)#4x4的卷积核
if Img is not None:#判断图片是否读入
HSV = cv2.cvtColor(Img, cv2.COLOR_BGR2HSV)#把BGR图像转换为HSV格式
'''
HSV模型中颜色的参数分别是:色调(H),饱和度(S),明度(V)
下面两个值是要识别的颜色范围
'''
Lower = np.array([20, 20, 20])#要识别颜色的下限
Upper = np.array([30, 255, 255])#要识别的颜色的上限
#mask是把HSV图片中在颜色范围内的区域变成白色,其他区域变成黑色
mask = cv2.inRange(HSV, Lower, Upper)
#下面四行是用卷积进行滤波
erosion = cv2.erode(mask,kernel_4,iterations = 1)
erosion = cv2.erode(erosion,kernel_4,iterations = 1)
dilation = cv2.dilate(erosion,kernel_4,iterations = 1)
dilation = cv2.dilate(dilation,kernel_4,iterations = 1)
#target是把原图中的非目标颜色区域去掉剩下的图像
target = cv2.bitwise_and(Img, Img, mask=dilation)
#将滤波后的图像变成二值图像放在binary中
ret, binary = cv2.threshold(dilation,127,255,cv2.THRESH_BINARY)
#在binary中发现轮廓,轮廓按照面积从小到大排列
contours, hierarchy = cv2.findContours(binary,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
p=0
for i in contours:#遍历所有的轮廓
x,y,w,h = cv2.boundingRect(i)#将轮廓分解为识别对象的左上角坐标和宽、高
#在图像上画上矩形(图片、左上角坐标、右下角坐标、颜色、线条宽度)
cv2.rectangle(Img,(x,y),(x+w,y+h),(0,255,),3)
#给识别对象写上标号
font=cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(Img,str(p),(x-10,y+10), font, 1,(0,0,255),2)#加减10是调整字符位置
p +=1
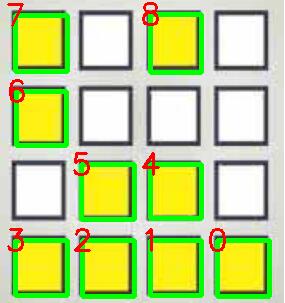
print '黄色方块的数量是',p,'个'#终端输出目标数量
cv2.imshow('target', target)
cv2.imshow('Mask', mask)
cv2.imshow("prod", dilation)
cv2.imshow('Img', Img)
cv2.imwrite('Img.png', Img)#将画上矩形的图形保存到当前目录
while True:
Key = chr(cv2.waitKey(15) & 255)
if Key == 'q':
cv2.destroyAllWindows()
break
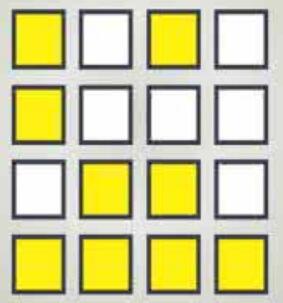
原始图像
处理之后保存的图像
以上这篇python opencv检测目标颜色的实例讲解就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持我们。
相关推荐
-
python开启摄像头以及深度学习实现目标检测方法
最近想做实时目标检测,需要用到python开启摄像头,我手上只有两个uvc免驱的摄像头,性能一般.利用python开启摄像头费了一番功夫,主要原因是我的摄像头都不能用cv2的VideCapture打开,这让我联想到原来opencv也打不开Android手机上的摄像头(后来采用QML的Camera模块实现的).看来opencv对于摄像头的兼容性仍然不是很完善. 我尝了几种办法:v4l2,v4l2_capture以及simpleCV,都打不开.最后采用pygame实现了摄像头的采集功能,这里直接给大
-
10 行Python 代码实现 AI 目标检测技术【推荐】
只需10行Python代码,我们就能实现计算机视觉中目标检测. from imageai.Detection import ObjectDetection import os execution_path = os.getcwd() detector = ObjectDetection() detector.setModelTypeAsRetinaNet() detector.setModelPath( os.path.join(execution_path , "resnet50_coco_b
-

Python+OpenCV目标跟踪实现基本的运动检测
目标跟踪是对摄像头视频中的移动目标进行定位的过程,有着非常广泛的应用.实时目标跟踪是许多计算机视觉应用的重要任务,如监控.基于感知的用户界面.增强现实.基于对象的视频压缩以及辅助驾驶等. 有很多实现视频目标跟踪的方法,当跟踪所有移动目标时,帧之间的差异会变的有用:当跟踪视频中移动的手时,基于皮肤颜色的均值漂移方法是最好的解决方案:当知道跟踪对象的一方面时,模板匹配是不错的技术. 本文代码是做一个基本的运动检测 考虑的是"背景帧"与其它帧之间的差异 这种方法检测结果还是挺不错的,但是需要
-
python+opencv+caffe+摄像头做目标检测的实例代码
首先之前已经成功的使用Python做图像的目标检测,这回因为项目最终是需要用摄像头的, 所以实现摄像头获取图像,并且用Python调用CAFFE接口来实现目标识别 首先是摄像头请选择支持Linux万能驱动兼容V4L2的摄像头, 因为之前用学ARM的时候使用的Smart210,我已经确认我的摄像头是支持的, 我把摄像头插上之後自然就在 /dev 目录下看到多了一个video0的文件, 这个就是摄像头的设备文件了,所以我就没有额外处理驱动的部分 一.检测环境 再来在开始前因为之前按着国嵌的指导手册安
-
Python Opencv任意形状目标检测并绘制框图
opencv 进行任意形状目标识别,供大家参考,具体内容如下 工作中有一次需要在简单的图上进行目标识别,目标的形状不固定,并且存在一定程度上的噪声影响,但是噪声影响不确定.这是一个简单的事情,因为图像并不复杂,现在将代码公布如下: import cv2 def otsu_seg(img): ret_th, bin_img = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) return ret_th, bin_img d
-
python opencv检测目标颜色的实例讲解
实例如下所示: # -*- coding:utf-8 -*- __author__ = 'kingking' __version__ = '1.0' __date__ = '14/07/2017' import cv2 import numpy as np import time if __name__ == '__main__': Img = cv2.imread('example.png')#读入一幅图像 kernel_2 = np.ones((2,2),np.uint8)#2x2的卷积核
-
python opencv 检测移动物体并截图保存实例
最近在老家找工作,无奈老家工作真心太少,也没什么面试机会,不过之前面试一家公司,提了一个有意思的需求,检测河面没有有什么船只之类的物体,我当时第一反应是用opencv做识别,不过回家想想,河面相对的东西比较少,画面比较单一,只需要检测有没有移动的物体不就简单很多嘛,如果做街道垃圾检测的话可能就很复杂了,毕竟街道上行人,车辆,动物,很多干扰物,于是就花了一个小时写了一个小的demo,只需在程序同级目录创建一个img目录就可以了 # -*-coding:utf-8 -*- __author__ =
-
python队列通信:rabbitMQ的使用(实例讲解)
(一).前言 为什么引入消息队列? 1.程序解耦 2.提升性能 3.降低多业务逻辑复杂度 (二).python操作rabbit mq rabbitmq配置安装基本使用参见上节文章,不再复述. 若想使用python操作rabbitmq,需安装pika模块,直接pip安装: pip install pika 1.最简单的rabbitmq producer端与consumer端对话: producer: #Author :ywq import pika auth=pika.PlainCredentia
-
对python数据切割归并算法的实例讲解
当一个 .txt 文件的数据过于庞大,此时想要对数据进行排序就需要先将数据进行切割,然后通过归并排序,最终实现对整体数据的排序.要实现这个过程我们需要进行以下几步:获取总数据行数:根据行数按照自己的需要对数据进行切割:对每组数据进行排序 最后对所有数据进行归并排序. 下面我们就来实现这整个过程: 一:获取总数据的行 def get_file_lines(file_path): # 目标文件的路径 file_path = str(file_path) with open(file_path, 'r
-
浅谈python opencv对图像颜色通道进行加减操作溢出
由于opencv读入图片数据类型是uint8类型,直接加减会导致数据溢出现象 (1)用Numpy操作 可以先将图片数据类型转换成int类型进行计算, data=np.array(image,dtype='int') 经过处理后(如:遍历,将大于255的置为255,小于0的置为0) 再将图片还原成uint8类型 data=np.array(image,dtype='uint8') 注意: (1)如果直接相加,那么 当像素值 > 255时,结果为对256取模的结果,例如:(240+66) % 256
-
python+opencv实现文字颜色识别与标定功能
最近接了一个比较简单的图像处理的单子,花了一点时间随便写了一下: 数据集客户没有是自己随便创建的: 程序如下: """ Code creation time:September 11, 2021 Author:PanBo Realize function:It mainly realizes the recognition and calibration of fonts with different colors """ import nump
-
Python+OpenCV实现基于颜色的目标识别
目录 任务 主要代码 效果展示 学习了一点opencv的知识于是找了个小项目来实践一下.这里先说明一下,我的实现方法不见得是最好的(因为这只是一个用于练习的项目)仅作参考,也欢迎各位大佬指正. 任务 让摄像头识别到视野范围内的气球并返回每个气球的中心点坐标. 因为场地固定,背景单一,所以省下来很多操作和处理.于是就有两种解决思路:第一种是基于气球形状做轮廓提取,只要是闭合椭圆或圆形形就认为是目标物体:第二种是基于气球颜色,只要符合目标物体的颜色就认为是目标物体. 因为摄像头是装在四足机器人(它的
-
Python制作个性化的词云图实例讲解
目录 1. 引言 2. 举个栗子 2.1 安装stylecloud库 2.2 生成词云图 2.3 美化显示效果 2.4 处理停用词 2.5 使用自定义背景图像 3. 总结 1. 引言 词云图可以让我们方便地识别出文本中的关键词,其中单词的大小代表它们的频率.有了这个,我们甚至在阅读之前就可以很好地了解文本的内容.虽然有很多免费的工具可以在线制作文字云,但我们可以使用万能的Python来定制个性化的词云图. 在本文中,我们将使用第三方Python库stylecloud,有了该库,可以通过简短的几行
-
python+opencv实现目标跟踪过程
目录 python opencv实现目标跟踪 这里根据官网示例写了一个追踪器类 python opencv实现目标跟踪 python-opencv3.0新增了一些比较有用的追踪器算法 这里根据官网示例写了一个追踪器类 程序只能运行在安装有opencv3.0以上版本和对应的contrib模块的python解释器 #encoding=utf-8 import cv2 from items import MessageItem import time import numpy as np ''' 监视
-
基于python select.select模块通信的实例讲解
要理解select.select模块其实主要就是要理解它的参数, 以及其三个返回值. select()方法接收并监控3个通信列表, 第一个是所有的输入的data,就是指外部发过来的数据,第2个是监控和接收所有要发出去的data(outgoing data),第3个监控错误信息在网上一直在找这个select.select的参数解释, 但实在是没有, 哎...自己硬着头皮分析了一下. readable, writable, exceptional = select.select(inputs, ou